| 4.12.1996 - старт 10 января 1997 года - коррекция 3 февраля 1997 года - коррекция 6 мая 1997 года - коррекция 25 июня 1997 года - коррекция 4 июля 1997 года - посадка на Марс 5 июля 1997 года - на поверхность Марс съехал «Соджорнер» 27 сентября 1997 года - последний контакт |
8 сентября. И.Лисов по материалам НАСА, сообщениям ИТАР-ТАСС и Франс Пресс. Спускаемый аппарат АМС "Mars Pathfinder" должен совершить посадку на Марс 4 июля 1997 года. Это произойдет в экваториальном районе, известном как Долина Арес, приблизительно в 850 км к юго-востоку от места посадки в 1976 году спускаемого аппарата АМС "Viking 1".
Цель экспедиции "Mars Pathfinder" - продемонстрировать недорогой технический комплекс для перелета, входа в атмосферу, спуска и посадки на Марс. Масса посадочного блока составит всего около 12 кг, а стоимость экспедиции - 250 млн $. РН "Delta" выведет станцию на траекторию перелета к Марсу в декабре 1996 - январе 1997 года.
Спускаемый аппарат станции войдет атмосферу Марса непосредственно с подлетной траектории и использует для торможения лобовой экран и парашютную систему. Непосредственно перед посадкой будут надуты амортизирующие емкости, которые смягчат посадку.
После приземления "Пасфайндера" с него сойдет микроровер - миниатюрный марсоход с радиусом действия 30 метров, в задачу которого входит исследование образцов грунта и пород. И на ровере, и на посадочном блоке будут установлены камеры для стереоскопической съемки и научные инструменты. Посадочный блок проведет измерения параметров атмосферы во время спуска, и будет служить метеостанцией и ретранслятором данных с ровера. На ровере будет установлен альфа-протонный рентгеновский спектрометр, предназначенный для анализа химического состава пород. С помощью видеосистемы ровера будет исследоваться минералогия поверхностных материалов, а также геологические процессы и создание и изменение поверхности во взаимодействии с атмосферой. Инструменты дадут также возможность определить размер пылевых частиц и содержание водяного пара в атмосфере.
Выбор места посадки обусловлен как техническими соображениями, так и научными интересами, говорит менеджер проекта Энтони Спеар (Anthony Spear). Поскольку источником энергии СА являются солнечные батареи, необходимы наилучшие условия освещенности. А в июле 1997 года Солнце будете зените над 15° с.ш. Марса. Желательна также посадка в как можно более низком относительно среднего уровня поверхности месте, чтобы парашют СА успел раскрыться в затормозить его до заданной конечной скорости.
Ранее в этом году большая группа специалистов по Марсу (более 60 ученых из США и Европы) участвовала в выборе места посадки с точки зрения научной ценности района. Идея состояла в том, чтобы исследовать область отложения пород, перенесенных мощными водными потоками, существовавшими на Марсе в древние геологические эпохи. Потоки шли с гор, прорезая холмистые равнины и выходы твердых пород. Были рассмотрены несколько районов, в которых эти русла выходили на Равнину Хриса (на ней 20 июля 1976 совершил посадку "Viking 1") - Долина Арес; Холмы Оксия, темный возвышенный район с корой и темными ветровыми отложениями; выносная дельта Долины Маджа, которой заканчивается старое русло; возвышенность Маджа, расположенная южнее одноименной долины. Все они были выбраны по данным съемки с орбитальных блоков "Викингов".
Выбрана была Долина Арес, тянущаяся от 3° с.ш., 17° з.д. к 15° с.ш., 30° з.д. Ввиду погрешностей навигации и прохождения атмосферного участка эллипс рассеяния точки посадки будет иметь размеры 100x200 км. Предполагается, что посадочный блок "Следопыта" должен сесть в устье одного из выходных русел. (Название станции дословно переводится как '"Марсианский следопыт", но ближе к сути его миссии было бы перевести "pathfinder" как "разведчик" или "первопроходец" - И.Л.).
Здесь, на небольшой площади, доступной микророверу, можно ожидать встречи с принесенными из множества мест разнообразными образцами грунта и пород, объясняет научный руководитель проекта д-р Мэттью Голомбек (Matthew Golombek) из Лаборатории реактивного движения. И хотя происхождение образцов останется неизвестным, их богатый выбор обещает открыть немало марсианских тайн.
Ввиду погрешностей навигации и прохождения атмосферного участка эллипс рассеяния точки посадка будет иметь размеры 100x200 км.
Дата же посадки подобрана специально и совпадает с национальным праздником США - Днем независимости. Следует отметить, что НАСА уже назначало однажды посадку на Марс на 4 июля ("Викинга-1" в 1976 году), но тогда ее отложили на две недели.
12 августа. По материалам журнала "Universe" (JPL). Лаборатория реактивного движения (JPL) НАСА получила от Университета Аризоны технический экземпляр системы построения изображения для АМС Mars Pathfinder. Система предназначена для фотографирования поверхности Марса с посадочного блока.
Группа специалистов Университета Аризоны под руководством Питера Смита (Peter Smith) получила заказ на разработку системы в результате быстро проведенного конкурса. Другими участниками работы стали фирма "Martin Marietta" (она изготовила камеру), Институт Макса Планка (ФРГ), поставивший для нее прибор с зарядовой связью (бесплатно с условием участия в обработке информации), и Институт Нильса Бора (Дания) с магнитными мишенями для изучения выдуваемой ветром марсианской пыли.
По условиям конкурса Университет Аризоны должен был предложить наибольший научный выход в рамках заданного потолка финансирования. Разработка и изготовление технического экземпляра заняли восемь месяцев: финансирование работы было начато в ноябре 1993. Разработчик представил в срок, систему, обладающую заявленными возможностями.
Система строит стереоскопическое изображение, необходимое для исследования форм рельефа и образцов и для управления микроровером. Наличие 24 цветных фильтров позволяет строить цветное изображение и получить важные данные по минералогии поверхности Марса с подробностями, недоступными для камер "Викингов". Отказ от собственного компьютера камеры значительно упростил ее подключение и управление. Функция управления возложена на основной компьютер посадочного блока.
Лаборатории также переданы программы управления камерой, алгоритмы сжатия данных и аппаратура для автономных испытаний, имитирующая взаимодействие с посадочным блоком. В настоящее время ведутся испытания системы построения изображения; ввиду его отличного качества предполагается оставить технический экземпляр для возможного использования в качестве источника запасных частей.
10 февраля. И.Лисов по сообщениям "JPL Universe", "Martian Chronicle" и материалам НАСА. Американским промышленным фирмам предложено к 1 апреля 1995 г. представить предложения по разработке двух марсианских аппаратов для экспедиции 1998 года. Тем временем работа над двумя станциями для запуска в 1996 г. идет полным ходом.
В официальных материалах НАСА запуски станций к Марсу расписаны до 2001 г. (Табл. 1). Лаборатория реактивного движения (JPI) планирует также запуски в 2003 и 2005 г. В июле 1994 г. в Лаборатории образован Отдел исследования Марса, задача которого - контролировать работы по всем запланированным в ходе 10-летней программы марсианским аппаратам.
Первыми к Марсу отправятся полярная орбитальная станция "Марс Глобал Сервейор", которая должна выполнить большую часть задач АМС "Марс Обсервер", и экспериментальная посадочная станция "Марс Пасфайндер" с самоходным устройством - микроровером, управляемым по проводам с самой станции. На 1998 г. запланирован запуск второй орбитальной станции и первого штатного посадочного аппарата. В последующие астрономические окна планируется пускать по два посадочных аппарата, предназначенных для исследования климата и состава почвы Марса, а также серию малых орбитальных станций для выполнения научных программ и обеспечения связи с посадочными станциями.
"Марс Пасфайндер" и "Марс Глобал Сервейор" полностью обеспечены финансированием, данные о котором (млн $) приведены в Табл.2.
| Наименование | Программа | 1994 ф.г. | 1995 ф.г. | 1996 ф.г. (запрос) |
| "Марс Пасфайндер" | "Дискавери" | 60.8 | 77.5 | 35.9 |
Запрошенных на 1996 ф.г. средств достаточно на завершение изготовления приборов и подсистем станции "Марс Пасфайндер", изготовление и установку на станцию приборов станции "Марс Глобал Пасфайндер", а также сборку обоих аппаратов и предстартовые испытания. Следует отметить, что для станции "Марс Пасфайндер" установлен потолок расходов в сумме 150 млн $ (в долларах 1992 г.). По-видимому, он будет превышен: стоимость посадочного аппарата оценивается в 171 млн $, ровера в 25 млн $, и еще 50 млн $ потребуется на запуск. Ограничение в 150 млн $ в год наложено также на всю программу "Марс Сервейор". ("Викинги", если бы их пришлось строить сейчас, стоили бы 4 млрд $.)
В рамках программы "Марс Пасфайндер" в течение 1994 г. была выполнена интеграция прототипов микроровера, системы построения изображения, аппарата и наземной системы данных для АМС. Выполнены две из пяти стадий отработки систем на имитаторе JPL. В частности, испытаны компьютер и летное программное обеспечение во взаимодействии с прототипом микроровера, технической моделью камеры посадочного аппарата и наземной системой данных. На третьей стадии будут отрабатываться сценарии работы на поверхности, включая сход микроровера с посадочного аппарата. Благодаря отработке на имитаторе должны быть заранее, до изготовления летного "металла", выявлены возможные ошибки.
Завершена проверка концепций компонентов и систем входа в атмосферу и посадки. План полета предусматривает прямой вход в атмосферу со скоростью около 8 км/с и быстрое аэродинамическое торможение. На высоте 10 км должен быть выведен парашют, который далее замедлит падение. На высоте 100 м будет выполнено гашение скорости с помощью твердотопливных двигателей, а затем произведено приземление, смягченное надуваемым азотным амортизатором. После посадки раскрываются три лепестка с солнечными батареями, благодаря чему приводится в вертикальное положение микроровер. Отработка аэродинамического щитка, средств надуваний газового амортизатора и его отделения, системы ракетного торможения проводились в Центре Эймса и на полигоне ВМС США Чайна-Лейк.
В 1995 г. будут закончены летная матчасть и программы, и с 1 июня начнется этап сборки, испытаний и запуска летного аппарата. Этот этап будет длиться почти 18 месяцев, вдвое больше длительности перелета, что позволит провести тщательные испытания, в том числе и приработку электроники, в течение 1000-2000 часов.
Отработка входа, спуска и приземления являются основными техническими целями пуска. В день посадки (4 июля 1997 г.) посадочная ступень должна передать многоцветные панорамные стереоизображения поверхности. В тот же день микроровер должен сойти с посадочной ступени, получить с помощью своих носовой и хвостовой камер изображения окрестностей и материнского аппарата, и доставить к скальным породам альфа-протонный рентгеновский спектрометр APXS для измерения элементного состава. Основной план предусматривает работу микроровера в течение одной недели и посадочного аппарата - в течение месяца, когда он будет использоваться в первую очередь как метеостанция. Если, однако, ничто не помешает им, оба смогут проработать дольше.
29 сентября. И.Лисов по материалам JPL и "Martian Chronicle". Специалисты Лаборатории реактивного движения (JPL) HACA продолжают подготовку марсианской станции "Mars Pathfinder", запуск которой намечен на 2 декабря 1996 г. 4 июля 1997 г. станция должна выполнить посадку на Марс в точке 19.5° с.ш., 32.8° з.д.
Как сообщает менеджер проекта Тони Спеар (Tony Spear), 1 июня начался 18-месячный этап сборки, испытаний и запуска станции (ATLO). Этот большой этап разбит на три отдельные фазы. В течение первой, с июня по декабрь 1995 г., проводится первичная интеграция подсистем, включая ровер и научные инструменты. Он должен завершиться системными испытаниями для всех фаз полета - запуска, перелета, входа в атмосферу, спуска и посадки и работы на поверхности. По сути, на этом этапе работ станция существует как бы в "двумерной" конфигурации. Перелетная и посадочная ступени стоят бок-о-бок, соединенные электрическими кабелями, и любой элемент аппарата можно легко извлечь. В работе находятся и технический, и летный комплекты.
Первая фаза представляет собой, в сущности, "разведку боем" перед этапом официальных испытаний. Специалисты ищут и находят проблемы, с которыми уже не придется бороться после. На этом этапе работа ведется в одну смену пять дней в неделю, а дополнительные смены и выходные используются в случаях отставания от графика. 36 резервных дней "встроены" в график работ 1-й фазы ATLO на случай непредвиденных обстоятельств.
Официальные испытания являются целью второго этапа ATLO, который пройдет в JPL с января по сентябрь 1996 г. Этот этап начнется со сборки летного аппарата, построенного по принципу русской матрешки: ровер, вокруг него сложена конструкция посадочного аппарата, которая в свою очередь заключена в "кокон" лобового щита и внешней конструкции.
Вторая фаза включает испытания аппарата "на живучесть": акустические вибрационные, баротермические (на этап перелета и на работу в атмосфере), пиротехнических средств, на электромагнитную совместимость, контроль массы, положения центра тяжести и центровки при вращении. Параллельно будут вестись системные испытания. Кроме того, проверяются все операции по сборке и разборке, которые потребуются на полигоне перед стартом. График этого этапа содержит 33 резервных дня. Вторая фаза завершится заключительными системными испытаниями, после чего летный аппарат будет частично разобран, упакован и отправлен вместе с обеспечивающим оборудованием на Восточный испытательный полигон (мыс Канаверал).
Здесь пройдет третий, предпусковой этап подготовки. Будет проведена окончательная сборка летного аппарата, включая установку тормозного экрана, парашюта, надувных воздушных емкостей, ракетных двигателей, пиросредств, заправку горючим. После сборки будут повторены проведенные в Пасадене заключительные системные испытания, затем последние проверки центровки на этапах перелета и посадки. Аппарат будет состыкован с носителем, пройдет отработка старта, проверка системы связи с ЦУПом в Пасадене, затем предстартовый отсчет и запуск. Здесь тоже должен остаться значительный резерв - 24 дня, известные как "пляжные дни" для всех, кто не нужен в данный момент.
Во время 7-й и 3-й фаз ATLO группа управления полетом набирает опыт, участвуя в системных испытаниях летных систем, выдавая команды на аппарат и получая телеметрию. Отрабатываются штатные программы работы станции, а непосредственно перед запуском загружается программное обеспечение. Управление аппаратом будет передано группе управления немедленно после запуска.
Тем временем на прошедшей неделе ученые JPL, Университета штата Аризона и Лунно-планетного института в Хьюстоне, чья научная аппаратура будет стоять на борту "Pathfinder'a" и ровера, исследовали в штате Вашингтон земной аналог марсианского места посадки этой станции.
Считается, что Долина Ареса (Ares Vallis), в устье которой должен сесть "Mars Pathfinder", образовалась в ходе катастрофического марсианского наводнения, вынесшего с гор в долину породы и отложения на раннем этапе истории Марса. Ученые отыскали подобное место на Земле - район вблизи городов Спокан и Мозес-Лейк в штате Вашингтон, известный как "паршивая земля" (Channeled Scablands) . Около 15000 лет назад ледниковое озеро Миссоула объемом с нынешние Эри и Онтарио прорвало ледяную дамбу, находившуюся в районе нынешнего озера Лейк-Панд-Орей и вызвало катастрофическое двухнедельное наводнение.
Благодаря сходству истории земного и марсианского районов инженеры ученые рассчитывали обнаружить формы рельефа и геологические черты, характерные для Долины Ареса. Они осмотрели район с самолета, чтобы оценить контекст и историю форм рельефа, и провели исследования на поверхности. "Интуитивное понимание, полученное при виде области "паршивых земель" как с воздуха, так и с поверхности будет существенным для интерпретации природы места посадки..." - говорит научный руководитель программы д-р Мэттью Голомбек (Matthew Golombek).
Ученые предполагают, что марсианский район посадки перекрыт 100-метровой толщей материала, вынесенного потоком. Поэтому на расстоянии всего в несколько метров от посадочного аппарата ровер "Sojourner" может обнаружить множество образцов пород и почвы различного, хотя и неизвестного, происхождения и возраста. К сожалению, "Mars Pathfinder" не будет снимать район посадки на этапе подлета, и поэтому ученым придется получать всю возможную информацию только из фотоархива "Викингов" и по снимкам, сделанным на месте.
В этом исследовании принимали участие не только работающие по проекту ученые и инженеры, но и 11 учителей начальных и средних школ. Эти преподаватели из штатов Вашингтон и Айдахо прошли специальный конкурс и планируют использовать полученный материал в своих школах.
Как посадочный аппарат, так и ровер будут оснащены стереоскопическими телесистемами, предназначенными для съемки района посадки, исследования минералогии поверхностных материалов, геологических процессов и взаимодействия атмосферы и поверхности. Ровер будет также оснащен альфа-протонным рентгеновским спектрометром APXS для анализа химического состава грунта. В состав полезной нагрузки комплекса входят также инструменты для сбора информации по размеру пылевых частиц и количестве водяного пара в атмосфере.
Новости космонавтики 1996 №3:
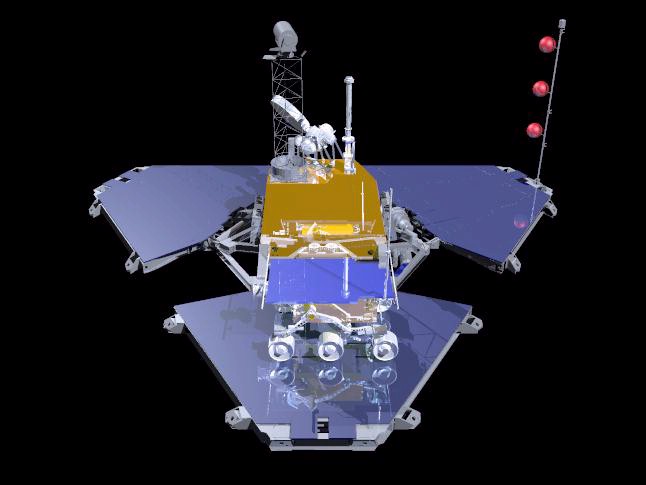
 Рис.1. АМС "Mars Pathfinder". НАСА. |
31 января. Сообщение JPL. Сегодня в "чистой комнате" сборки космических аппаратов Лаборатории реактивного движения (JPL) была выполнена установка марсохода (ровера) "Соджорнер" на посадочный аппарат АМС "Марс Пасфайндер".
Этим событием завершился годовой период испытаний компонентов посадочной системы станции, в чисто которых входят парашют диаметром 12.7 м, три малых тормозных ракетных двигателя, и огромные многополостные надувные амортизаторы.
В полетной конфигурации станция "Марс Пасфайндер" представляет собой тетраэдр высотой около 1 метра и массой 351 кг. Ровер массой 10 кг установлен на внутренней поверхности одного из трех треугольных "лепестков", которые раскрываются после посадки.
В ближайшие несколько недель будут проводиться комплексные испытания. Затем "Пасфайндер" будет заключен в лобовой теплозащитный экран, разработанный на основе экранов "Викингов", и внешнюю конструкцию. Аппарат пойдет затем на испытания в 8-метровый имитатор условий космического пространства для балансировки, акустических и термовакуумных испытаний, говорит главный инженер по летным системам Роберт Маннинг (Robert Manning). В конце лета аппарат будет разобран на части для заключительных пиротехнических и электрических испытаний. Около 1 сентября компоненты станции будут отправлены на мыс Канаверал.
"Марс Пасфайндер" должен быть запущен 2 декабря 1996 г. и приземлиться в Долине Ареса на Марсе 4 июля 1997 г. За 24 часа до посадки аппарат развернется примерно на 7°, в посадочную ориентацию. Войдя в атмосферу со скоростью более 7.5 км/с, с использованием лобового экрана станция в течение двух минут погасит скорость до 400 м/с. По данным об ускорении бортовой компьютер выдаст команду на раскрытие парашюта. Через несколько секунд будет сброшен раскаленный лобовой экран. Из-за разреженности атмосферы парашют замедлит падение станции только до 70 м/с. За несколько секунд до касания будет надут "кокон" амортизаторов и будут включены тормозные двигатели, которые уменьшат скорость до 20 м/с.
За 4 часа до рассвета по местному времени "надувной мячик" с "Пасфайндером" упадет на поверхность, попрыгает и успокоится. В течение примерно трех часов надувные емкости будут сдуваться и втягиваться, после чего станция примет штатную ориентацию и развернет "лепестки". С наступлением дня солнечные батареи дадут питание "Соджорнеру", который подготовится к работе и сойдет по одному из двух трапов на поверхность.
Основная цель этой миссии - отработка и демонстрация дешевой технологии доставки полезной нагрузки на поверхность Марса. Однако проект имеет и конкретную научную программу. Посадочный аппарат несет многоцветную изображающую стереосистему и приборы для исследования атмосферы. Большая часть его научных задач будет выполнена в течение нескольких первых часов после посадки. После этого "Пасфайндер" будет снимать панорамы поверхности, вести метеонаблюдения и обеспечивать работу ровера.
Ровер будет нести средства измерения состава пород и поверхностного материала вблизи точки посадки. Одной из первых его задач будет съемка посадочного аппарата, чтобы его конструкторы смогли оценить состояние станции, и окрестностей места посадки.
Посадочный аппарат должен проработать на Марсе не менее 30 суток, ровер - не менее 7 суток.
Новости космонавтики 1996 №10:
17 мая. И.Лисов по сообщениям JPL и "The Martian Chronicle". Полностью собранный летный экземпляр марсианской станции "Mars Pathfinder" только что успешно прошел акустические вибрационные испытания, в которых звуковые волны имитировали нагрузки, характерные для запуска.
Теперь аппарат готовится для термовакуумных испытаний в термобарокамере диаметром 7.6 м. Сначала будет отрабатываться фаза перелета (вакуум плюс нагрев ИК-светильниками, имитирующими излучение Солнца). Затем станция будет развернута в посадочную конфигурацию - с раскрытыми панелями солнечных батарей посадочного аппарата и сошедшим марсоходом, связывающимся с ним по радио, - и прогнана через нагрев и охлаждение в цикле день/ночь при "марсианском" давлении.
До, во время и после каждого в серии акустических и термовакуумных испытания проводились электрические испытания летного экземпляра, чтобы убедиться в штатной работе всех систем.
Интересно отметить, что во время двухдневной имитации работы станции на поверхности Марса (планировалась на 7-8 мая) использовался солнечный датчик студенческой команды разработчиков из колледжа Сьерра (Роклин, Калифорния). Эта группа уже в течение двух лет ведет разработку собственного миниатюрного "учебного" КА, получая финансирование от НАСА и Управления перспективных исследований и помощь от Лаборатории реактивного движения (JPL) и промышленных фирм.
Во время встречи со студентами ведущий инженер по подсистеме ориентации и управления информацией "Mars Pathfinder" д-р Данкай Лю (Dankai Liu) выяснил, что ими разработан солнечный датчик, который может быть использован в конкретном испытании станции. Студенты, которым было предложено установить свой датчик на "Mars Pathfinder" и присутствовать при испытаниях, с радостью согласились, a JPL получила искомый солнечный датчик бесплатно.
Испытание состояло в имитации наведения на Землю после посадки остронаправленной антенны AMС. Это - одно из критически важных испытаний в последние месяцы перед отправкой на космодром. Аппарат должен был найти Солнце и проследить его движение по небу. В это время группа Лю измеряла ошибки системы наведения антенны посадочного аппарата.
В августе станция будет частично разобрана и 1 сентября отправлена на Восточный испытательный полигон во Флориде для подготовки к пуску 2 декабря 1996 г.
Новости космонавтики 1996 №17:
14 августа. И.Лисов по сообщениям NASA и Рейтер. Станции "Mars Global Surveyor" (MGS) и "Mars Pathfinder" (MPF), запускаемые NASA к Марсу в астрономическое окно 1996 года, доставлены в Космический центр имени Кеннеди для предстартовой подготовки.
"Mars Pathfinder" совершил путешествие из Лаборатории реактивного движения в Пасадене на мыс Канаверал в специальном автомобиле и прибыл 13 августа в 15:00 EDT. Собственно, пока доставлены и помещены в корпус сборки SAEF-2 три основных компонента MPF из четырех - ступень обеспечения перелета, лобовой экран и посадочный аппарат. Ровер (марсоход) "Sojourner" будет доставлен авиатранспортом 23 августа.
Окончательная сборка MPF начнется с установки ровера на один из четырех "лепестков" посадочного аппарата. Когда лепестки будут закрыты, посадочный аппарат закроют лобовым экраном и будет установлена парашютная система. Собранный входящий аппарат будет затем состыкован со ступенью обеспечения перелета. Наконец, перед вывозом на старт MPF будет состыкован с 3-й ступенью РН "Дельта-2". Весь процесс сборки займет примерно 3 месяца.
21 ноября станция и 3-я ступень будут перевезены на стартовый комплекс LC-17B. После комплексных испытаний будет установлен головной обтекатель. Запуск запланирован на 2 декабря в 02:09 EST (07:09 GMT). Астрономическое окно продлится до 25 декабря.
4 июля 1997 г. MPF выполнит посадку на поверхность Марса, где доставленный станцией ровер исследует окружающие породы. Станция и ровер изучат геологию и элементный состав марсианских пород и почвы, а также атмосферу и погоду на поверхности. Работа MPF на поверхности Марса продлится примерно 1 месяц.
Как изменятся программы работы двух станций в связи с открытием возможных следов древней жизни на Марса? Какие-либо серьезные измерения за столь короткий срок невозможны, говорит один из руководителей программы Гленн Каннингэм. Тем не менее в задачи MGS включен поиск с орбиты областей, в которых потребуются дополнительные исследования в связи с этим открытием. Один из бортовых инструментов MGS в ходе перелета может быть настроен так, чтобы улучшить его способность обнаруживать минералы типа карбонатов, связанные с возможной жизнью.
Возможное открытие следов жизни на Марсе влечет за собой ужесточение требований к стерилизации посадочного аппарата "Mars Pathfinder". Они и до этого были весьма серьезными. Сейчас аппарат содержится в чистой комнате и его части регулярно протираются спиртом. Наиболее неровные поверхности предполагается "прожарить".
Тем временем в июле NASA объявило о приеме предложений от исследователей США и других стран по проведению исследований с использованием метеокомплекса ASI/MET станции MPF и прибора МОх (Mars Oxidation Experiment) станции "Марс-96" в дополнение к работам, запланированным постановщиками экспериментов.
Новости космонавтики 1996 №19:
9 сентября. С.Головков по сообщениям проекта "Mars Pathfinder". Продолжается подготовка к запуску к Марсу АМС "Mars Pathfinder", запланированному на 2 декабря 1996 г.
На посадочном аппарате ко 2 сентября было выполнено испытание EDL, после чего станция была частично разобрана для доступа к электронике. Пришлось заменить два предохранителя, несколько реле и передаточный ключ волновода. На станцию была установлена летная, полностью заряженная батарея. После этого был выполнены полные функциональные испытания - чтобы убедиться, что замененные элементы работают и ничему не мешают.
В первых числах сентября был окончательно установлен белый корпус ISA (Integrated Structure Assembly) станции с теплозащитой. Затем специалисты провели калибровку точек останова антенны высокого усиления HGA ("леденец на палочке"), расположенной рядом с камерой на ISA. Чтобы убедиться, что антенна смотрит в нужном направлении относительно посадочных "лепестков", использовались специальные теодолиты.
К 9 сентября были установлены и проверены электронные блоки подрыва пиросредств, установлены батареи термоэлементов для их питания, (Термоэлементы называются так потому, что производят электрическую энергию из генерируемого ими химическим путем тепла. Батареи работают всего несколько минут, но этого хватает для срабатывания пиросистемы введения парашюта, пироболтов, пирорезаков и т.п.)
В течение первой недели сентября была также проверена возможность загрузки в компьютер "Mars Pathfinder" больших участков программ через летную радиосистему Х-диапазона с наземной станции MIL-71 в Центре Кеннеди. Этот режим может потребоваться в маловероятном случае перезагрузки программ в электрически программируемое ПЗУ во время полета. Испытание прошло успешно.
Сделали в последний раз несколько контрольных снимков с каждого "глаза" камеры IMP на посадочном аппарате. Теперь эта камера будет работать только на Марсе.
До середины сентября планируется соединить лепестки посадочного устройства с самим аппаратом. Затем начнется длительный процесс установки летного амортизатора ("мячика") и пиротехнических устройств.
На перелетной ступени "Mars Pathfinder" установлены и проверены насосы фреона в системе теплоотвода HRS. Эта система обеспечивает циркуляцию хладагента как по периметру перелетной ступени, так и внутри посадочной ступени, чтобы создать нужный тепловой режим электроники - батарей, цифровых систем, радиопередатчика SSPA, и самого марсохода, - особенно на начальном этапе перелета вблизи Земли. Насосы, установленные летом во время термоиспытаний, пришлось заменить запасным комплектом, так как было подозрение, что они были повреждены во время одного из электроиспытаний.
Марсоход "Sojoumer" станции "Mars Pathfinder" был доставлен авиатранспортом из Лос-Анжелеса в Орландо 23 августа и оттуда в Центр Кеннеди 24 августа. Ровер был помещен в здание SAEF-2, где к 9 сентября успешно прошел первую серию испытаний. Были проверены все привода и датчики, проведено функциональное испытание альфа-протонно-рентгеновского спектрометра APXS.
Проверки связи ровера с посадочным аппаратом "Mars Pathfinder" были проведены после установки корпуса аппарата. У разработчиков оставались сомнения, нужен ли аттенюатор параллельно с антенной и модемом на посадочном аппарате, предназначенными для связи с ровером. Первоначально считалось, что аттенюатор будет нужен для связи на близком расстоянии. Проведенные испытания почти убедили разработчиков в том, что на самом деле без аттенюатора можно обойтись. Если же его снять, появится возможность отвести ровер на большее расстояние от посадочного аппарата во время дополнительного периода работы.
Затем "Sojourner" был закреплен на "своем" лепестке посадочного устройства "Mars Pathfinder" вместе со сходнями. Все готово к соединению лепестков с посадочным аппаратом и их закрытию в конце месяца, однако после завершения сборки посадочного аппарата состоятся дополнительные проверки связи.
Новости космонавтики 1996 №21:
17 октября. И.Лисов по сообщениям проекта "Mars Pathfinder". В корпусе SAEF-2 [Центра Кеннеди завершается сборка АМС Mars Pathfinder" (MPF) В конце сентября были установлены воздушные амортизаторы. Работу выполнили специалисты фирмы "ILC Dover Inc." (изготовитель амортизаторов) и Лаборатории реактивного движения (JPL).
После этого лучшие механики выполнили детальный осмотр аппарата. В частности, они предложили заделать открытый край сотовой основы солнечной батареи, чтобы ничто не могло оттуда выпасть и повредить оптику камер. Предложение было выполнено в течение двух часов.
Появились и другие замечания. Во время сборки пришлось заменить случайно поврежденный ветровой датчик на штанге МЕТ. На полностью снаряженном аппарате с амортизаторами замки панелей ("лепестков") перестали сходиться точно. Это означало, что в момент срабатывания пироболтов и освобождения лепестков после посадки болты могут застрять отверстиях и что-нибудь поцарапать выступающими концами. Пришлось слегка расширить отверстия под пироболты. Это отсрочило закрытие лепестков на пару дней - до 5 октября.
После этого MPF был вставлен (снизу) в хвостовой обтекатель, закрыт снизу лобовым теплозащитным экраном и соединен с обеими частями пироболтами. В ближайшее время аппарат будет поставлен "вверх ногами" на поворотный стол для проверки балансировки на скорости 70 об/мин. После того как главная ось инерции будет совмещена с осью симметрии, станция уже не будет вибрировать при штатной закрутке со скоростью 2 об/мин на трассе полета. Затем "Mars Pathfinder" будет перевернут вновь и установлен на перелетную ступень. А за этим последует еще одна балансировка.
Два месяца назад в запасе у работающих со станцией было две недели, сейчас - 5 суток. Специалисты проекта MPF довольны, что осталось так много.
Тем временем в Лаборатории реактивного движения "запустили" к Марсу электрический макет станции, на котором обычно отрабатывается летное программное обеспечение. Работали те же люди, та же документация, те же программы, которые будут использованы 2 декабря. Программа: проверка состояния станции и ровера, два маневра. Этот виртуальный "полет" закончится отработкой программ этапа входа, спуска и посадки EDL и - в субботу 19 октября - "первым днем на Марсе".
Рядом с оперативной зоной MPF в JPL сооружается каменно-песчаный марсодром для отработки операций с ровером на поверхности Марса.
Новости космонавтики 1996 №25:
США. Запуск и полет АМС "Mars Pathfinder"
И.Лисов по материалам NASA, JPL, АП, Рейтер, ЮПИ и электронного журнала "Live from Mars".
4 декабря 1996 г в 01:58:06 EST (06:58:06 GMT) с площадки В стартового комплекса LC-17 Станции ВВС "Мыс Канаверал" был выполнен пуск РН "Дельта-2" (вариант 7925) с американской автоматической межпланетной станцией "Mars Pathfinder" (MPF).
После первого включения двигателя второй ступени была достигнута опорная орбита с наклонением 28.7° и высотой 173x191 км. Второе включение позволило выйти на переходную орбиту высотой 175x3072 км. Здесь прошло включение двигателя "Star 48B" третьей ступени PAM-D, который придал станции необходимую отлетную скорость. Через 75 мин после запуска на высоте около 800 км над Гавайями космический аппарат отделился от 3-й ступени и вышел на траекторию перелета к Марсу. Вторая ступень выполнила затем боковой маневр выжигания остатков топлива, в результате которого наклонение ее орбиты возросло до 36.4°
Согласно сообщению Секции оперативного управления Центра космических полетов имени Годдарда NASA, космическому аппарату "Mars Pathfinder" было присвоено международное регистрационное обозначение 1996-068А. Он также получил номер 24667 в каталоге Космического командования США.
"Mars Pathfinder" должен стать первым космическим аппаратом, который выполнит посадку на поверхность Марса со времени прибытия двух американских АМС "Viking" в 1976г.
| Событие | Время от старта | Время, GMT |
| Старт | 00:00:00.000 | 06:58:07 |
| М=1 | 00:00:32.216 | 06:58:39 |
| Максимальный скоростной напор | 00:00:49.305 | 06.58:56 |
| Отключение 6 стартовых ускорителей | 00:01:03.120 | 06:59:10 |
| Включение 3 стартовых ускорителей | 00:01:05.500 | 06:59:12 |
| Отключение 3 стартовых ускорителей | 00:02:08.820 | 07:00:16 |
| Отсечка основного двигателя 1-й ступени | 00:04:20.664 | 07:02:28 |
| Отсечка верньерных двигателей | 00:04.26.664 | 07:02:34 |
| Отделение 1-й ступени | 00:04:28.664 | 07:02:36 |
| Включение двигателя 2-й ступени | 00:04:34.164 | 07:02:41 |
| Сброс обтекателя | 00:04:39.000 | 07:02:46 |
| Выключение двигателя 2-й ступени | 00:09:28372 | 07:07:35 |
| Второе включение двигателя 2-й ступени | 01:06.22.383 | 08:04:29 |
| Вход в тень | 01:0652.456 | 08.04:59 |
| Выключение двигателя 2-й ступени | 01:07:54.270 | 08:06:01 |
| Закрутка верхних ступеней | 01:08:44.270 | 08:06:51 |
| Отделение 2-й ступени | 01:08:47.360 | 08:06:54 |
| Включение двигателя 3-й ступени | 01:09.27.780 | 08:07:32 |
| Выключение двигателя 3-й ступени | 01:10:52 360 | 08:08:59 |
| Замедление вращения | 01:15:30.500 | 08:13:37 |
| Отделение 3-й ступени | 01:15:35 480 | 08:13:42 |
| Начало сеанса связи | 01:18:17.000 | 08.16:24 |
| Выход из тени | 01:37:40 819 | 08:35:48 |
 Посадочный аппарат MPF. JPL. |
Проект начинался под названием "MESUR Pathfinder". Космический аппарат задумывался как средство отработки технологических решений для будущей сети станций для исследования природной среды Марса MESUR (Mars Environment Survey Network), а потому название - "следопыт", "разведчик". В 1993 г., после потери АМС "Mars Observer", проект сети MESUR был прекращен, а технологический аппарат превратился в один из проектов программы "Discovery", которая нацелена на создание дешевых межпланетных КА для решения ограниченного количества научных задач. Создание станции MPF обошлось в 171 млн $ (в текущих ценах), марсохода - в 25 млн, запуск в 61 млн и обеспечение полета - в 14 млн.
Основная задача проекта - отработка технологии дешевой доставки посадочного аппарата с научной аппаратурой на поверхность Марса.
Станция "Mars Pathfinder" состоит из посадочного аппарата (ПА), перелетной ступени, лобового щита и хвостовой тепловой защиты и несет внутри себя марсоход. Суммарная масса КА при запуске, включая посадочный аппарат, перелетную ступень с двигательным отсеком и солнечной батареей, лобовой и хвостовой экраны, антенны среднего и высокого усиления - 890 кг. В эту величину входит около 100 кг топлива двигательного отсека перелетной ступени.
Перелетная ступень имеет форму цилиндра с диаметром 2.65 м и высотой 1.5 м. На ней расположены солнечная батарея с элементами на арсениде галлия площадью 2.5м2 (для питания станции на трассе перелета достаточно 178 Вт), восемь двигателей ориентации тягой по 1 фунту (0.45 кгс), четыре бака гидразина, солнечные и звездные датчики, унаследованные от АМС "Mars Observer" и "Magellan" соответственно. Перелетная ступень обеспечивает возможность изменения скорости аппарата на 130 м/с.
Посадочный аппарат имеет форму, близкую к тетраэдру, высотой около 0.9 м. Тетраэдр образован основанием и тремя боковыми лепестками, внутренняя поверхность которых покрыта фотоэлементами и образует солнечную батарею общей площадью 3.3м2. На основании ПА расположен блок электроники. Посадочный аппарат имеет активную систему терморегулирования с фреоном в качестве теплоносителя, причем фреон прокачивается для охлаждения по периметру перелетной ступени. До входа в атмосферу Марса ПА находится во внешнем корпусе диаметром 2.65 м, образованном лобовым теплозащитным экраном и хвостовым обтекателем.
ПА имеет интегрированную систему управления и данных AIM с управляющим компьютером RAD6000 фирмы IBM - коммерческой радиационно-защищенной одноплатной микро-ЭВМ. Компьютер имеет 32-битную архитектуру на шине VME и может выполнять более 22 млн инструкций в секунду. В его памяти объемом 128 Мбайт будут храниться технические и научные данные, в том числе информация и изображения с ровера. В электрически программируемом ПЗУ емкостью 4 Мбайт хранится летное программное обеспечение и каталог около 200 навигационных звезд, по которым определяется ориентация станции на трассе перелета.
Шестиколесный ровер "Sojourner", известный также под техническим обозначением MFEX (Microrover Flight Experiment) и неофициальным названием "Rocky IV", имеет размеры 630x480x280 мм и массу 11.5 кг. В эту величину входят алюминиевая конструкция, подвеска "Rocker-Bogie", разработанная в JPL в конце 1980-х годов, прибор APXS и средства его развертывания. В перелетном состоянии марсоход зафиксирован на внутренней стороне одного из лепестков ПА с помощью трех тросов из нержавеющей стали, которые на поверхности будут перерезаны пироножом, и занимает всего 18 см в высоту. Масса ровера вместе со средствами его крепления и развертывания на посадочном аппарате достигает 17.5 кг. Обеспечение теплового режима ровера и прием данных возложены на перелетную ступень станции.
Основой энергетики ровера является расположенная у него "на спине" солнечная батарея из 234 элементов (арсенид галлия на германии) площадью 0.22м2, которая при полуденном освещении дает 16.5 Вт при напряжении 14-18 В. Планируется, что ровер будет "ходить" только в течение 4 полуденных часов, и вырабатываемая мощность будет достаточна даже во время пылевой бури. Дополняют солнечную батарею и служат запасным источником питания три литий-тионил-хлоридные (Li/s o cl) батареи емкостью по 36 Вт-час в блоке электроники ровера. Это батареи однократного действия; они будут использоваться только для проверки состояния ровера в полете, для ночных экспериментов и работы ранним утром. Для обогрева электроники в отсеке WEB (Warm Electronics Block) размещены три радиоизотопных нагревателя - таблетки плутония массой по 2.6 г, а внешняя теплозащита обеспечивается почти невесомым кремниевым аэрогелем (20 мг/см3).
Система управления ровера основана на микропроцессоре 80С85 фирмы "Intel", выбранном из-за низкой стоимости и хорошей стойкости к одиночным радиационным повреждениям. Этот 8-битный процессор исполняет 0.1 млн инструкций в секунду. Объем оперативной памяти - 576 кбайт. Компьютер имеет массу 0.5 кг и потребляет 1.5 Вт. Система управления принимает от оператора цель движения и обеспечивает самостоятельный переход к цели и выполнение задач. Стандартная скорость перемещения ровера - 1 см/с. Кинематика шасси рассчитана на адаптацию к поверхности и преодоление препятствий, которые превышают диаметр колес (130 мм) вдвое и достигают почти такой же высоты, как и сам ровер. Клиренс ровера - 180 мм. Марсоход может подниматься по склону с крутизной 30° и обходить крупные препятствия, используя систему предотвращения столкновений с лазерным дальномером. Повороты осуществляются с помощью четырех внешних колес, причем ровер может развернуться на месте.
Ровер несет три камеры - стереосистему впереди и цветную камеру сзади - для обзора местности и навигации. Задняя камера с разрешением 1 мм будет использоваться для управления спектрометром APXS:
Научная программа имеет в этом проекте подчиненную роль. Она направлена на изучение ранней эволюции и геологической истории Марса. Посадочный аппарат и марсоход несут три основных прибора, с помощью которых исследователи планируют понять:
- морфологию поверхности и геологию в масштабе сантиметров и метров (грунт, породы, холмы, их размер и распределение на поверхности);
- состав и минералогию пород, фунта и поверхностных материалов;
- базовую механику грунта (когезия, угол внутреннего трения и проскальзывания) и магнитные свойства марсианской пыли;
- структуру марсианской атмосферы;
- погоду на поверхности Марса, суточные и сезонные вариации;
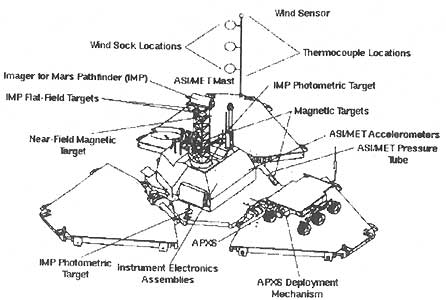
- внутреннее строение планеты. Камера посадочного аппарата IMP (Imager for Mars Pathfinder) располагается в цилиндрическом корпусе на вершине выдвижной мачты посадочного аппарата высотой 1.5 м. Камера имеет двухосную систему наведения с шаговыми двигателями, обеспечивающую перемещение на +/-178° по азимуту и от -72 до +83° по углу места. Камера имеет два оптических пути для стереоскопической съемки; активная настройка на фокус не требуется. В каждом пути оптической системы работает колесо с 12 оптическими фильтрами в диапазоне 0.35-1.1 мкм. Четыре пары фильтров предназначены для изучения атмосферы и регистрации водяного пара, две - для стереосъемки, 11 фильтров оптимизированы для задач геологии Марса, в частности, для выявления железа и пироксенов, и один имеет линзу для съемки магнитных пылевых частиц1. С помощью фильтров может формироваться цветное изображение.
1В различных источниках приводятся существенно разные перечни фильтров.
Поле зрения камеры составляет 14.4° как по горизонтали, так и по вертикали. Фокальная плоскость и электроника IMP являются почти точной копией соответствующих компонентов спектрорадиометра DISR зонда "Huygens" станции "Cassini". Каждая половинка поля зрения проецируется на ПЗС-матрицу размером 256x256 пикселов, с которых раз в две секунды снимается изображение. Разрешение на поверхности вблизи аппарата составит 0.6 мм. Камера разработана в Университете штата Аризона с участием компании "Lockheed Martin", германских и датских университетов. Научный руководитель группы изображений - д-р Питер Смит.
Вторым прибором посадочного аппарата является комплекс ASI/MET (Atmospheric Structure Instrument/Meteorology Package), предназначенный для изучения параметров атмосферы и метеообстановки. Акселерометры ПА, входящие в состав атмосферного комплекса, будут измерять ускорение станции по трем осям в верхней атмосфере планеты на этапе спуска, что позволит получить профили давления, температуры и плотности. Температура и давление будут измеряться на этапе спуска и непосредственно. На поверхности после посадки будут регистрироваться температура, давление, прозрачность атмосферы и скорость ветра. Инструмент разработан в JPL на основе опыта "Викингов"; работами руководит д-р Элвин Сейфф из Государственного университета Сан-Хосе.
С изображающим комплексом IMP и метеокомплексом МЕТ связаны несколько дополнительных экспериментов. Так, два магнита различной силы, расположенные на лепестках ПА, будут собирать магнитные пылевые частицы размером до 100 мкм, которые затем будут сниматься камерой IMP, а также исследоваться спектрометром APXS ровера. Скорость ветра на высотах до 1 м будет определяться как по показаниям ветрового датчика, так и в результате съемки положения трех алюминиевых ветровых "колбас". Ветровой датчик расположен на вершине штанги, основание которой находится в вершине одного из лепестков. Термопары и "колбаски" размещены на штанге на разной высоте, что позволяет получать профили температуры и скорости ветра на высоту до 1 м. Спектральные наблюдения Солнца, Фобоса и неба с помощью IMP позволят вычислять размер и форму аэрозольных и пылевых частиц, их распределение по высоте и количество водяного пара.
Посадочный аппарат несет антенны высокого (HGA) и низкого (LGA) усиления. Передача через HGA с поверхности Марса может осуществляться со скоростью до 6 кбит/с. Регулярное радиослежение за ПА с измерением расстояния до него с точностью до 1-5 м позволит точнее определить положение полюса Марса и его прецессию и обнаружить изменения за 20 лет после работы ПА "Викингов". По прецессии может быть определен момент инерции планеты. Таким образом, после нескольких месяцев измерений можно подтвердить или отвергнуть теории о внутреннем строении Марса, в том числе о наличии металлического ядра и собственного магнитного поля.
Альфа-протонно-рентгеновский спектрометр (APXS) ровера является копией аналогичного прибора, устанавливавшегося на АМС "Вега", "Фобос" и "Марс-96", и предназначен для изучения элементного состава пород и грунта. Спектрометр должен контактировать с исследуемым образцом, для чего предусмотрен механизм развертывания с максимальным отклонением до 20°. Аналитический процесс основан на трех механизмах взаимодействия излучаемых альфа-частиц заданной энергии с веществом: упругое рассеяние, излучение протонов и рентгеновских лучей. Сбор данных хотя бы по одному образцу будет продолжаться 10 часов. Прибор способен определить количества большинства элементов, кроме водорода (легких - по рассеянию и протонному излучению, тяжелых - по рентгеновскому) Альфа- и протонная части инструмента изготовлены в Институте Макса Планка (Германия), а рентгеновская - в Чикагском университете, Научный руководитель - д-р Рудольф Ридер.
| Табл.2. Масса и энергопотребление научной аппаратуры
|
Исследователи Центра Льюиса подготовили эксперименты по определению количества оседающей марсианской пыли и ее прозрачности (МАЕ - Materials Adherence Experiment), по определению характеристик грунта по износу поверхностей колес ровера (WAE - Wheel Abrasion Experiment), и ввели в конструкцию точки разряда для сброса статического электрического заряда, если таковой будет накапливаться.
"Mars Pathfinder" был запущен почти через месяц после американской станции "Mars Global Surveyor", но направлен по относительно быстрой трассе. Во время перелета запланированы четыре коррекции. Пройдя 500 млн км, станция достигнет Марса 4 июля 1997 г. (Предварительные расчеты баллистиков показывали, что дата прилета будет в начале июля. Раз так, почему не выбрать для нее дату национального праздника? Двухсуточная задержка пуска была скомпенсирована более высокой отлетной скоростью.)
4 июля Землю и Марс будет разделять 203 млн км. Посадочный аппарат станции должен десантироваться в районе долины Ареса, в точке с координатами 19.5°с.ш., 32.8°з.д., в 850 км юго-восточнее точки посадки КА "Viking Г. Эллипс рассеяния имеет размер 100x200 км. Точка посадки была выбрана исходя из следующих условий: в экваториальной зоне, чтобы обеспечить питание от солнечных батарей, в достаточно низком месте, чтобы сработала парашютная система, и в районе, интересном с точки зрения геологии (устье бывшего водного потока, куда могло принести различный материал).
За 24 часа до подлета станция будет развернута примерно на 7° и примет ориентацию для входа. За 30 мин до входа в атмосферу аппарат сбросит свою перелетную ступень, обеспечившую прибытие к Марсу. Войдя в атмосферу непосредственно с траектории подлета со скоростью 7.6 км/с под углом 14.2°, аппарат массой около 570 кг выполнит торможение с помощью лобового тормозного щита, сходного с использованными "Викингами". Входящий аппарат будет стабилизирован вращением со скоростью 2 об/мин. На этапе спуска, начиная с высоты 100 км и до поверхности, будет вестись запись научной информации с частотой, определяемой скоростью спуска. Максимальная перегрузка в 25g будет достигнута на высоте 32 км; за две минуты скорость спуска уменьшится до 360-450 м/с - двойной скорости звука.
На высоте 6-11 км командой бортового компьютера по данным от акселерометров будет введен парашют диаметром 11.5 м; через 20 сек произойдет сброс лобового экрана, причем аппарат будет подвешен под хвостовым обтекателем на 20-метровом тросе. Использование парашюта в разреженной атмосфере Марса дает снижение скорости только до 50-60 м/с. Радиолокационный высотомер начинает работать на высоте около 1.5 км за 32 сек до посадки. По сигналу от высотомера на высоте 300 м с помощью пороховых газогенераторов в течение 1 сек будут надуты четыре посадочных амортизатора, которые смягчат касание. Каждый амортизатор состоит из 6 сфер диаметром 0.9 м, изготовленных из герметичного "мешка" и высокопрочного материала вектран. Диаметр сферы, описанной вокруг всех амортизаторов - 5.25 м. За 4 сек до удара о поверхность на высоте 50-70 м сработают три твердотопливных двигателя "Star 5" системы замедления RAD на хвостовом обтекателе, которые снизят скорость до менее 20 м/с. В процессе работы двигателей трос между аппаратом и хвостовым обтекателем будет перерезан, и аппарат упадет с высоты 12-18 м, причем перегрузка при ударе достигает 40g.
Аппарат будет прыгать на амортизаторах около 2 минут. Первый прыжок будет иметь примерно 12 м в высоту, а всего их может случиться с десяток. Примерно через час амортизаторы сдуются и частично уберутся в корпус при помощи микролебедок и высокопрочных тросов, и по истечении трех часов после посадки ПА с помощью лепестков примет правильное вертикальное положение и выдвинет мачту с камерой IMP. Масса аппарата после посадки будет около 360 кг, включая механизм раскрытия и выпрямления, кабельную сеть и электронику, научную аппаратуру и ровер. На поверхности посадочный аппарат имеет 2.75 м в диаметре.
Подсолнечная точка в это время года находится на 15°с.ш., поэтому в полдень Солнце будет стоять почти прямо "над головой". Солнечные батареи посадочного аппарата обеспечивают заряд 850 Вт-час в ясные дни и половину этого количества, когда Солнце затенено пылью. Посадочный аппарат расходует 100 Вт-час в день; ночью заряд хранится в серебряно-цинковых аккумуляторах емкостью 40 А-час.
Первой задачей посадочного аппарата будет передача технической информации и научных данных, записанных на этапе спуска в атмосфере. Затем камера IMP сделает несколько круговых панорамных снимков района посадки. После этого посадочный аппарат будет использоваться главным образом для измерений состояния атмосферы и грунта и для обеспечения работы ровера. Для этого на посадочном аппарате установлен УВЧ-модем и обеспечивающая аппаратура общей массой 4.5 кг. Тем не менее отдельные области ландшафта могут сниматься и позже, а с помощью спектрозональной съемки будут определяться образцы для изучения с ровера.
Ровер "Sojourner" доставляется со сложенными шасси, системой перемещения и колесами на одном из посадочных лепестков станции. После того как солнечная батарея ровера будет выставлена на Солнце, ровер получит питание, зарядит аккумуляторы, выпрямится и в первый же день по команде с Земли (основной "водитель" - Брайан Купер, разрабатывающий системы и программы для роверов в JPL в течение 11 лет) сойдет с посадочного лепестка по одной из двух рамп. Помимо анализа пород комплексом APXS, в задачи ровера входят съемка посадочного аппарата ("Sojourner" должен сделать три черно-белых снимка ПА с разных направлений, чтобы изучить возможный ущерб от приземления), окрестностей, собственных следов, испытания на проходимость, тепловой режим и работу датчиков. Производя съемку объектов на поверхности,
 Так представил выполнение научной программы MPF на поверхности Марса художник из JPL |
Посадочный аппарат и ровер должны исследовать геологию и элементный состав скальных пород и грунта в радиусе нескольких десятков метров от точки посадки, состав атмосферы и погоду. На небольшом пространстве ученые ожидают найти множество образцов разного возраста и происхождения. Район должен быть сложен гладкими слоями отложений, сквозь которые проступают несколько крупных горок и небольших вторичных кратеров. Предполагается, что область посадки будет иметь такое же количество камней, как и точки посадки КА "Viking", но меньше пыли.
MPF должен проработать на поверхности около 30 местных суток; чтобы сократить расходы на проект, наиболее важные результаты должны быть получены в течение первых нескольких дней. Рассматривается возможность продления работы посадочного аппарата на срок до 1 года Расчетная продолжительность работы ровера 7 суток с удалением от посадочного аппарата на 10 м, но он может проработать до 30 суток и отходить на большие расстояния. Одна из дополнительных задач в случае продления работы - изучение характеристик солнечных батарей в пылевых условиях и работы электроники. Официальная дата завершения проекта, включая наземную обработку данных - сентябрь 1998 г.
Проектом руководят менеджер от JPL Энтони Спиэр, научный руководитель д-р Мэт-тью Голомбек, менеджер ровера д-р Джейкоб Матиевич. В работах участвовали исследовательские центры имени Эймса, Льюиса и Лэнгли, университеты и промышленные фирмы. Опыт полета MPF будет использован при разработке будущих посадочных станций и марсоходов.
Как мы уже сообщали, "Mars Pathfinder", изготовленный в Лаборатории реактивного движения (JPL), был доставлен в Космический центр имени Кеннеди 13 августа, a "Sojourner" - 24 августа. Автономные испытания посадочного аппарата и ровера под руководством Гая Бейтелшиса прошли в течение сентября и первых чисел октября. Всякие были неприятности - например, перезагрузка компьютера как раз перед отделением посадочного аппарата с полным срывом спуска. После испытаний ровер был установлен в транспортное положение на один из лепестков посадочного аппарата, поверхности с фотоэлементами покрыты защитной
 Установка ровера "Sojourner" на посадочный аппарат. JPL |
В отличие от КА "Mars Global Surveyor", который будет работать на орбите спутника Марса, "Mars Pathfinder" был подвергнут достаточно тщательной обработке, чтобы не занести на Марс споры земных микроорганизмов. Необходимость таких мер основана на предположении, что своя собственная жизнь на Марсе есть. Если это так, было бы непростительной ошибкой занести туда земную жизнь и дать ей вытеснить местную.
Во время испытаний аппарат находился в хирургически-чистых условиях. Его поверхности периодически протирались спиртом. Некоторые наиболее сложные части станции были подвергнуты тепловой стерилизации в печах в течение 50 час при 110°С. Конечно, войну "до последнего микроба" выиграть нельзя, но NASA установило предельно допустимый уровень в 300 бактериальных спор на квадратный метр и 10000 на весь космический аппарат. (В чайной ложке почвы их - миллион.)
Предполагается, что споры земных микроорганизмов могут выжить на поверхности Марса, но не могут размножаться. Начиная с 1992 г., требование полной стерилизации направляемых на Марс аппаратов было снято. Сейчас рекомендуется ограничивать число микроорганизмов уровнем, при котором они не смогут загрязнить образцы, не допускать быстрого падения на Марса нестерилизованных орбитальных аппаратов и столкновения верхних ступеней РН с Марсом.
В октябре на станции было обнаружено ЧП. При осмотре станции выяснилось, что тонкие проводники ветрового датчика прибора ASI/MET (Atmospheric Structural Instrument/ Meteorology Experiment) порваны в нескольких местах. (Проводники, обдуваемые ветром, охлаждаются, что изменяет их электрическое сопротивление. По падению напряжения на проводнике рассчитывается скорость ветра.) Кто и при каких обстоятельствах повредил инструмент, который предназначен для измерения скорости и направления ветра на поверхности Марса, установить не удалось - но его надо было спасать, и на это оставались только выходные 12-13 октября. После этого посадочный аппарат должны были упаковать в тепловую защиту.
Ведущий инженер по инструменту ASI/MET Колин Махони и Джина Аллеруззо, которая собирала этот прибор, срочно вылетели из Калифорнии во Флориду с запасным датчиком и мотком тонкой проволоки (0.08 мм). На месте обнаружилось, что лепестки посадочного устройства уже сведены и между ними остается всего 15-20 см для работы. В то же время для того, чтобы снять лепестки, затем вертикальную штангу с инструментом, выполнить ремонт и снова все собрать, потребовалось бы две недели. С помощью микроскопа Аллеруззо нашла место обрыва и в течение часа сумела заменить порванный провод. Эксперимент был спасен, а исполнительницу поздравили менеджер проекта Э.Спиэр и менеджер всей марсианской программы Донна Ширли.
16 октября посадочный аппарат был закрыт лобовой и хвостовой теплозащитой, 18-21 октября прошел балансировку, и 22 октября был состыкован с перелетной ступенью. Были проведены испытания перелетной ступени, в частности, проверка знака (когда звезды движутся в поле зрения датчика слева направо, программа должна сообщать именно о таком, а не об обратном движении) и тестовое включение двигателя №1 на азоте.
4 ноября в четыре бака двигательной установки MPF был заправлен гидразин. На следующий день полностью собранный аппарат был вновь балансирован. Третья твердотопливная ступень РН "Дельта-2" стабилизируется вращением со скоростью 70 об/мин. Неправильно балансированный аппарат может вызвать раскачивание и ошибку в величине и направлении импульса. Была проведена проверка средств связи в сеансе с аппаратом. На борт записали последнюю версию летного программного обеспечения.
Наконец, станция была поднята краном и поставлена на третью ступень. 21 ноября после завершения последних проверок "Mars Pathfinder" и третья ступень были доставлены в транспортном контейнере на стартовый комплекс LC-17B и пристыкованы к ракете-носителю. Еще одна проверка КА показала, что транспортировка ему не повредила.
30 ноября после предстартовой пресс-конференции в Центре Кеннеди корреспондентам предоставили возможность осмотреть один из вариантов ровера и даже поуправлять им.
Запуск станции был возможен в течение 24 суток, начиная со 2 декабря, в один фиксированный момент в течение каждого дня с допустимой задержкой не более минуты. Запуск был первоначально назначен на 2 декабря в 02:09:11 EST. В этот день старт не состоялся из-за прохождения холодного фронта, который принес сильный ветер, плотную облачность и дождь. В восемь утра 1 декабря запуск был перенесен на 3 декабря в 02:03 EST.
3 декабря сначала нехорош был ветер на высоте. Метеослужба полигона подняла четыре аэростата, и лишь последний показал, что ветер стал лучше. Тем временем "отстал от событий" наземный компьютер, обрабатывающий телеметрию с двигательной установки 1-й ступени ракеты. Переключились на резервный компьютер - за две минуты до запуска отказал и он. Отбой был дан за 1 мин 33 сек до расчетного времени старта. Разочарованные участники проекта и учителя и школьники, приглашенные на запуск, разошлись спать, CNN прекратила прямой репортаж. Утром NASA объявило, что запуск перенесен на 4 декабря.
4 декабря. Холодно. Ржаво-оранжевая Луна висит на востоке, левее и выше ее - Марс. Яркая вспышка, светло как днем. Ракета уходит, целясь точно в Луну. На полпути отлетают и, сверкая, падают шесть стартовых ускорителей. Пятно света темнеет и пропадает вдали. Запустили!
В этот день "Дельта-2" отработала безукоризненно и вывела станцию на трассу перелета с отклонениями в пределах допустимых. Два грузика, выведенные в стороны с 3-й ступени, замедлили ее вращение до 12 об/мин. 34-метровая антенна станции Сети дальней связи DSN в Голдстоуне (Калифорния) приняла сигнал с AMС в диапазоне 8 ГГц по графику, примерно через 5 мин после отделения после 3-й ступени PH. "Mars Pathfinder" вышел из тени через 98 мин после запуска, пошло питание с солнечных батарей. К 20:00 GMT "Pathfinder" удалялся от Земли со скоростью 3.9 км/с.
4 декабря. Итак, "Mars Pathfinder" вышел на связь, передавая телеметрические данные сначала со скоростью 40, а затем 1185 бит/с. Вскоре группа управления установила, что все критические системы - энергопитания, терморегулирования, ориентации - работают хорошо. Все температуры на борту, все давления в двигательной установке были в норме. Выходная мощность солнечных батарей оказалась на 10% выше ожидаемой. Единственным замечанием был низкий выход по напряжению с основного солнечного датчика. Тем не менее сигнал был осмысленным - как по навигационным данным, так и по показаниям датчика получалось, что станция идет в расчетной ориентации, вращаясь со скоростью 12 об/мин вокруг оси, отклоненной на 26° от Солнца. На станции имеется резервный солнечный датчик, но, по-видимому, можно будет использовать и основной.
6 декабря. "Mars Pathfinder" работает нормально, за исключением солнечного датчика. Температура посадочного аппарата и его электроники, солнечной батареи, двигательного отсека и его электроники находится в заданных пределах. В настоящее время работают две из четырех секции солнечной батареи, дающие около 250 Вт. Аккумуляторная батарея заряжена до 75% максимальной емкости, ее температура 9°С при наилучшей устойчивой температуре 8°С. Телекоммуникационная система работает хорошо и, по-видимому, ее можно будет использовать на больших скоростях передачи, чем предусмотрено заданием.
Группа управления в JPL продолжает исследование проблемы с солнечным датчиком. Установлено, что датчик дает адекватные данные, хотя и с меньшим уровнем выходного напряжения, чем положено. Поэтому решено внести изменения в программу обработки, пересчитывающие выходной сигнал к нормальному уровню и позволяющие системе управления использовать их. Изменения уже запрограммированы и проверяются на наземном аналоге станции. После того как будет подтверждена возможность автономного расчета ориентации, скорость вращения станции будет снижена до 2 об/мин.
По состоянию на 20:00 GMT, "Mars Pathfinder" находился в 750000 км от Земли и удалялся со скоростью 3.3 км/с. Ось вращения станции отклонена на 55° от направления на Землю и на 25° - от направления на Солнце. Поскольку антенна не направлена точно на Землю, группа управления имеет возможность наблюдать ее движение и знает, что станция вращается со скоростью 12.3 об/мин.
Первая коррекция орбиты запланирована на 4 января. Если эта дата не будет изменена, расчетное приращение скорости составит 29.5 м/с.
10 декабря. Полет станции "Mars Pathfinder" проходит нормально. Температура и энергопотребление посадочного аппарата и перелетного блока остаются в заданных пределах.
Единственная проблема связана с солнечными датчиками. Станция имеет пять чувствительных элементов - два установлены вдоль оси вращения аппарата, а три равномерно размещены по окружности перелетного блока и смотрят под 105° к оси. Три периферийных датчика (№1, 2 и 3) работают отлично. Из двух осевых датчиков один (№4) затемнен или загрязнен до такого состояния, что не может быть использован, а у второго (№5) - низкий выходной уровень.
В субботу 7 декабря группа управления отправила на станцию измененное программное обеспечение, позволяющее обрабатывать данные датчика №5. После этого система ориентации станции стала нормально вычислять текущую ориентацию.
Группа управления подготовила разворот оси вращения станции, которая отклонилась от направления на Землю уже на 58° и позволяла использовать антенну лишь на пределе ее возможностей. Так как это было первое использование двигательного отсека станции в полете, было решено сделать два отдельных разворота. При первом опытном повороте ось должна быть повернута на 2°, и если все пройдет нормально, через полчаса будет выполнен второй разворот на 20°.
9 декабря развороты были успешно выполнены. В новой ориентации ось вращения станции отклонена на 44° от Солнца и на 37° от Земли, что позволяет использовать для связи скорость 1185 бит/с.
По состоянию на 10 декабря станция находится в 1.8 млн км от Земли и движется с относительной скоростью 3.2 км/с.
Новости космонавтики 1996 №26:
18 декабря. 11 декабря было проведено замедление вращения станции с 12.3 до 2 об/мин. Группа управления дала станции команды развернуться на угол 50° от направления на Солнце и 32° от направления на Землю. Это позволило им использовать все четыре работоспособных солнечных датчика. Замедление вращения проводилось ступеньками по 2 об/мин.
12 декабря был введен в работу звездный датчик. Это сканирующее устройство позволяет компьютеру управления ориентацией и информацией AIM (Attitude and Information Management) станции автономно определять свою ориентацию в пространстве относительно трех осей. Это - нормальный полетный режим, и именно в нем выполняются все коррекции.
Солнечный датчик №5 после внесения изменений в программное обеспечение работает нормально. Группа управления продолжает исследовать причины неработоспособности датчика №4, и надеется прийти к определенным выводам через 1-2 месяца.
16 декабря руководитель полета "Mars Pathfinder" Дейв Груэл провел проверку состояния научных приборов посадочного аппарата, в частности, атмосферно-метеорологического комплекса ASI/MET и камеры. Показания датчиков температуры и давления и акселерометров, входящих в состав ASI/MET, были нормальными. Мощность и ток от камеры, в то время как она снимала темноту вокруг нее, также подтвердили ее исправность.
17 декабря марсоход "Sojourner", установленный на станции "Mars Pathfinder", получил сигнал "пробуждения" от группы управления в Лаборатории реактивного движения. По этому сигналу ровер провел самоконтроль и передал через посадочной аппарат его результаты на Землю. К радости управленцев, ровер оказался полностью исправен. Был также опробован и тоже оказался в норме основной научный прибор ровера - альфа-протон-рентгеновский спектрометр APXS.
Тепловой режим и энергопотребление посадочного аппарата и перелетной ступени остается на нормальном уровне. Таким образом, двухнедельный период первоначальной проверки закончен, и станция полностью проверена и готова к семимесячному перелету по трассе Земля-Марс. Следующее большое событие - это коррекция траектории ТСМ-1, запланированная на 4 января.
31 декабря. 27 декабря был успешно выполнен первый разворот станции с совместным использованием звездного и солнечных датчиков. Ось вращения была развернута примерно на 43°, главным образом из плоскости эклиптики. В ее новом положении ось отстоит на 35° от направлений как на Солнце, так и на Землю.
Коррекция, запланированная на вечер 3 января, будет проводиться именно в этой ориентации. Маневр полностью отработан на технологическом аппарате. Из-за отличной точности выведения станции на эту коррекцию, самую большую по выдаваемому импульсу, потребуется менее 25% из 93 кг гидразина, имеющегося на борту. Коррекция продлится около 2 часов и повлечет приращение скорости около 30 м/с, хотя при пред стартовых расчетах закладывалась величина 75 м/с.
30 декабря была проведена вторая успешная проверка ASI/MЕТ, в которой проверялся датчик давления
По состоянию на 31 декабря "Mars Pathfinder" удалился от Земли на 7.2 млн км и движется с гелиоцентрической скоростью 32.6 км/с. Все системы КА работают нормально.
Что будет дальше? После ТСМ-1 работа с аппаратом перейдет в более спокойный "режим наблюдения". Количество сеансов связи снизится с 3 в сутки до 3 в неделю, главным образом через 34-метровые антенны. В этот период основная работа - разработка программы полета и командных последовательностей, которые будут загружаться на борт в среднем раз в четыре недели. На подготовку и проверку таких последовательностей требуется 14 дней.
В ходе перелета будут проведены еще две коррекции - ТСМ-2 в начале февраля и ТСМ-3 в начале мая. Первая потребует приращения скорости порядка 10 м/с, вторая - менее 1 м/с.
За 45 суток до входа в атмосферу (т.е. 20 мая) возобновляется слежение за станцией в режиме три сеанса в сутки. За 30 суток выполняется заключительная проверка состояния приборов станции и ровера. Четвертый и последний маневр (ОТМ-4) с приращением скорости менее 0.5 м/с будет проведен 24 июня. За 5 суток до прибытия станция разворачивается в ориентацию для входа в атмосферу, и двигатели ориентации по каналу крена увеличивают скорость вращения КА с 2 до 10 об/мин. Перелет заканчивается и начинается этап входа, спуска, посадки и операций на поверхности. В последние сутки навигационная грузла регулярно проводит определения орбиты, по которым уточняется время открытия парашюта. В случае необходимости может быть выполнена еще одна коррекция. Последнее уточнение делается за 6 часов до входа в атмосферу.
Новости космонавтики 1997 №1:
2 января. Первая коррекция траектории MPF, планировавшаяся на вечер 3 января, отложена на неделю. В процессе проверки данных для маневра ТСМ-1 с использованием детальных моделей КА и звездных датчиков было обнаружено, что из-за частичного затемнения солнечных датчиков, произошедшего вскоре после запуска, во время работы двигателей программа управления ориентацией получит неверные данные об ориентации, что вызовет ненужные включения двигателей по каналу крена.
Хотя это никоим образом не опасно для КА, группа управления предпочитает не включать двигатели тогда, когда это не абсолютно необходимо. Чтобы избежать лишних включений, было необходимо изменить один параметр в летном ПО, чтобы частично заблокировать данные с некондиционного солнечного датчика. К сожалению, до маневра оставалось слишком мало времени на внесение изменения, и его пришлось отложить до 9 января.
С 3 января работа с MPF вернулась к нормальному графику.
В настоящее время планируются следующие коррекции траектории MPF (L - дата старта, М - дата прибытия к Марсу):
| Обо- знач. | Дата выполнен. | dV, м/с | Цель |
| ТСМ-1 | L+37сут, 10.01.1997 | 33.3 | Устр преднамер. отклон. траектории и исправл ошибок выведения |
| ТСМ-2 | L+60 сут, 04.02.1997 | 2.08 | Исправл. погреши. коррекции ТСМ-1 |
| ТСМ-3 | М-60 сут, 07.05.1997 | 0.432 | Прицел. в точку входа в атмосф. Марса |
| ТСМ-4 | М-10 сут, 24.06.1997 | 0.138 | Исправл. погрешностей ТСМ-3 |
04.07.1997 | 0.2...2.0 | Исправл. всех возможных погрешн. |
Для подготовки коррекции требуется около пяти рабочих дней.
При разработке баллистического плана полета MPF учитывались следующие соображения. Правила NASA требуют, во-первых, чтобы вероятность падения на Марс нестерилизованной верхней ступени РН не превышала 0.0001. Это условие выполняется за счет преднамеренного отклонения траектории выведения АМС от траектории попадания на соответствующую величину. Для ликвидации указанного отклонения и служит главным образом коррекция ТСМ-1.
Во-вторых, вероятность падения самой станции на Марс со скоростью выше 300 м/с не должна превышать 0.001. Это условие выполняется за счет выбора траекторий после ТСМ-1 и ТСМ-2 такими, что даже в случае потери управления после ТСМ-2 и несрабатывания парашютной системы станция сможет замедлиться в атмосфере до приемлемой скорости. Однако чтобы обеспечить заданные условия входа, после этого требуется коррекция ТСМ-3. Наконец, погрешности при проведении ТСМ-1 и ТСМ-3 устраняются малыми коррекциями ТСМ-2 и ТСМ-4. В случае, если маневр ТСМ-4 приведет к выходу станции из заданного коридора, будет проведена аварийная коррекция ТСМ-5 с тем из заранее рассчитанных приращений скорости которое наилучшим образом отвечает реальной ситуации.
10 января. Изменения в летное программное обеспечение управлением ориентации станции были внесены утром 8 января. Вслед за этим станция выполнила разворот в положение для коррекции, продольной осью вдоль направления импульса.
Для определения параметров орбиты станции и подготовки маневра ТСМ-1 были использованы 6952 измерения дальности и 26605 допплеровских измерений, выполненных в период до 1 января 1997 г. Расчетное приращение скорости станции было 31.23 м/с. Коррекция планировалась на 9 января в 18:00 PST (10 января в 02:00 GMT), однако из-за проблем с аппаратурой станции DSN в Мадриде была несколько отсрочена. Выдача импульса проводилась двумя из восьми двигателей станции с тягой по 1 фунту (4.45 Н), которые проработали около 90 мин 9 января в 19:40 PST (10 января в 03:40 GMT) первая и самая крупная коррекция траектории ТСМ-1 станции "Mars Pathfinder" была выполнена. Данные допплеровских измерений показали, что маневр прошел успешно, однако изменение скорости MPF составило 30.09 м/с, на 3.6% меньше расчетной. Направление выдачи импульса отклонилось от заданного менее чем на 0.1°.
9 января в 22:18 PST (06:18 GMT) операторы вновь развернули станцию на угол 35° к Земле, чтобы радионавигация могла проводиться более успешно. MPF останется в такой ориентации до следующей коррекции, запланированной на начало февраля.
На следующую неделю запланирована проверка работоспособности научных инструментов станции. Будет также включен в параллельную работу с основным запасной насос системы отвода тепла. Насосы прокачивают фреон по периметру перелетной ступени, что позволяет охлаждать электронику посадочного аппарата и ровера.
Все подсистемы КА работают нормально. По состоянию на 10 января станция находилась в 10 млн км от Земли.
Новости космонавтики 1997 №2:
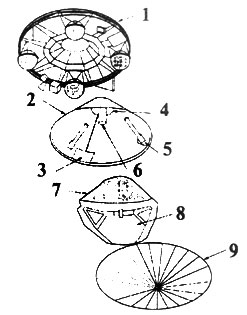 Схема АМС "Mars Pathfinder". 1 - перелетная ступень; 2 - хвостовой обтекатель; 3 - электронный блок управления пиросредствами; 4 - переходник; 5 - твердотопливные двигатели (3 шт.); 6 - парашютный контейнер; 7 - лепестки посадочного устройства; 8 - воздушные амортизаторы (сложены); 9 - лобовой экран. JPL |
24 января. В последние дни на станции "Mars Pathfinder" произошли два сбоя, к счастью, окончившиеся благополучно.
19 января произошло нарушение работы системы ориентации MPF. При вычислении ковариационной матрицы внезапно были получены значения, на несколько порядков превышающие нормальные. В результате программное обеспечение системы ориентации было перезапущено, а электроника приводов двигателей ориентации отключена. Анализ телеметрии до и после отказа не позволил установить однозначную причину. Группа управления запланировала дополнительные диагностические тесты на предмет нарушений в памяти компьютера и ПО в результате случайных сбоев, а также проверку расходимости численных методов матобеспечения.
20 января произошла серьезная неприятность с блоком детектора команд CDU - блок перешел в состояние "занято" в момент, когда никакая передача на аппарат не велась. Как и ожидалось, после начала передачи занятое состояние было сброшено, но причины "самозанятости" блока необходимо понять и устранить. Еще в двух случаях приемная аппаратура станции проигнорировала отправленную ей команду без видимых причин. Не исключена возможность сбоев, вызванных солнечной вспышкой. Для анализа ситуации создана специальная группа.
Станция удалилась от Земли на 14 млн км.
Продолжается планирование операций на этапах посадки и работы на поверхности. Группа ровера успешно закончила проверку готовности к работе. 27-28 января планируется тест готовности к работам на поверхности в полном объеме.
Новости космонавтики 1997 №3:
31 января. Станция MPF находится в отличном состоянии и удалилась от Земли на 16 млн км.
В течение прошедшей недели были успешно закончены испытания конволюционного кода с параметрами К=15, R=1/6. Кроме того, была найдена причина сбоя в программном обеспечении управления ориентацией, выявленного на прошедшей неделе. ПО управления ориентацией вновь задействовано и работает нормально.
Установлено, что источником шума, отмеченного во время проверки аппаратуры ASI/MET, является электроника приводов двигательной установки PDE. Поскольку PDE находится на перелетной ступени, помехи с ее стороны не скажутся на работе ASI/MET на поверхности.
27-28 января была проведена тренировка по оперативной готовности к двум первым дням ("солам") работы на поверхности Марса. Тренировка оказалась успешной в том смысле, что имитаторы посадочного аппарата и марсохода выполнили командные последовательности. При этом, однако, выявилось много мелких проблем, для устранения каждой из которых предложены необходимые меры.
4 февраля. Вчера в 17:00 PST (4 февраля в 01:00 GMT) была успешно закончена коррекция ТСМ-2, основной задачей которой было исправление погрешности выполненной 9 января коррекции ТСМ-1.
Станция была развернута в расчетное положение для маневра 31 января. ТСМ-2 проводилась в течение двух часов в два этапа. На первом, около 15:00 PST (здесь и далее приводятся расчетные времена и скорости), два передних двигателя станции непрерывно работали в течение 295 сек и изменили продольную составляющую скорости на 1.59 м/с. На втором этапе аппарату придавалась скорость 0.01 м/с в боковом направлении. Для этого в 16:21 PST аппарат выдал в течение 60 секунд серию 5-секундных импульсов всеми четырьмя двигателями, расположенными на одной из его сторон. Такой режим маневрирования будет использоваться для всех последующих коррекций. Предварительные данные слежения за станцией Сетью дальней связи показывают, что оба этапа были выполнены успешно.
После маневра, к 17:00 PST, ось вращения станции была повернута на 15° в сторону Земли, чтобы проводить радионавигацию более эффективно. Теперь ось вращения КА отстоит на 5° от направления на Землю и на 2° от направления на Солнце. В этой ориентации MPF будет находиться до конца марта.
В течение 2-3 месяцев MPF будет работать в относительно спокойной обстановке. Группа управления интенсивно работает над завершением планирования входа в атмосферу и операций на поверхности.
Коррекция ТСМ-3 запланирована на 5 мая. После нее станция будет находиться на траектории попадания на Марс.
К 4 февраля MPF удалился на 19 млн км от Земли и движется с гелиоцентрической скоростью около 30 км/с. Все системы станции работают штатно.
7 февраля. Все системы MPF работали во время коррекции 3 февраля нормально, и заданное приращение скорости отработано с точностью лучше 2%.
5 февраля вне сеанса связи бортовой компьютер станции перезапустился. Анализ показал, что перезапуск был вызван делением на ноль в программе управления ориентацией ACS. Космический аппарат правильно среагировал на нештатную ситуацию и перешел в режим, в котором программа ACS не используется и сокращается скорость радиообмена с Землей.
6 февраля на MPF были посланы команды для увеличения скорости передачи и посылки на Землю диагностической информации. Управление ориентацией через ACS пока не восстановлено, но в этом пока нет острой необходимости.
5-7 февраля в JPL состоялось общее совещание научных групп проекта "Mars Pathfinder" с целью ввести в работу вновь выбранных исследователей, сформировать научные оперативные группы и обсудить базовый план операций на поверхности. Участники высказали много ценных предложений по плану работ на первые двое "солов" на поверхности Марса.
Новости космонавтики 1997 №4:
21 февраля. Станция "Mars Pathfinder" находится в отличном состоянии и удалилась от Земли примерно на 25 млн км. На прошедшей неделе не проводилось никаких важных работ с аппаратом: принята политика "невмешательства" на большую часть сеансов приема информации.
Спецгруппа по расследованию ошибочных данных по дальности, получаемых наземной станцией DSS-15 в период между маневрами ТСМ-1 и ТСМ-2, пришла к выводу, чю отклонение примерно на 500 единиц дальности было вызвано неверным значением параметра инверсии сигнала Ошибка была исправлена, и данные DSS-15 пришли в норму.
Внесен ряд измерений в программное обеспечение наземного оборудования, используемого совместно с аналогом станции для моделирования на Земле. На аналоге начаты и продлятся в течение двух месяцев испытания на гибкость ПО фазы входа в атмосферу, спуска и посадки (EDL).
28 февраля. MPF находится в отличном состоянии и удалился от Земли на 32 млн км. Существенных операций по управлению в течение недели не было. Расследование недавних проблем с перезапуском бортового компьютера и программ ориентации (5 февраля.) показало, что они связаны с ошибкой в программе блока детектора команд, приводившей к изменению содержимого регистров операций с плавающей точкой. Ошибку обнаружили Стив Столпер и Гленн Ривз, которые в настоящее время составляют исправленный вариант.
27-28 февраля состоялось совместное совещание научных групп проектов "Mars Pathfinder", "Mars Global Surveyor" и "Mars Surveyor'98". В действительности, программа MPF мало пересекается с двумя остальными, но совещание было полезным.
Группа управления ровером провела на полигоне JPL проверку оперативной готовности марсохода "Sojourner". На будущей неделе будет проводиться отработка номинального плана на два первых "сола" (марсианские сутки).
8 марта. Ко вчерашнему дню "Mars Pathfinder" удалился на 37 млн км от Земли и работает штатно. Суммарное расстояние в гелиоцентрической системе отсчета, пройденное с момента старта, достигло 248 млн км - пройдена половина пути.
3 марта начата серия проверок связи для этапа EDL с использованием аппарата и средств записи телеметрии в Голдстоуне. Тесты имитируют режим записи при спуске и имеют целью убедиться, что все существенные события будут записаны. Первый тест был успешным; на следующей неделе пройдут еще три.
7 и 8 марта проходила проверка оперативной готовности к работам на поверхности №3. Это первый подобный тест после старта. Начало испытаний было отмечено несколькими проблемами, но в целом они прошли успешно. Все группы проекта совместно работали над выполнением всех критических операций первого сола и пересмотром плана на Сол 2.
3 и 4 марта группа ровера провела из JPL дистанционные испытания ровера у кратера Эмбой. Испытания охватили четверо марсианских суток и включали навигацию и перемещение ровера, научные и технические эксперименты. В работах участвовала научная группа MPF.
Новости космонавтики 1997 №6:
14 марта. Сегодня в 17:00 PST (15 марта в 01:00 GMT) станция "Mars Pathfinder" обошла на трассе полета к Марсу запущенную раньше "Mars Global Surveyor". Оба аппарата находились в этот день на равном расстоянии от Марса - 69.7 млн км. Это не значит, правда, что станции разошлись на расстоянии вытянутой руки - они идут по разным траекториям и минимальное расстояние между ними составило 4.7 млн км.
"Mars Pathfinder" идет по так называемой траектории "типа 1", обеспечивающей перелет по трассе Земля - Марс менее чем за полвитка вокруг Солнца за 212 суток при общей длине траектории 497 млн км. "Mars Global Surveyor", запущенный на месяц раньше, идет по 10-месячной траектории "типа 2" (более полувитка) общей длиной около 700 млн км со временем перелета 309 суток. Ее использование снижает скорость встречи КА с Марсом и, соответственно, потребную скорость для торможения и выхода на орбиту.
По состоянию на 14 марта MPF удалился на 43.7 млн км от Земли и ему остается пройти уже меньше половины пути. Две коррекции планируются на 7 мая и 24 июня. 4 июля около 10:00 PDT (17:00 GMT) аппарат должен выполнить посадку на Марс.
Станция находится в хорошем состоянии. На прошедшей неделе имела место ошибка при выдаче команды на станцию - была послана команда запустить последовательность операций, которая на станции отсутствовала. Космический аппарат отреагировал должным образом - отверг недопустимую команду. Приняты меры по ужесточению процесса утверждения выдаваемых на борт команд.
Закончены испытания системы связи для этапа входа в атмосферу, спуска и посадки (EDL), начатые на прошлой неделе. Вся аппаратура и программно-математическое обеспечение станций Сети дальней связи NASA работали штатно.
На аналоге станции успешно продвигаются испытания летного программного обеспечения. На полигоне в здании 230 в JPL (так называемая "Марсианская песочница") 14 марта предполагается провести полномасштабные испытания уборки воздушных амортизаторов после посадки.
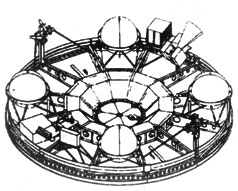 Перелетная ступень АМС "Mars Pathfinder". JPL. |
21 марта. Станция MPF находится примерно в 49 млн км от Земли. За прошедшую неделю существенных работ с ней не проводилось, состояние систем хорошее.
Испытания программно-математического обеспечения этапа EDL идут хорошо. Успешно закончены испытания по уборке воздушных амортизаторов в "песочнице". Закончена также серия испытаний алгоритмов выведения парашюта и срабатывания ракетных двигателей. Во время них выявлены два серьезных замечания, которые, по всей видимости, заставят внести изменения в летное программное обеспечение Заседании группы изменений по летному ПО запланировано на 1 апреля. На нем будет решено, какие изменения внести и какие "регрессионные" испытания провести.
Новости космонавтики 1997 №7:
28 марта. Станция находится в 55 млн км от Земли и работает штатно. Наиболее важным событием за неделю был разворот оси станции так, что она теперь "смотрит" на 5° "впереди" Земли. Подсистемы ориентации и двигательная установка работали впервые за 7 недель, и сработали безупречно. В течение оставшейся части полета ориентация MPF будет регулярно уточняться, чтобы ось не отклонялась от направления на Землю более чем на 5°.
В Университете Аризоны успешно прошла серия испытаний прототипа поверхностной камеры IMP по опознанию Солнца. Это означает, что поиск Солнца и наведение антенны высокого усиления HGA на поверхности должны пройти нормально.
25-26 марта здесь же прошла встреча научной группы IMP. Был рассмотрен план работы на 1-й и 2-й "солы" (местные сутки), обсуждался план работы на солы 3-5. Был принят сценарий съемки с помощью IMP, обсуждались вопросы обработки изображений и распределения данных.
4 апреля. Станция MPF находится на расстоянии 64 млн км от Земли в хорошем состоянии. На прошедшей неделе основным событием был переход к новому конволюционному (сверточному) коду с параметрами К=15, R=1/6 для сигнала борт-Земля. "Pathfinder" является первым американским аппаратом, использующим этот код в регулярных операциях совместно с сетью DSN, что дает существенный выигрыш в возможностях передачи. Группа управления довольна полученными результатами.
Состоялось совещание по изменениям в программном обеспечении этапов входа, спуска, посадки EDL и работы на поверхности. Изменения должны быть сделаны для устранения ошибок, обнаруженных при тестировании аппарата с момента запуска. Исполнение изменений и подготовка к загрузке их на борт займут примерно два месяца.
Новости космонавтики 1997 №9:
11 апреля. Станция находится в полете 128 суток и удалилась от Земли на 71 млн км. До посадки на Марс остается 85 суток.
На прошедшей неделе были проведены периодический контроль метеорологического комплекса ASI/MET и цитирование насоса. В системы теплоотвода. Кроме того, были внесены изменения в параметры бортовой программы, ответственные за реагирование на отказы.
На Земле, в "марсианской песочнице" на технологическом экземпляре КА проведен с успехом тест готовности к работе, начиная с двух суток перед прилетом и до двух местных суток после посадки. Было отмечено незначительное замечание по этапу втягивания посадочных амортизаторов, которое изучается. При имитации работы на поверхности был отработан отказ антенны высокого усиления HGA и использование антенны низкого усиления LGA.
На совещании научной группы в штаб-квартире NASA в Вашингтоне обсуждались вопросы прав на данные станции и роль участвующих (т.е. приглашенных) ученых. Составлен проект соглашения по этим вопросам.
18 апреля. Станция находится в хорошем состоянии. В течение прошедшей недели производился сбор данных солнечного датчика с целью уточнить его характеристики при больших углах Солнца. За время после запуска дальнейшего ухудшения характеристик датчика не произошло.
В Лаборатории реактивного движения состоялась первая сессия по изучению опыта проектирования станции "Mars Pathfinder" посвященная вопросам системного уровня. На 28 апреля запланирована вторая сессия по подсистемам.
25 апреля. На прошедшей неделе для станции "Mars Pathfinder" наступила заключительная стадия перелета, начало которой было отмечено подключением четвертого и последнего квадранта солнечной батареи. Кроме того, состоялся плановый разворот станции на Землю.
Группа управления успешно провела 5-й тест готовности к работе "(ORT-5). Этот недельный тест представлял собой имитацию пяти суток работ на поверхности Марса с целью подтверждения штатного плана работы на поверхности и подготовки управленцев, научной группы и привлекаемых ученых. Во время тренировки были некоторые трудности с задействованием ровера, но в целом тест прошел очень успешно. Выявлено несколько замечаний, которые будут устранены перед намеченным на 19 мая тестом ORT-6.
2 мая. Станция находится в хорошем состоянии и после 149 суток полета удалилась на 98 млн км от Земли. До посадки на Марс остается 63 дня.
Группа планирования входа, спуска и посадки (EDL) провела с успехом защиту бортовой программы EDL (с учетом последних изменений и выполненных после запуска испытаний) и детального плана работ по коррекции ТСМ-5 и заключительному подходу к планете. Никаких серьезных замечаний не выявлено.
Новости космонавтики 1997 №10:
9 мая. Третья коррекция траектории станции ТСМ-3 была успешно выполнена 6 мая. Маневр, проводился с двойной целью - несколько изменить траекторию полета и отработать выполнение экстренной коррекции непосредственно перед входом в атмосферу Марса. Приращение скорости состояло из трех компонент - боковой, направленной от Марса (0.4 м/с), продольной для уточнения времени прилета (0.1 м/с) и еще одной боковой, направленной к Марсу (0.5 м/с). Все три импульса были выданы без замечаний, и станция была переведена на траекторию, близкую к расчетной траектории попадания. Погрешности маневра ТСМ-3 будут исправлены при маневре ТСМ-4, запланированным на 24 июня.
16 мая. "Mars Pathfinder" находится в пути 163 дня, до посадки на Марс остается 49 суток. Станция находится в 115 млн км от Земли и 26 млн км от Марса. На прошедшей неделе были выполнены прогрев аккумуляторных батарей и проверка характеристик солнечной батареи.
На Земле с успехом прошел смотр готовности к входу в атмосферу, спуску, посадке и научной работе на поверхности. Комиссия во главе с Майком Сандером задала много полезных вопросов и дала несколько советов, но в итоге заключила, что до 4 июля проект MPF будет готов к посадке.
На аналоге станции проведен второй из трех тестов готовности к работе с имитацией всех операций до входа и коррекции ТСМ-5А. Одновременно на летном аппарате был проведен тест связи этапа входа, спуска и посадки (EDL). Несколько членов группы приема данных EDL были командированы для участия в тесте на мадридскую станцию Сети дальней связи. Тесты были закончены успешно и дали полезный опыт.
Три наиболее серьезных замечания по работе на поверхности, выявленных во время теста ORT-5 (см. сообщение за 25 апреля), стали предметом отдельных испытаний. Замечания касались стратегии движения "лепестков" станции после посадки, принятия решения о развертывании рампы для схода ровера, определения цели для ровера и передачи изображений по всей цепочке. Испытания показали, что замечания устранены.
Новости космонавтики 1997 №11:
23 мая. Станция "Mars Pathfinder" успешно продолжает полет к Марсу. Единственным существенным событием за прошедшую неделю было проведение её ориентации на Землю. Кроме того, возобновлено почти круглосуточное слежение за AMС средствами Сети дальней связи NASA. На Земле проведен шестой многодневный смотр оперативной готовности - ORT-6. Во время этих испытаний предполагалось проверить аварийные сценарии работы при низком уровне энергопитания или при неработающих аккумуляторных батареях, а также изменения, сделанные по результатам ORT-5. Тест сопровождался отказами обеспечивающего оборудования из-за которых перезагружался компьютер макета станции и поневоле приходилось отрабатывать методику выхода из нештатной ситуации. Были замечания и к камере IMP. Лишь с "третьих суток на Марсе" неприятности с наземкой кончились и операторы смогли "прогнать" по-новой два первых дня. Испытания признаны успешными, устранение замечаний будет проверено в ходе ORT-7.
30 мая. Наиболее важным событием прошедшей недели было начало подзарядки аккумуляторной батареи станции. За время, прошедшее после ее установки на аппарате, было использовано около 22 А-час из начального заряда в 56 А-час. За полгода перелета батарея частично деградировала, но, как ожидалось, ее все же можно зарядить до 40 А-час. Фактически за двое суток подзарядки было накоплено 7 А-час, и группа управления оценивает безопасность дальнейшей подзарядки.
Закончены изменения бортового программного обеспечения (ПО) и идут их испытания на аналоге станции. На следующей неделе исправления в ПО будут загружены на борт.
Персонал Сети дальней связи закрыл последнее замечание по точности измерений дальности, которое было проблемой в течение последних месяцев. Причиной оказался дефектный блок электроники на станции Голдстоун. В настоящее время измерения соответствуют заложенной в проект точности.
По состоянию на 30 мая станция находилась в 140 млн км от Земли и 17 млн км от Марса. До прибытия на планету остается 35 суток.
Телескоп Хаббла определяет погоду на Марсе
20 мая. М.Побединская по сообщениям NASA. В то время как два космических аппарата NASA спешат к Марсу, астрономы, используя Космический телескоп Хаббла, готовят данные по прогнозу погоды на Марсе, чтобы полугодовая миссия этих аппаратов была успешной.
Новые данные телескопа Хаббла показывают, что "марсианское вторжение" космических кораблей будет проходить при погодных условиях, весьма отличных от тех, которые были на Марсе во время посадки на его поверхность американских станций "Викинг" 21 год назад.
Атмосферные условия на Марсе будут влиять как на приземление станции "Mars Pathfinder", которое ожидается 4 июля, так и на прибытие к Марсу 11 сентября АМС "Mars Global Surveyor", который будет составлять карту планеты с ее орбиты. Данные, полученные 10 и 30 марта, указывают на серьезные изменения некоторых локальных погодных условий, а также общее увеличение облачности и похолодание, по сравнению с погодными условиями, с которыми столкнулись АМС "Viking" два десятилетия тому назад.
А в сентябре "Mars Global Surveyor" выйдет на высокоэллиптическую орбиту спутника Марса и, используя аэродинамическое торможение в верхней атмосфере, в течение нескольких месяцев перейдет на круговую орбиту вокруг Красной планеты. Плотность атмосферы является ключевым фактором для точности исполнения этого сложного маневра торможения, а телескоп Хаббла является идеальным инструментом для обнаружения пылевой бури, которая может быть угрозой для "Surveyor'a", вызывая резкое изменение плотности атмосферного воздуха планеты. Такая буря может явиться причиной десятикратной перегрузки КА в марсианской атмосфере на высоте 100 км над поверхностью планеты.
Телескоп Хаббла обнаружил определенные участки на поверхности Марса, которые изменялись из-за пыли, переносимой ветром. Наиболее известным экземпляром является "классическое темное пятно", которое называется Цербер (Cerberus). Размеры его соизмеримы с размерами Калифорнии (1300 на 400 км). Этот темный район был обнаружен наземными обсерваториями еще в начале века и затем в деталях изучен в семидесятые годы орбитальными аппаратами "Mariner 9" и "Viking".
Телескоп Хаббла очень удобен для долговременного изучения Марса. И когда Марс максимально приближен к Земле, с его помощью можно рассмотреть даже такие небольшие детали, которые имеют 40 км в поперечнике. Это позволяет астрономам определить детали в перемещении облаков и периодичность пылевых бурь.
Новости космонавтики 1997 №12:
13 июня. 21 день остался до прибытия на Марс американской межпланетной станции "Mars Pathfinder", которая сегодня находилась в 160 млн км от Земли и 10 млн км от Марса.
Группа управления успешно провела последний тест оперативной готовности (ORT) к входу в атмосферу, спуску, посадке и операциям на поверхности. Тест имитировал коррекцию ТСМ-5, посадку, выход ровера в первые сутки на поверхности, а также его движение и серию пресс-конференций в течение двух первых суток.
Новости космонавтики 1997 №13:
20 июня. Станция "Mars Pathfinder" быстро приближается к Марсу, до которого осталось только 7 млн км.
13 июня был проведен смотр готовности ко входу в атмосферу, посадке и работе на поверхности. Серьезных замечаний нет.
За последнюю неделю была выполнена загрузка на борт новой версии программного обеспечения, в которой по результатам теста оперативной готовности ORT-7 были сделаны два небольших изменения. Перезагрузка бортового компьютера прошла успешно, и в течение двух часов был восстановлен нормальный режим полета.
За время послестартовых испытаний ровера было предложено большое количество изменений в его программное обеспечение. На этой неделе, перед контрольной проверкой ровера, в ПО были внесены небольшие изменения. Сегодня во время контрольной проверки ровер "ожил" по команде от посадочного аппарата, воспринял поправки, и, судя по телеметрии, все идет штатно
Закончена проверка правильности всех командных последовательностей, применяемых на этапе перед входом в атмосферу и во время начальных операций на поверхности. Начиная с выходных 21-22 июня, около 370 последовательностей будут загружены на станцию.
27 июня. До посадки станции "Mars Pathfinder" на Марс остается 8 суток. После 202 дней полета станция находится в 3.5 млн км от Марса и в 180 млн км от Земли. Скорость полета составляет 5 км/с по отношению к Марсу.
20 июня была проведена заключительная проверка состояния посадочного аппарата и ровера. Было отмечено, что все системы КА, включая критичный на этапе посадки радиолокационный высотомер и научные инструменты, находятся в отличном состоянии, как и во время прошлой проверки полгода назад. Затем операторы загрузили те 370 последовательностей, которые потребуются станции при работе на поверхности.
25 июня в 10:00 PDT (17:00 GMT) станция выполнила последнюю перед посадкой коррекцию траектории ТСМ-4. Маневр проводился в два включения, разделенные интервалом в 45 минут. Первое включение четырех боковых двигателей станции длилось 1.6 сек. При втором включении использовались два двигателя, расположенные вблизи теплозащитного экрана, которые проработали 2.2 сек. Суммарное изменение скорости составило 18 мм/сек (именно так, миллиметров в секунду!)
Тем самым были заданы условия входа в атмосферу и посадки, которые состоятся 4 июля в 10:00 PDT (17:00 GMT) и 10:07 PDT (17:07 GMT), соответственно, по времени прихода сигнала. В действительности время прохождения радиосигнала по маршруту Марс-Земля составит в этот день 10 мин 35 сек, так что станция должна сесть в 09:57 PDT (16:57 GMT) по бортовому времени.
30 июня в 13:42 PDT (20:42 GMT) станция исполнит команду на переход в посадочный режим. За 12 или 6 часов до входа в атмосферу может быть проведена коррекция ТСМ-5. Решение о необходимости ее проведения группа управления примет вечером 3 июля.
Новости космонавтики 1997 №14:
Марс. Пылевая буря на Марсе
1 июля. Е.Девятьяров по сообщениям NASA, UPI и Рейтер. Цветные снимки высокого разрешения, сделанные Космическим телескопом имени Хаббла 27 июня в преддверии планируемой посадки "Pathfinder'a", намеченной на 4 июля, зафиксировали зарождение пылевой бури в глубоких каньонах Долины Маринера, всего в 1000 км южнее расчетного места приземления аппарата.
Как заявил Стив Ли, представитель Лаборатории физики атмосферы и космоса Университета Колорадо, специалисты не ожидали ничего подобного в это время марсианского года. Время посадки было выбрано в "межсезонье" - между холодной облачной погодой и пылевыми бурями. Если обнаруженная пылевая буря не перейдет в глобальную, то ее воздействие на "Pathfinder" окажется минимальным. Однако, специалисты пока не знают, как будет развиваться эта буря - она может прекратиться на следующий день, продлиться несколько недель или перерасти в глобальную.
Астрономы "Хаббла" сообщили о присутствии перистых облаков над местом посадки, а также тонкого слоя облаков севернее. По заключению специалистов, благодаря такому количеству облаков, основная масса пыли, вероятно, будет оставаться в пределах каньонов. Если пыль поднимется до уровня облаков, лед сконденсируется на частицах пыли, и они, отяжелев, быстро выпадут обратно на поверхность. Пыль, конечно, может и на небольших высотах переместиться к ожидаемому месту посадки марсохода, однако исследователи говорят, что имеющееся доминирующее направление ветра не позволит этого сделать.
"Если пыль распространится до места посадки, небо над ним окажется розовым, подобно увиденному "Viking'ами", - говорит Филип Джеймс из Университета Толидо. - В противном случае "Pathfinder", по-видимому, покажет голубое небо с яркими облаками."
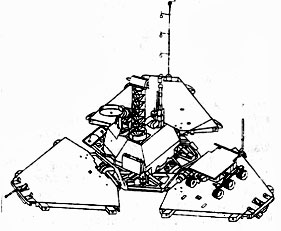
И.Лисов по сообщениям JPL, NASA, "Lockheed Martin", ИТАР-ТАСС, Рейтер, ЮПИ.
4 июля 1997 г. в 17:07:25 GMT американская автоматическая межпланетная станция "Mars Pathfinder" успешно выполнила посадку на поверхность планеты Марс в Долине Ареса. Посадочный аппарат и марсоход "Sojourner" успешно ведут исследования района посадки.
Это - третья посадка на Марс американского аппарата. Летом 1976 г. на Красную планету успешно сели две тяжелые станции "Viking", созданные для ответа на один фундаментальный вопрос: Есть ли жизнь на Марсе? Посадочный аппарат станции "Viking 1" проработал более 6 лет и закончил работу 11 ноября 1982 г., но ответ на основной вопрос получился невнятным, на уровне "это маловероятно, но не исключено".
"Mars Pathfinder" меньше, проще и не замахивается на такой фундаментальный вопрос. Станция была разработана в течение трех с половиной лет в рамках программы дешевых исследовательских КА "Discovery" и запущена 4 декабря 1996 г. с основной целью отработки дешевой схемы посадки на Марс и дополнительной - проведения научных исследований при помощи стационарного посадочного аппарата и марсохода, или ровера.
Официальная стоимость проекта - 150 млн $, что в пересчете на современную стоимость доллара дает 196 млн. Реально было израсходовано немного меньше, но с учетом запуска и управления общие расходы составили 266 млн $. Для сравнения: стоимость проекта "Viking" составила 619 млн $ в ценах 1972 г., или 2.1 млрд в долларах 1994 г., без учета затрат на эксплуатацию. Тем не менее научная программа MPF, включающая изучение атмосферы, ландшафта и грунта, составлена тщательно, а успех миссии считается шагом по направлению к пилотируемой экспедиции на Марс.
Название станции отражает ее назначение - послужить первопроходцем для нового поколения марсианских аппаратов США. Имя роверу дала в 1995 г. победительница общенационального конкурса 13-летняя школьница Валери Амбройз - в честь аболиционистки времен Гражданской войны в США Соджорнер Трус. Посадочный аппарат и третья часть станции - перелетная ступень - собственных имен не имеют. Но писать все время два слова - "посадочный аппарат" - неудобно. Пожалуй, придется иногда называть его неточно станцией, а иногда использовать американское название - лэндер.
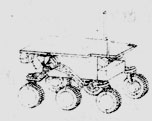
При запуске станция имела массу 895 кг, из которых 94 кг составило топливо бортовой ДУ, при входе в атмосферу Марса 570 кг, а после посадки - 360 кг. Три лепестка посадочного устройства, покрытые солнечными элементами, имеют диаметр 2.75 м и общую площадь 2.8 м2. За день лэндер может израсходовать 1200 Вт-час, а пиковое энергопотребление составляет 160 Вт. Ночью в его распоряжении только аккумуляторы емкостью более 40 А-час. Посадочный аппарат оснащен стереокамерой IMP, метеокомплексом ASI/MET, ветровыми "колбасками" для измерения скорости ветра и магнитами для извлечения из грунта магнитных частиц размером до 0.1 мм.
Ровер здорово напоминает детскую игрушку: он имеет 65 см в длину, 48 см в ширину и 30 см в высоту в рабочем положении, и массу 10.5 кг. Для движения марсоход использует шесть колес из алюминия с ободом из нержавеющей стали, каждое диаметром 13 см.
Марсоход имеет впереди стереокамеру для передачи снимков (кадр 256x256 пикселов каждые 2 секунды) и лазерную навигационную систему, позволяющую находить опасные препятствия и ямы на пути. Сзади стоят цветная камера и спектрометр APXS. В основном ровер будет перемещаться полуавтономно - по координатам, заданным с Земли, самостоятельно выбирая маршрут. Его штатная скорость - 1 см/сек, побольше, чем у улитки, но поменьше, чем у черепахи. Ровер может идти по поверхности при двух условиях: когда светит Солнце (аккумуляторы подзаряжаются и видно, куда едешь) и когда Земля находится над горизонтом и есть связь. Используя солнечную батарею площадью 0.2 м2, за день ровер может иметь до 100 Вт-час энергии, а максимальный расход составит 16 Вт. Запасными являются литий-тионол-хлорные аккумуляторы. Ровер греется за счет трех радиоизотопных нагревателя по 1 Вт каждый на плутонии-238.
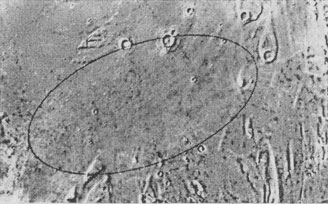 Снимок расчетного района посадки с посадочным эллипсом. Фото NASA |
Ровер должен проанализировать образцы камней и грунта при помощи альфа-протон-рентгеновского спектрометра APXS, определить их химический и минералогический состав и решить многие загадки, например, действительно ли некоторые найденные на Земле метеориты выбиты с Марса, и как происходит превращение скальных пород в почвообразный грунт.
Расчетный срок работы посадочного аппарата - 30 марсианских дней (с 4 июля по 5 августа), а ровера - 7 суток. Самый минимум, который разработчики ожидали от станции - это успешная посадка и несколько снимков поверхности.
Три спускаемых аппарата советских станций достигли поверхности Марса - "Марс-2" и "Марс-3" из серии М-71 в 1971 и "Марс-6" из серии М-73 в 1974 г. Однако ни один из них не смог выполнить программу работ на поверхности. На спускаемых аппаратах этих станций устанавливался шагающий марсоход предназначенный для изучения грунта Марса в нескольких точках. Таким образом, "Sojourner" не является первым марсоходом, но, безусловно, первым успешным.
На этапе перелета станция успешно выполнила 4 коррекции (9 января, 3 февраля, 6 мая и 25 июня) 19-20 июня была выполнена предпосадочная проверка посадочного аппарата и ровера, а 23 июня - переданы на борт 370 командных последовательностей на спуск и посадку.
Посадка станции "Mars Pathfinder" (MPF) планировалась на 4 июля. День национального праздника - День независимости - частично был выбран исходя из геометрии перелета, частично - произвольным решением разработчиков. Расчетное время касания поверхности было 16:56 по Гринвичу. Но в этот день радиосигнал проходил 192 млн км от Марса до Земли за 10 мин 35 сек. Такие или большие задержки характерны для полетов к планетам, и времена, когда на станции на самом деле происходит то или иное событие, редко попадают в отчеты. Для зрителей, а во многих случаях и для группы управления, важен момент, когда сигнал об этом событии приходит на Землю. Для этого придумано специальное обозначение - Earth Recieving Time (ERT), или время приема на Земле.
А поскольку станция управляется из Лаборатории реактивного движения (JPL) в Пасадене, где принято тихоокеанское летнее время PDT, и во всех репортажах специалисты группы управления привычно говорят "утро" или "вечер", то и мы будем давать все времена в PDT по времени прихода сигнала ERT, а случаи использования другого времени оговаривать. В этой системе расчетный момент посадки записывался как 10:07 PDT ERT (17:07 GMT ERT), а циклограмма посадки выглядела так:
| Время, PDT ERT | Событие |
| 09:32 | Отделение перелетной ступени |
| 10:02 | Вход в верхнюю атмосферу |
| 10:06:30 | Посадка |
| 11:32-12:33 | Втягивание амортизаторов, открытие лепестков |
| 12:45 | Восход Солнца |
| 13:55 | Прием несущей через антенну низкого усиления |
| 14:07 | Прием информации через антенну низкого усиления (40 бит/с) |
| 15:20 | Поиск Солнца, развертывание антенны высокого усиления и первый приемный сеанс (16:13-17:00) с передачей тестового кадра (2250 бит/с) |
| 16:30 | Начало съемки панорамы |
| 17:40-17:55 | Совещание по развертыванию трапов |
| 18.00-19:57 | Начало развертывания трапов для схода ровера |
| 18:55 | Второй прием информации, прием части панорамы |
| 19:30- 20:50 | Совещание по возможности схода ровера |
| 20:58 | Начало схода ровера |
| 21:24-22:26 | Третий прием данных через HGA |
| 01:45 | Заход Солнца |
Расчетная точка посадки имела координаты 19.0°с.ш., 33.7°з.д., примерно в 800 км от места посадки "Viking 1" (22.3°с.ш., 48.0°з.д.). Размеры посадочного эллипса, или возможного района посадки, составляли 100x200 км. Точка была выбрана на равнине, граничащей с бывшим грандиозным водным потоком. Когда-то обширное озеро прорвало ледяную плотину, и в течение 2 недель в 1000 раз больше воды, чем сейчас несет Амазонка, пропахали эту долину.
Как сообщил Дж Мак-Дауэлл (США), место посадки MPF находится в пределах эллипса рассеяния планировавшейся точки А1 посадки КА "Viking 1", куда эта станция должна была сесть 4 июля. Но после съемки района А1 в 1976 г. группа управления решила, что местность слишком пересеченная, и перенесла точку посадки "Viking 1" к северо-западу.
С потоком были принесены множество обломков горных пород - научный руководитель проекта д-р Мэттью Голомбек сравнил этот район с "пещерой Аладдина", полной геологических сокровищ. Среди них должны быть и обломки с соседних кратерированных нагорий. Так как на Марсе тектоника плит не развита, эти породы имеют возраст от 3.6 до 4.6 млрд лет и могут рассказать ученым о ранней геологической истории Марса. Именно в этих ранних периодах многие ученые рассчитывают найти следы существовавшей на Марсе жизни. Особенно важным было бы бы найти доказательства стабильного существования тогда воды.
30 июня в 12:00 станция находилась в 2 млн км от Марса, 1 июля - в 1.6 млн км, а 2 июля - в 1.1 млн км. Станция приняла посадочную ориентацию 30 июня, развернувшись на 7°.
3 июля около 04:00 PDT станция вошла в сферу влияния Марса. Группа управления, насчитывающая около 200 человек, готовилась к посадке. "Мы все тут под влиянием Марса," - сказал корреспондентам заместитель менеджера проекта и менеджер летных систем Брайан Мьюирхед. За 24 часа до посадки станция находилась в 450000 км от планеты и шла к ней со скоростью 5.4 км/с, а в 19:45 прошла отметку 380000 км.
На пресс-конференции утром 3 июля ученые продемонстрировали черно-белый снимок Марса, сделанный накануне второй станцией "Mars Global Surveyor" с расстояния 10.5 млн км. Снимок подтвердил, что местная пылевая буря в Долине Маринера не распространится до расчетной точки посадки. Атмосфера над ней остается очень холодной, и никаких признаков ветра на поверхности нет. Расчетная температура в момент посадки -84°С.
По случаю прибытия к Марсу в Пасадене высадился большой десант руководителей NASA во главе с директором Дэниелом Голдином. "Мы возвращаемся, чтобы остаться," - сказал заместитель директора NASA по космической науке Весли Хантресс об американской марсианской программе. Он сказал, что в течение ближайших 8 лет к Марсу будет направлено 10 аппаратов - пять орбитальных, четыре посадочных, а вершиной этого "наступления" станет доставка на Землю марсианского грунта. Стоимость этой миссии будет меньше (в пересчете на современные цены), чем одна лунная экспедиция по программе "Apollo".
Голдин заявил, что полет "Pathfinder'a" не гарантирован от неудачи, но вся программа может завершиться успехом даже после нескольких первых неудач. Он объявил, что не будет искать козла отпущения. "Я хочу, чтобы люди принимали риск, - сказал он. - Я хочу, чтобы они знали: Если будет неудача, мы придем к ним пожать руки."
Рано утром 4 июля навигационная группа во главе с Питером Каллемейном доложила, что резервной коррекции ТСМ-5 не потребуется. При отклонении траектории от расчетной она могла бы состояться за 12 или 6 часов до посадки. Самая последняя оценка траектории показала, что угол входа вместо расчетных 14.2° составит 13.9°, и станция идет с перелетом в 45 км от центра посадочного эллипса. Разницы, как объяснил менеджер миссии Ричард Кук, никакой. В 07:30 станция находилась в 198000 км от планеты и шла со скоростью 6.8 км/с.
За семь месяцев полета разработчики и операторы приобрели определенную уверенность в станции, в которую они вложили сердце и душу и которая ни разу не дала серьезного сбоя. Но посадка - это этап, когда возможны любые неожиданности. Ведь садиться приходилось на неизвестную поверхность, лежащую под атмосферой достоверно неизвестной плотности. Вроде бы все возможные нештатные варианты продуманы и отработаны, и все же... Ричард Кук сказал, что настроение среди его людей - счастливое, тревожное и нервное. "Все идет поразительно гладко..."
Около 09:00 станция слила за борт охлаждающую жидкость. За 34 минуты до посадки были подорваны 46 зарядов, и перелетная ступень, которая обеспечивала перелет аппарата от Земли к Марсу, отделилась от него. В течение нескольких минут ступень диаметром 2.6 м и высотой 1.5 м блокировала слабый радиосигнал от посадочного аппарата, но затем он появился вновь. Станция осталась в тепловой защите, изготовленной "Lockheed Martin Astronmautics" в Литтлтоне (Колорадо) и состоящей из композитного материала графит/полицианат и абляционной обмазки. Этот материал был разработан еще для проекта "Viking" и используется поныне во внешнем баке шаттла.
Под аплодисменты техническая группа, работавшая со станцией на этапе перелета, передала управление руководителю полета, главному инженеру летных систем Робу Мэннингу.
Вход в атмосферу со скоростью 7.4 км/с (в 1.8 раз больше, чем скорость входа посадочных аппаратов АМС Viking") состоялся за 4.5 минуты до посадки. Точных данных о фактических временах событий у нас нет, но о них можно уверенно писать потому, что они привели к желаемому результату. Минуты две станция тормозилась с помощью лобового экрана диаметром 2.64 м, который нагрелся примерно до 1100°С. Через 70 сек после входа станция испытала максимум перегрузок - около 20g. Парашют диаметром 7.3 м (модифицированная модель из проекта "Viking") был введен по команде от акселерометров на сверхзвуковой скорости 400 м/с. Высота ввода могла составлять от 11 до 5 км (от 135 до 190 сек от момента входа). Лобовой экран был сброшен 20 сек спустя, а еще через 20 сек посадочный аппарат вывешен на 20-метровом стропе под хвостовым обтекателем.
Через 90 секунд после ввода парашюта включился радиовысотомер. По его команде на высоте 300 м, за 8 секунд до касания, станция в течение 0.3 сек надула четыре окружающих ее амортизатора, каждый из шести секций, до давления в 0.07 земной атмосферы, превратившись в шарик диаметром 5.8 м и временно "оглохнув". За 4 секунды до касания, на высоте 100 м, тормозные реактивные двигатели на хвостовом обтекателе включились на 2.2 сек и почти остановили падение. Строп был перерезан пирозарядом, обтекатель и парашют уведены остаточной тягой двигателей, а станция упала на поверхность. Посадка произошла около трех часов утра по местному марсианскому времени.
По первым опубликованным данным, "шарик" сделал три прыжка длиной до 90 м и остановился через 95 секунд. Однако 11 июля данные о посадке были существенно уточнены. Она произошла в 0.6 км от последней расчетной точки. Спуск на парашюте происходил со скоростью около 60 м/с при боковом ветре до 13 м/с. В момент включения на высоте 98 м твердотопливных двигателей станция снижалась со скоростью 61.5 м/с. Трос, соединяющий посадочный аппарат с хвостовым обтекателем, был отрезан на высоте 21 м, за 4 сек до касания. Ударившись о поверхность со скоростью 18 м/с, "шарик" отскочил со скоростью 12.5 м/с и подпрыгнул на высоту 15 м. В течение следующих 2.5 минут "мячик" преодолел около 1 км - он сделал 14-15 прыжков, а потом некоторое время катился. Больше всего разработчики беспокоились за поведение амортизаторов, разработанных Сандийской лаборатории ВВС США, при столкновении с поверхностью. Амортизаторы выдержали.
(Хотя парашютно-амортизационная схема оправдала себя, использование ее в последующих полетах к Марсу маловероятно. Следующие посадочные аппараты планируется направлять в более "гладкие" области и сажать традиционными парашютно-реактивными средствами.)
Теперь предстояло ждать радиосигнала в течение четырех мучительных часов. Пока станция "приходила в себя", антенна низкого усиления LGA была "спрятана", да и посадка приходилась на время восхода Земли над горизонтом Марса. Но произошло маленькое чудо: сигнал со станции пришел всего через три минуты, в 10:10 PDT. Дело в том, что на станции был реализован специальный сигнал несущей, главным образом для оценки ускорений во время спуска. Он шел через отдельную антенну на одном из лепестков посадочного устройства, причем амплитуда сигнала менялась естественным образом с каждой новой конфигурацией станции. На этом же сигнале был реализован так называемый семафор - во время критических операций (отделение тормозного экрана, вывешивание на стропе, прохождение высоты 600 м, завершение втягивания амортизаторов и завершение раскрытия лепестков) принудительно изменялась частота. Предполагалось, что сигнал несущей будет выделен лишь постфактум, при обработке широкого диапазона спектра принятых сигналов. Но случилось так, что он был сразу принят станцией слежения под Мадридом. "Мы сели!" - прокричал Роб Мэннинг и обнял Тома Ривеллини - разработчика системы амортизаторов.
Из этого сигнала стало ясно, что станции повезло - она "улеглась" на основание, а не на боковой лепесток. Это означало, что при открытии лепестков станции не потребуется переворачиваться в вертикальное положение. "Это великолепное, великолепное начало," - сказал Маннинг. По изменению частоты сигнала было уточнено время касания (10:07:25 PDT ERT), место - примерно в 19 км юго-западнее расчетной точки и отклонение оси от вертикали - 2.5°.
Примерно через 90 мин после посадки инженеры JPL узнали, что станция втянула под себя амортизаторы, полностью развернула три лепестка посадочного устройства из стали и графита и ждет восхода Солнца. По плану на это отводилось 3 часа. Солнце взошло примерно через 3 часа после посадки, и начался подзаряд батарей посадочного аппарата.
В 14:07, строго по графику, операторы получили штатный сигнал через LGA, телеметрическую информацию (все системы в норме!) и первые данные по плотности атмосферы и температуре. В Долине Ареса оказалось немного теплее, чем во время работы посадочных аппаратов "Viking'oв" во второй половине 1970-х годов. Руководитель атмосферной группы д-р Тимоти Скофилд сообщил, что температура равна -53°С.
* Предстоящая посадка на Марс и подготовленный к ней "Космический карнавал" NASA стали гвоздем программы калифорнийской ярмарки, открывшейся 2 июля в г.Сан-Рафаэль. Сотрудники Центра Эймса, используя снимки АМС "Viking", создали программу - трехмерный имитатор посадки на Марс, с которой могут поиграть посетители. Им также были предложены фильмы и мультимедийная продукция NASA и доступ к WWW-страницам агентства. Три астронавта NASA участвовали в открытии ярмарки. Карнавал станет составной частью еще нескольких выставок, в том числе в сентябре в Лос-Анжелесе, в которой примет участие Рэй Брэдбери. * 4 июля Президент США Уилльям Клинтон отметил успешную посадку АМС "Mars Pathfinder" как замечательное достижение и свидетельство изобретательности американцев. "Наше возвращение на Марс сегодня отмечает начало новой эры в национальной программе космических исследований," - заявил он. Президент поздравил разработчиков станции в NASA и Лаборатории реактивного движения и подчеркнул короткий срок разработки и низкую стоимость проекта, ставшие возможными с новыми методами работы NASA. Вице-президент США Альберт Гор позвонил Дэниелу Голдину и поздравил его ведомство с "абсолютно выдающейся работой". |
Станции было приказано разблокировать головку камеры IMP. Камера автоматически отыскала Солнце, установила свою ориентацию и положение Земли, после чего направила на нее антенну высокого усиления HGA.
Эй, уберите ваши юбки!
4 июля в 16:28 началась передача информации через антенну HGA и в 18:30 группа научная группа IMP показала корреспондентам первую панораму. Она была составлена из примерно 120 отдельных кадров размером с почтовую марку, сделанных еще до того, как камера была поднята на мачте в рабочее положение на высоту 1.5 м. Так как снимки пустили в дело без обработки, на границах кадров изображение ломалось, но картина была ясной. Вокруг станции расстилалась пустыня с многочисленными крупными камнями и горными вершинами на горизонте. На переднем плане были видны лепестки и сидящий в транспортном положении ровер.
Детальное изучение панорамы показало, что два мешка-амортизатора не убрались полностью под посадочный аппарат и слегка накрыли край лепестка в месте схода ровера со стороны заднего трапа, слева на снимке. Группы управления лэндера и ровера приняли решение попробовать поднять накрытый лепесток на 45°, подтянуть мешки дополнительно и опустить лепесток вновь.
После того как соответствующая последовательность команд была проверена, операторы в 19:08 передали ее на MPF. К сожалению, при приеме новой панорамы, которая должен был подтвердить успех операции, произошел сбой на станции Сети дальней связи. Оставшуюся часть панорамы удалось принять в последнем в этот день приемном сеансе, который начался в 22:00. Ко всеобщему облегчению, лепесток оказался чистым. Однако сводить ровер на поверхность было уже поздно. На станцию были переданы команды на развертывание второго трапа и расфиксацию ровера, но операторы не получили подтверждения их исполнения.
В последнем сеансе выяснилось, что ровер "разговаривает" с лэндером нештатно. Марсоход не имеет прямой связи с Землей - он должен передавать данные на посадочную ступень по радиоканалу. По плану, "Sojourner" должен был раз в 10 минут передавать на лэндер определенный формат данных. Однако этот формат передавался не полностью. Специалистам по управлению и бортовым программам осталась ночь на анализ.
За первый сол на Марсе (марсианские сутки называются сол - от общего для всех индоевропейцев "солнечного" корня) со станции было получено несколько сот новых снимков, из которых были скомпонованы цветные изображения. Работа с MPF закончилась в 22:30, когда Земля зашла за марсианский горизонт. Спутников-ретрансляторов у Марса пока нет, нет и связи, пока Земля не взойдет вновь.
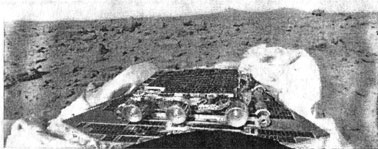 Панорама Марса, снятый камерой IMP. На переднем плане ровер и амортизаторы. Фото NASA. |
Торжественный Съезд
5 июля. На пресс-конференции в 10:00 руководитель группы ровера д-р Джекоб Матиевич сообщил, что наиболее вероятной причиной плохого приема данных с "Sojourner'a" является сбой синхронизации программ на ровере и лэндере.
Ночью ученые исследовали снимки с MPF и сравнивали их с фотографиями станций "Viking". На цветных снимках пустыня выглядела бурой, а небо на горизонте - красновато-коричневым. Как сообщил руководитель группы IMP Питер Смит, станция села в 30 км южнее большого горного пика и в 3-4 км к северо-западу от края кратера диаметром в несколько километров. Камни вокруг были самой разной формы - один напоминал кресло, в котором мог бы обитать какой-нибудь бездомный марсианин. Сначала ученые полагали, что это парашют станции, но объект оказался неярким и парашютом быть не мог.
Утром было решено, что ровер будет сходить по переднему трапу. Перед ним на поверхности было меньше камней. Мэттью Голомбек сказал, что два крупных камня вблизи посадочного аппарата выбраны первыми целями ровера. Их форма и цвет заставляют предполагать различный состав и происхождение.
В 10:08 Земля взошла над Долиной Ареса. В этот день работа со станцией была возможна в течение 11 часов. План был такой: около 13:00 проводится короткий сеанс связи для задания новых параметров модема на ровере. В 14:30 становится известно, развернут ли второй трап. Если да, ровер "встает" в рабочее положение и около 19:40 сходит с переднего трапа.
В жизни все оказалось сложнее. Утром выяснилось, что связь между лэндером и ровером ненадежна и периодически пропадает. Без надежной связи управлять марсоходом на поверхности было невозможно - он бы смог выполнить только узкий круг заранее запрограммированных действий. Правда, если бы работа этим и ограничилась, миссия MPF уже рассматривалась бы как 90-процентный успех. Для ста процентов нужно было еще сойти, исследовать хотя бы один камень и хотя бы одну точку грунта, и снять посадочный аппарат.
Разбираясь в ситуации, специалисты установили, что вечером в пятницу 4 июля компьютер лэндера перезапустился и ждал команд с Земли. Причина, по-видимому, крылась в программном обеспечении и не была в этот день найдена. Второй проблемой была работа модема на ровере, который также пришлось инициализировать. Только в 17:00 группа управления получила подтверждение, а координатор ровера Мэтт Уоллис объявил, что достигнута надежная связь между двумя объектами.
 Фрагмент панорамы с деталями станции и поднятым трапом. Фото NASA. |
Затем на Марс были отправлены команды на опускание трапов. Каждый трап - это гибкая металлическая полоса длиной 1 м, по которым может сойти марсоход. В транспортном положении трап свернут в трубку, причем слои сцеплены между собой липучкой velcro. После срабатывания пироножей трап медленно разворачивается, причем липучка образует два "рельса" на верхней плоскости. Трапы изготовлены отделением канадской фирмы "Spar Aerospace" по контракту стоимостью 400 тыс $.
Операторы и руководители получили снимки развернутых трапов в 20:10. При этом приеме информации (20:00-21.15) были получены более 90 кадров, которые подтвердили, что трапы развернуты с обеих сторон и опущены под безопасными углами, т.е. не круче 30°. После тщательного анализа изображений группа ровера изменила первоначальное решение и выбрала сход по заднему (на снимках - правому) трапу, наклоненному вроде бы менее круто - под 20° к поверхности. В 22:15, после проверки, команды на подъем из транспортного в штатное положение и на сход были направлены на лэндер, который передал их роверу.
Сход выполнялся в последнем суточном сеансе По плану роверу требовалось 10 мин на исполнение команд. После того, как ровер выпрямился (его "рост" увеличился с 18 до 30 см) и зафиксировал колеса в новом положении, он подошел к краю лепестка и начал спуск. Он состоял из двух этапов, которые должны были занять 4 минуты. Ровер дошел до середины трапа, прогнувшегося до 35°, и остановился, чтобы его сфотографировать (о чем комментатор объявил в 22:46), а затем пошел дальше. Сход контролировался с помощью камеры IMP, передавшей два снимка в течение спуска.
 Марсоход только что вышел на поверхность. Фото NASA. |
Всеобщие аплодисменты вызвал кадр, принятый в 22:59 PDT (05:59 GMT): ровер стоит на поверхности в нескольких сантиметрах от края трапа и в 10 см от ближайшего камня, за ним тянется след колес в пыли. "Шесть колес на земле," - объявил руководитель полета Крис Салво под радостные крики 70 человеке зале управления. "Спасибо за лифт, теперь мы сами," - пошутил кто-то из группы ровера. "Звони домой время от времени," - посоветовал автомату комментатор NASA. Это был второй замечательный момент после посадки. "Все ученые на красном небе," - сказал Ричард Кук.
Когда в действительности "Sojourner" сошел на поверхность, они еще не знали, так как эта операция произошла менее чем за час, а по некоторым сообщениям - всего за 10 мин до захода Земли. Поэтому не осталось времени на то, чтобы выполнить первый поворот. Но, сойдя с трапа, марсоход расфиксировал альфа-протон-рентгеновский спектрометр APXS и опустил его на грунт в месте стоянки. В течение марсианской ночи был запланирован 10-часовой сеанс измерений химического состава грунта с помощью APXS. По окончании его ровер должен "спать", ожидая рассвета.
Наш марсоход, вперед иди, у Билла остановка
6 июля. В районе посадки станции "Mars Pathfinder" видны явные следы протекавшей воды, заявил геолог миссии д-р Рональд Грили. На первых снимках были видны две горки на горизонте, примерно в 2 км от места посадки, которые получили название Твин-Пикс (Twin Peaks). При цифровой обработке снимков на склоне одной из них видно то, что ученые назвали "лыжня" - полоса светлого материала. На второй видно 4-5 горизонтальных полос, которые наверняка оставила вода в ходе серии катастрофических наводнений.
Чтобы ориентироваться на поверхности, ученые и операторы из группы ровера дали ближайшим камням названия, описывающие их внешний вид или данные в честь персонажей мультфильмов. Ближайший, размером с футбольный мяч (длина около 40 см, высота 20-25 см), получил имя Билл-в-ракушках (Barnacle Bill), так как он имеет на поверхности множество выступов, окрашен в три разных цвета и частично покрыт пылью. На несколько метров дальше стоит крупный камень Йоги (Yogi; так звали одного мультяшного медведя), затем Плоская Вершина (Flat Тор) и белый Каспер (Casper, привидение из комиксов). А еще - уже упомянутое Кресло (The Couch), Шарк (Shark, Акула), Ведж (Wedge, Клин) и Скуби-Ду (Scoobie Doo).
* 5 июля директор NASA Дэниел Голдин объявил на фестивале "Planetfest-97" в Пасадене о том, что посадочному аппарату АМС "Mars Pathfinder" дано собственное имя. С этого дня официальное название лэндера - "Мемориальная станция Карла Сагана" (Carl Sagan Memorial Station). Название дано в память об известном астрономе и блестящем популяризаторе науки докторе Карле Сагане, скончавшемся 20 декабря 1996 г. Саган играл ведущую роль в проектах американских АМС "Mariner", "Viking", "Voyager" и "Galileo". В январе 1981 г. такой же почести удостоился заместитель директора NASA по космической науке и бывший руководитель группы съемки Марса с посадочных аппаратов Viking" д-р Томас Матч. Его имя было присвоено посадочному аппарату станции "Viking 1". Фестиваль "Planetfest'97" был организован Планетарным обществом США, которое основали в 1980 г. Карл Саган, Брюс Мерри и Лу Фридман. |
 Ровер "Sojourner" исследует грунт у камня Билл-в-ракушках. Фото NASA. |
На утренней пресс-конференции Мэтт Голомбек и Питер Смит объявили, что первой целью выбран Билл-в-ракушках, прежде всего за свое резкое отличие от множества других камней в окрестностях. Хорошо, что часть камня обнажена - можно изучить состав именно камня, а не пыли. Ну и немаловажное обстоятельство - ехать недалеко. Исследователи отметили, что принцип выбора места посадки полностью оправдал себя: в пределах досягаемости лежат очень разные по цвету, размеру, форме и текстуре породы, в том числе округлые камни, которые явно несла вода. Голомбек сказал, что место посадки MPF совершенно отлично от точек, куда сели станции "Viking".
Двусторонняя связь с лэндером и ровером была установлена около 11:00. Оба объекта перенесли ночь без замечаний. После того какв 14:08 взошло Солнце, началась работа.
Посадочный аппарат подготовил камеру и выполнил съемку стереопанорамы за красным фильтром. "Монстр-панорама", как ее называют, имеет двойное назначение: выявить геологию места посадки и послужить основой планирования движения ровера Используя стереоочки, операторы марсохода будут лучше видеть, куда и как можно вести аппарат.
С метеокомплекса лэндера были получены первые суточные данные. Ночью было -76°С, а днем сравнительно тепло - всего -12°С. Ветер слабый, влажности не было никакой.
Для ускорения передачи данных с "Sojourner'a" операторы постарались довести скорость передачи марсохода до 6300 бит/с. После того как ровер успешно закончил анализ ночного образца грунта, группа управления провела проверку свойств грунта. Для этого пять из шести колес аппарата были застопорены, а шестое вращалось.
Вечером 6 июля ровер выполнил поворот на 70° и, пройдя около 40 см, подошел к камню Билл-в-ракушках задним ходом. Дело в том, что спектрометр закреплен сзади, и если нужно приставить его в определенное место, поневоле приходится "заезжать в гараж". Парковка была не очень удачной - ровер оказался под небольшим углом к цели - и ученые опасались, что подведенный к Биллу спектрометр может не сработать. Но опыт вождения в первые сутки был еще очень мал. В таком положении ровер остался на ночь - каждый сеанс измерений длится 10 часов.
Медведь в песочнице
7 июля. На утренней пресс-конференции обсуждалась вчерашняя монстр-панорама Майкл Малин, специалист по камерам станции, еще раз подтвердил, что в давние времена в Долине Ареса произошло катастрофическое наводнение. Расход воды составлял 1 млн кубометров в секунду, а разлив был сравним по размеру со Средиземным морем. Новым свидетельством работы водного потока оказалось положение крупных камней - местами они нагромождены друг на друга. Малин предположил, что корка на камнях образовалась из соли и отложений, оставшихся при отступлении воды. Похожая корка есть на изверженных породах Гавайских островов. О наводнении говорят и другие признаки - серия гребней и долин, ориентация камней, следы камушков за ними, по которым отслеживается направление потока.
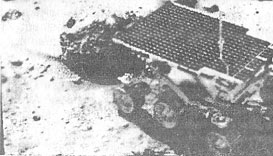 Ровер исследует поверхность Билла-в-ракушках. Фото NASA. |
Мэтт Голомбек использовал для описания работы посадочного аппарата, ровера и всей научной аппаратуры только один эпитет: "прекрасно" Подводя итог первых трех суток, Б.Мьюирхед сравнил его с выдающимся успехом в спорте: "Я чувствую себя так, будто мы выиграли Супербоул, Мировую серию и Кубок мира"
После возобновления связи стало ясно, что измерения по Биллу-в-ракушках получились, и во вторник 8 июля станет известна предварительная оценка его состава.
После восхода Солнца (вскоре после 14:00) ровер получил новое задание и двинулся к камню Йоги. Как и Билл, он свободен от пыли, а у подножия камня песок имеет форму чаши. Но этот камень вчетверо больше ровера "Sojourner" осмотрел ("обнюхал", как выразился корреспондент ЮПИ) Йоги и направил спектрометр на песок у его основания. В этом положении ровер остался на ночь.
Таких камней не бывает...
8 июля. Первый марсианский камень в Долине Ареса оказался на редкость странным. При анализе элементного состава камня Билл-в-ракушках были найдены все характерные признаки марсианского происхождения, но по минералогии и, возможно, истории он оказался удивительно похож на некоторые земные породы.
Как сказал руководитель эксперимента APXS д-р Рудольф Ридер (Институт химии имени Макса Планка, ФРГ), в Билле найдено высокое содержание кремния - по-видимому, он процентов на 30 состоит из кварца. На Земле кварц весьма обычен в вулканических породах. По текстуре камень оказался схож с вулканическими андезитами (это вторая по распространенности вулканическая порода Земли, обязанная своим названием Андам). И это при том, что на снимках Билл выглядел обычным базальтом.
Загадка состоит в том, что земной андезит рождается в недрах в многократном цикле плавления и затвердевания коренных пород, именуемым дифференциацией. Но на Марсе вулканов очень мало, а тектоники плит, по современным представлениям, нет. Поэтому один-единственный анализ ставит эти представления под сомнение.
О том, как такая порода образовалась на Марсе, геологи успели выдать три теории: (1) камень был выброшен при вулканическом извержении, а затем принесен в Долину Ареса; (2) камень был выброшен на поверхность ударом и смешался с другими породами; (3) это порода осадочного происхождения, и компоненты, из которых образовался камень, перемешались в воде существовавших когда-то марсианских океанов.
Надо заметить, что на Земле уже были исследованы 12 метеоритов, которые по изотопному составу соответствуют породам Марса и, несомненно, попали к нам с Красной планеты. Получается, что Билл-в-ракушках оказался 13-м изученным марсианским образцом.
После столь неожиданных результатов анализа Билла-в-ракушках 8 июля с помощью камеры IMP был выполнен дополнительный сеанс съемки этого камня в различных спектральных диапазонах. Вместе со снимками с ровера они позволят выяснить, является ли Билл породой осадочного происхождения, составленной из множества фрагментов, или он однороден и имеет вулканическое происхождение.
Тем временем ровер закончил анализ грунта вблизи Йоги. Затем он некоторое время рыл грунт колесами, разрушая корку. Это один из серии экспериментов по отработке технологии и проверке двигательных свойств ровера, проводимых для использования опыта в следующих экспедициях.
Вечером планировалось исследовать с помощью спектрометра сам Йоги, но снимки показали, что передняя часть камня нависает над ямой, куда ровер запросто мог провалиться и повредить крышку с солнечной батареей. Поэтому 8 июля "Sojourner" только немного сдвинулся влево и передними камерами сделал крупные планы Йоги, чтобы найти интересное место для подвода спектрометра. Потом он развернулся и заснял посадочный аппарат.
На этот день планировалась также перезарядка аккумуляторов, но ввиду их хорошего состояния эта операция была отменена, и были проведены два сеанса приема информации. Всего 8 июля с Марса было принято 85 мегабит данных (со скоростью до 8500 бит/с). К 15:00 на Земле было принято 1575 снимков, в том числе средний "слой" круговой панорамы - от контуров аппарата до расстояния примерно 6 м.
Солнце зашло в 01:20, причем камера IMP впервые показала заход. Как выяснилось, марсианские восходы и закаты ярче и продолжительнее земных. Из-за большого количества пыли в атмосфере (примерно до высоты 40 км, распределена довольно равномерно) небо остается светлым после того, как Солнце давно уже скрылось под горизонтом. А вот о цвете заката почему-то ничего сказано не было, хотя еще 2 июля Питер Смит утверждал, что он вполне может оказаться не красный, а голубой.
Погода в Долине Ареса устойчива и однообразна. Так, 8 июля в три часа пополудни по марсианскому времени в местных субтропиках было -15С. Атмосферное давление составляло 6.74 мбар, дул легкий северо-западный ветер. Видимость достигает 30 км. Где-то в сентябре наступит осень, поднимутся ветры, и количество пыли резко возрастет.
IMP сняла также спутник Марса Деймос. Как сказал Николас Томас из Института Макса Планка, "я рад объявить, что единственная астрономическая обсерватория на Марсе приступила к работе".
Когда твой день называется сол...
9 июля. На пресс-конференции в 13:00 был показан вчерашний снимок лэндера со стороны и обсуждались снимки Билла крупным планом. Камень оказался однородным по структуре, но очень неоднородным по отражающей способности. Предварительный вывод - порода скорее вулканическая, чем осадочная.
Питер Смит показал снимок, на котором ровер работает как бульдозер, выталкивая камешек со своего пути, и поделился личными впечатлениями о жизни, привязанной к марсианским суткам. "Ты говоришь "доброе утро", а Солнце садится. Вот что такое жизнь по марсианскому солнечному времени. Когда солнечные очки выглядят вот так (поднимает красно-синие стереоочки), ты живешь по марсианскому времени. Когда ты начинаешь восхищаться странными камнями, даешь им имена и рассказываешь о них друзьям, это жизнь по марсианскому времени. Когда твой день называется сол, а ночь называется день, это жизнь по марсианскому времени. ." Интересно, что станцию "Mars Pathfinder" не только делали по-новому, но и управляет ей молодежь. Почти всем членам группы управления и научных групп - кому за тридцать, а кому и за двадцать, и лишь немногие из них, как менеджер проекта Тони Спиэр или руководитель научной группы по грунту Генри Мур, - настоящие ветераны. Такая молодежь управляла американскими КА только в эпоху программы "Apollo".
В дальнейших планах операторов MPF - два белых или светло-серых камня, Каспер и Скуби-Дуби-Ду (Scubee-Dubee-Doo), расположенных слева от посадочного аппарата. На будущую неделю запланированы съемки восходов и закатов, Фобоса и Деймоса и расположенных горок Твин-Пикс. (Да, чтобы узнать, где право, а где лево, встань лицом к Твин-Пикс, до которых по новым данным 800 метров, и ты сразу сориентируешься.)
Сейчас ежедневно проводятся два сеанса передачи команд и приема данных. В сеансе 18:30-19:00 через антенну LGA лэндер и ровер доложили о своем "здоровье". Основной сеанс через антенну HGA (она исключительно точно направлена на Землю, и передача идет с утроенной против номинальной скоростью) состоялся с 22:00 до 01:30. В нем ровер подошел к Йоги для химического анализа самого камня. Научная группа решила изучить левую сторону Йоги, темную и свободную от пыли, и с более удобным подъездом. (Фото момента исследования Йоги изображен на обложке справа.)
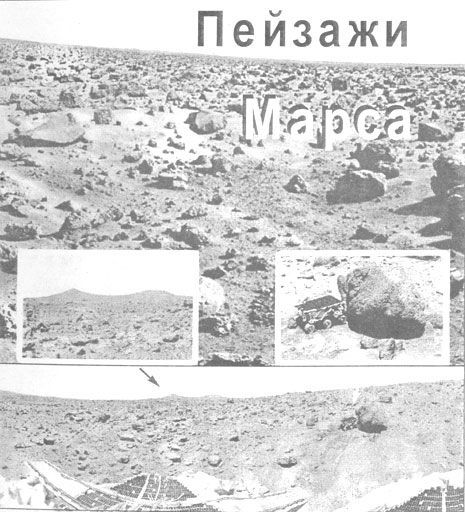
Первое ДТП на Марсе
10 июля. На седьмой день после посадки все системы и приборы лэндера и ровера работали без замечаний, а марсоход двигался немного быстрее в автономном режиме, чем по командам с Земли.
На полуденной пресс-конференции д-р Джастин Маки сообщил, что вчерашняя попытка исследовать состав Йоги не удалась. Он показал последовательные кадры подхода ровера к камню. Группа управления не смогла правильно оценить неясные контуры Йоги и небольшой спуск перед ним. Второй водитель Джек Моррисон задал слишком большое перемещение вперед, и "Sojourner" заехал на камень левым задним колесом. Обнаружив препятствие, ровер остановился и стал ждать команды
Навигационная группа огласила уточненные координаты точки посадки: 19.33°с.ш., 33.55°з.д. (Между прочим, точное местоположение первого "Viking'a" было установлено только спустя год после посадки.) Д-р Кэрол Стоукер из Центра Эймса продемонстрировал первые компьютерные трехмерные модели окружающей местности, выполненные на основе стереоснимков. Оператор ровера может вращать модель на экране в любом направлении и с большей легкостью выбирать путь и анализировать данные.
Д-р Хулиу Магальяеш из Центра Эймса, представляющий группу атмосферного эксперимента ASI/MET, доложил результаты измерений на этапе спуска. На высоте 80 км оказалось -171°С - это была минимальная измеренная температура в атмосфере Марса. В интервале высот от 120 до 60 км оказалось холоднее, чем 21 год назад во время посадки "Viking'ов", а между 60 и 13 км профиль температуры хорошо соответствовал измерениям этих станций. На поверхности в течение 9 июля было от -75° до -13°С.
Вторая попытка подхода к Йоги была назначена на 10 июля, а затем ровер должен был отправиться к Скуби-Ду. "Мы никогда не видели белой породы на Марсе, и это определенно важная цель," - сказал Кэрол Стоукер. Еще один объект, который хотелось бы исследовать - это темно-красный камень Дип-Ред (Deep Red).
Однако в четверг 10 июля была допущена серьезная ошибка: приемник лэндера, выключаемый на ночь для экономии электроэнергии, был включен в 13:46, уже после того, как сигнал дошел до станции. В результате, как считали операторы, передаваемые для обоих аппаратов команды (в том числе и команды на перемещение ровера вблизи Йоги) приняты не были. Операторы обнаружили неладное только перед началом получасового приема информации, запланированного на 21:12. После него, с 22:30 до 00:20, должен был пройти основной сеанс.
Из-за этого в четверг в программе случился вынужденный выходной. "На седьмой день мы решили отдохнуть," - пошутил менеджер миссии Ричард Кук, имея в виду аналогию с седьмым днем Творения. В сеансе 20:00 операции по отводу от Йоги и передаче панорамы будут повторены.