Орбитальный ракетный комплекс «Союз»1
[1964 г.]
1 Проспект орбитального ракетного комплекса «Союз», подготовленный головным ОКБ под руководством С. П. Королева. Публикуется впервые. Первый раздел «Задачи и цели сборки космических аппаратов па орбите», повторяющий аналогичный раздел работы «Предложения по созданию средств для орбитальной сборки» (см. с. 445-449 настоящего издания), здесь опущен.
В данной работе можно видеть углубление идеи орбитальной сборки, в частности, во-первых, отказ от корабля-монтажпика «Восток-Ж» и переход на автоматическую сборку с использованием навесных отсеков, во-вторых, отказ от стыковки ряда идентичных ракетных блоков с их заменой одним ракетным блоком, заправляемым на орбите с помощью танкера-заправщика.
Из комплекса «Союз» был осуществлен пилотируемый космический корабль, испытания которого начались с 1967 г., а идея дозаправки была осуществлена при разработке и пусках грузовых транспортных кораблей «Прогресс». Первый пилотируемый полет на корабле «Союз-1» был осуществлен летчиком-космонавтом В. М. Комаровым 23-24 апреля 1967 г. 30 октября 1967 г. два космических корабля «Союз», запущенных в беспилотном варианте по программе «Космос», впервые в мире осуществили автоматическую стыковку на орбите.
2. Общие сведения о комплексе «Союз». Схема полета
Комплекс «Союз» включает в себя:
пилотируемый корабль «Союз-А», снабженный аппаратурой и двигателями для проведения сближения и стыковки; ракетный блок «Союз-Б», являющийся одноступенчатой космической ракетой, заправляемой на орбите, с навесным отсеком, в котором расположены системы, обеспечивающие стыковку и заправку;
танкеры-заправщики «Союз-В», имеющие в своем составе емкость с доставляемым компонентом и отсек с системами, обеспечивающими сближение, стыковку и перелив компонента топлива в космическую ракету.
Разрабатываемый комплекс предусматривает возможность осуществления сборки на орбите как с участием человека, так и с помощью автоматических систем.
Автоматическая сборка ракетной системы на орбите осуществляется следующим образом.
1. Первым на монтажную орбиту выводится объект «Союз-Б». Монтажная орбита выбирается такой, чтобы объект ежесуточно пролетал над районом старта.
2. После измерения и обработки параметров фактической орбиты наземным измерительным комплексом по командам с Земли производится ориентация объекта «Союз-Б» и включение двигателей с целью коррекции орбиты для компенсации отклонений параметров от расчетных, т. е. обеспечения ежесуточного прохождения над районом старта. Таким образом осуществляется коррекция прохождения.
3. При прохождении объекта «Союз-Б» над районом старта производится запуск следующего носителя с объектом «Союз-В», доставляемым на орбиту с запасом компонента топлива для заправки топливных баков объекта «Союз-Б».
Система управления носителя обеспечивает в конце активного участка предельные отклонения выводимого блока относительно ранее выведенного объекта «Союз-Б» не более 20 км, т. е. обеспечивает выведение в зону автоматического сближения.
4. Если по каким-либо причинам блок не вошел в зону 20 км, то предварительно проводится дальнее сближение.
С Земли производятся измерение параметров фактической орбиты вновь выведенного блока и расчет изменения орбиты объекта «Союз-Б», необходимого для его сближения с выведенным блоком. По командам с Земли осуществляются ориентация объекта «Союз-Б» и включение его корректирующего двигателя.
5. Перед входом объекта «Союз-Б» в зону автоматического сближения включается аппаратура радиопоиска системы ориентации и управления движением, установленная на объектах «Союз-Б» и «Союз-В», и начинается процесс параллельного наведения объекта «Союз-В» на «Союз-Б». В конце сближения производится взаимная ориентация объектов и происходит причаливание объекта «Союз-В» и «Союз-Б».
6. После причаливания производится соединение механических замков, гидравлических и электрических разъемов «Союза-Б» и «Союза-В».
Затем происходит автоматическая заправка объекта «Союз-Б» компонентом топлива, доставленным в танкере объекта «Союз-В». После окончания заправки объект «Союз-В» отделяется от объекта «Союз-Б».
7. Далее в порядке, указанном в п. 2, производится «коррекция прохождения», обеспечивающая прохождение объекта «Союз-Б» над районом старта.
8. При последующем прохождении объекта «Союз-Б» над районом старта производится старт носителя с очередным танкером (объектом «Союз-В») и в порядке, изложенном выше, производится сближение, причаливание, стыковка объекта «Союз-В» с объектом «Союз-Б» и перелив компонента топлива. В случае необходимости производится «дальнее сближение» объекта «Союз-Б» с вновь выведенным танкером.
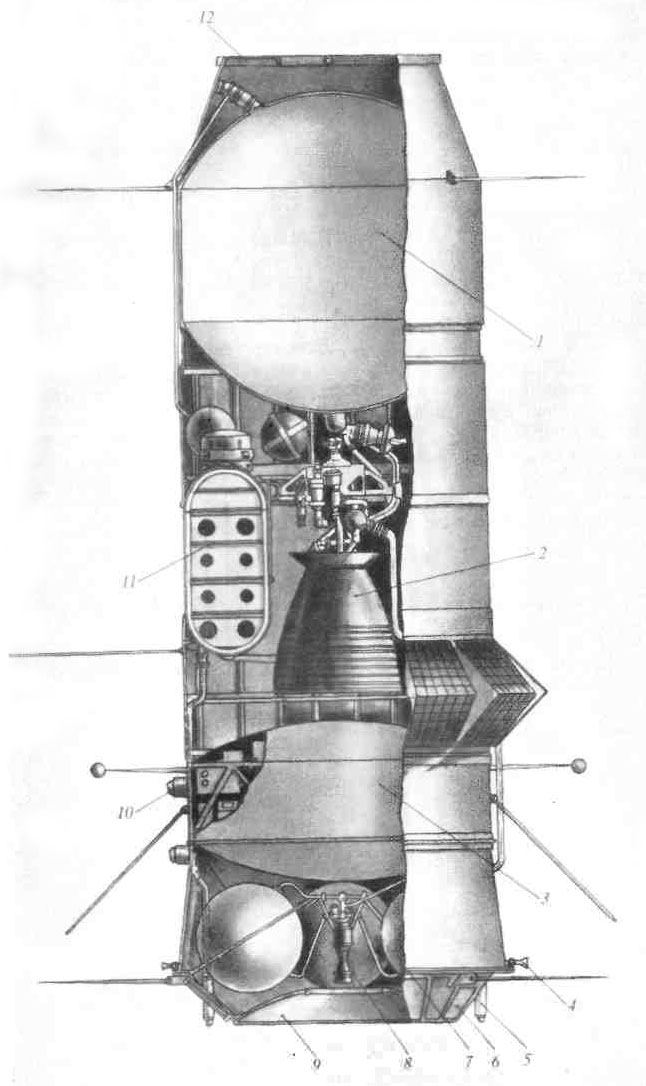
Рис. 1
Ракетный блок «Союз-Б»
1 - бак окислителя; 2 - двигатель космической ракеты; 3 - приборный отсек с аппаратурой; 4 - двигатель причаливания и ориентации; 5 - узел стыковки заправочной магистрали; 6 - жалюзи системы терморегулирования; 7 - топливные баки сближающе-корректирующего двигателя (СКД); 8 - СКД, 9 - узел механической стыковки с танкером; 10 - инфракрасная вертикаль; 11 - бак горючего; 12 - узел механической стыковки с космическим кораблем. |
Необходимое количество танкеров-заправщиков «Союз-В» и ракет-носителей, предназначенных для выведения их на монтажную орбиту, определяется из условия обеспечения заданной заправки топливом баков объекта «Союз-Б». Полная заправка обеспечивается четырьмя танкерами.
По мере необходимости производится коррекция орбиты с целью компенсации торможения объекта атмосферой. После заправки объекта «Союз-Б» топливом производятся старт носителя с кораблем «Союз-А» и его выведение в зону автоматического сближения с объектом «Союз-Б». Далее производятся «автоматическое сближение» и стыковка корабля «Союз-А» с объектом «Союз-Б».
В случае ручного управления причаливанием и сборкой корабля схема полета изменяется следующим образом.
Первым на орбиту выводится объект «Союз-Б». Производится коррекция его орбиты. Затем на орбиту выводится корабль «Союз-А», производятся сближение и стыковка его с объектом «Союз-Б».
При этом на участке причаливания управление сближением и стыковкой производится пилотом-космонавтом.
Коррекция орбиты «поезда» (соединенных объектов «Союз-А» и «Союз-Б») производится за счет использования энергетики и аппаратуры навесного отсека объекта «Союз-Б». Далее процесс сближения и сборки происходит по изложенной выше схеме. Причем в этом случае при причаливании каждого танкера к «поезду» возможен переход на ручное дистанционное управление. Команды пилота на объект «Союз-В» передаются по межбортовой командной радиолинии.
После окончания сборки и проведения контрольных проверок ракетной системы осуществляется полет, схема и программа которого определяются поставленными задачами.
3. Основные особенности корабля «Союз-А»
Корабль «Союз-А» разрабатывается как космический аппарат, пригодный для проведения сборки и осуществления полетов человека в космическом пространстве.
Космический корабль «Союз-А» состоит из следующих основных частей:
спускаемого аппарата; бытового отсека;
отсека двигателей причаливания и ориентации; приборно-агрегатного отсека; навесного орбитального отсека; стыковочного агрегата.
Спускаемый аппарат предназначен для размещения в номинальном варианте экипажа из двух человек; допускается полет трех человек.
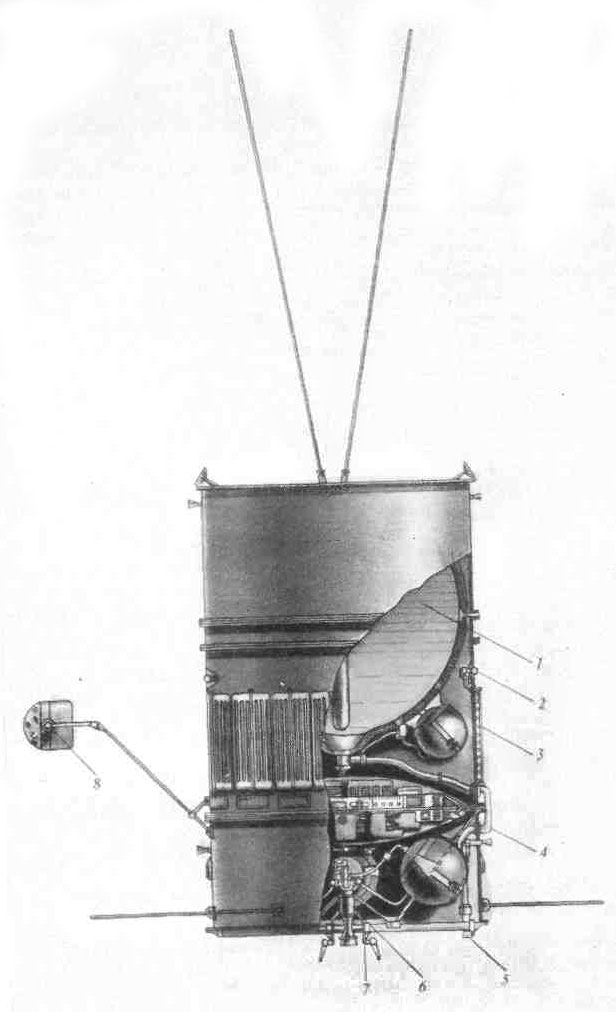
Рис. 2.
Танкер-заправщик «Союз-В»
1 - емкость с компонентом топлива; 2 - двигатели причаливания и ориентации; 3 - жалюзи системы терморегулирования; 4 - приборный отсек; 5 - гидроразъем для перелива топлива; 6 - сближающе-корректирующий двигатель; 7 - стыковочный узел, 8 - головка наведения |
Для обеспечения условий работы и жизнедеятельности экипажа в спускаемом аппарате располагаются:
системы обеспечения жизнедеятельности экипажа в длительном космическом полете; система терморегулирования;
оптическая и телевизионная аппаратура для наблюдения и управления;
пульт пилотов с рукоятками управления; аппаратура радиосвязи и пеленгации; система управления спуском в атмосфере;
парашютная система приземления спускаемого аппарата и другая аппаратура.
Спускаемый аппарат имеет форму, позволяющую осуществлять спуск в атмосфере с использованием аэродинамической подъемной силы, и тепловую защиту, обеспечивающую защиту конструкции и экипажа при входе аппарата в атмосферу Земли со второй космической скоростью.
Со спускаемым аппаратом соединяется через гермолюк бытовой отсек, предназначенный для отдыха членов экипажа при длительном полете в космосе и проведения научных наблюдений. В бытовом отсеке размещаются: система обеспечения жизнедеятельности экипажа; элементы системы терморегулирования; микрофоны и динамики системы связи; научная аппаратура и кинофотооборудование; бытовое оборудование для отдыха и работы членов экипажа; автоматика стыковки.
К верхнему шпангоуту бытового отсека крепится стыковочный агрегат, предназначенный для пристыковки корабля «Союз-А» к объекту «Союз-Б».
Приборный отсек корабля «Союз-А» предназначен для размещения основной аппаратуры, необходимой для выполнения длительных полетов в космическом пространстве. Аппаратура размещается на приборной раме в герметичном контейнере. В отсеке расположены: аппаратура дальнего радиокомплекса;
аппаратура системы ориентации и управления движением; радиотелеметрическая аппаратура; основные агрегаты системы терморегулирования; аппаратура единого энергопитания корабля; программно-временное устройство;
бортовое коммутационное устройство управления автоматикой и т. д.;
датчиковая и релейно-коммутационная аппаратура системы измерений.
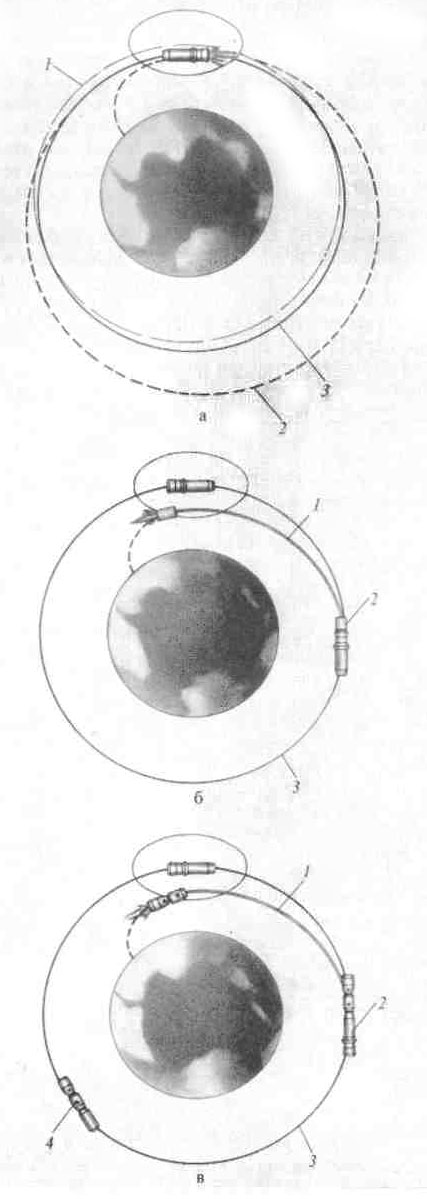
Рис. 3
Схема сборки и заправки ракетно-космической системы «Союз»
а - выведение корабля на орбиту и коррекция ее для обеспечения прохождения через район выведения: 1 - номинальная монтажная орбита, 2 - орбита до коррекции, 3 - орбита после коррекции; б - выведение танкеров, сближение, заправка топливом и коррекция орбиты: 1 - траектория автономного сближения, г - стыковка и заправка, 3 - орбита; в - выведение корабля, сближение и сборка: 1 - траектория автономного сближения, 2 - стыковка и сборка, 3 - орбита, 4 - собранная и заправленная ракетная система |
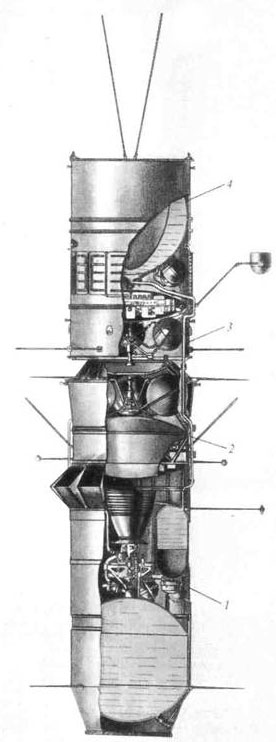
Рис. 4
Заправка топливом на орбите
1 - ракетный блок; 2, 3 - навесные отсеки; 4 - емкость с компонентом топлива |
На наружной поверхности установлены датчики звездной, и солнечной ориентации.
Между приборным отсеком и спускаемым аппаратом располагается отсек двигателей причаливания и ориентации, в котором размещаются запасы топлива и рабочего вещества и системы подачи управляющих двигателей, являющихся исполнительными органами системы ориентации и управления движением. За приборным отсеком расположен агрегатный отсек, являющийся продолжением приборного. В нем располагается сближающе-корректирующая двигательная установка, а на его поверхности - раскладывающаяся солнечная батарея.
Навесной орбитальный отсек установлен у базового шпангоута агрегатного отсека и предназначен для размещения: аппаратуры поиска и измерения параметров относительного движения при сближении; радиоаппаратуры контроля орбиты; аппаратуры передачи команд управления; агрегатов системы терморегулирования;
коммутационного устройства системы управления автоматикой; аппаратуры системы измерений.
Навесной орбитальный отсек после окончания процесса стыковки с космической ракетой сбрасывается.
Предусматриваются необходимые меры для обеспечения безопасности экипажа космического корабля «Союз-А» на всех участках полета. Эти меры в основном сводятся к повышению надежности жизненно важных систем корабля и использованию различных аварийных систем.
4. Основные особенности ракетного блока «Союз-Б»
Ракетный блок «Союз-Б» состоит из двух основных частей: блока «Союз-БМ», являющегося ракетной частью космической ракеты, и базового навесного отсека - блока «Союз-БН». Ракетная часть - блок «Союз-БМ» - включает в себя топливный отсек с системами, двигательную установку, приборы системы управления и телеметрии, узлы стыковки блока с кораблем «Союз-А» и навесным отсеком «Союз-БН».
Базовый навесной отсек - блок «Союз-БН» - содержит аппаратуру и устройства, обеспечивающие сближение и стыковку блока «Союз-Б» с другими доставляемыми блоками, заправку его топливом, коррекцию орбиты, телеметрические измерения, управление и ориентацию ракетной системы и др. В навесном отсеке размещены:
герметичный приборный контейнер с аппаратурой; сближающе-корректирующая двигательная установка с запасами топлива и системой подачи;
система двигателей причаливания и ориентации с запасами топлива;
узел механической стыковки с танкерами «Союз-В»; электро- и гидроразъемы, обеспечивающие связь с системами танкера;
антенно-фидерные устройства радиоаппаратуры. На наружной поверхности отсека расположены: радиаторы и жалюзи системы терморегулирования; два инфракрасных датчика местной вертикали; раскрывающиеся солнечные батареи; телевизионные камеры.
На раме приборного контейнера расположена следующая аппаратура:
аппаратура системы ориентации и управления движением; радиотехническая аппаратура определения параметров орбиты; радиотехническая аппаратура для передачи программ и команд управления;
программно-временное устройство; радиотелевизионная аппаратура; радиотелеметрическая аппаратура;
аппаратура системы измерений (датчиковая и релейно-коммутационная);
основные агрегаты системы терморегулирования; буферная батарея системы энергопитания; автоматика управления и контроля стыковки и заправки топлива.
5. Основные особенности танкера-заправщика
Танкер-заправщик «Союз-В» имеет две разновидности: танкер-заправщик «Союз-ВА» - предназначен для окислителя; танкер-заправщик «Союз-ВБ» - для горючего. Танкер-заправщик состоит из следующих основных частей: топливного отсека - собственно танкера, в котором компоненты топлива доставляются на монтажную орбиту; переходника; приборного отсека; агрегатного отсека.
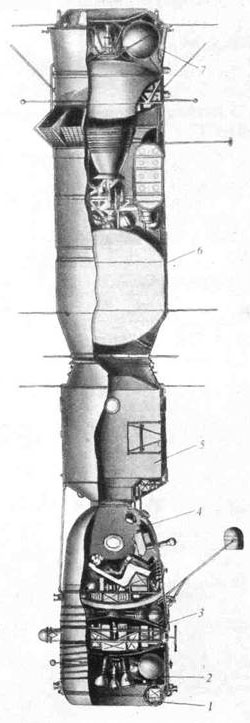
Рис. 5.
Ракетно-космическая система «Союз» после окончания сборки и заправки
1, 7 - навесные отсеки; 2 - агрегатный отсек; 3 - приборный отсек; 4 - спускаемый аппарат; 5 - бытовой отсек; 6 - ракетный блок |
На корпусе отсека установлены агрегаты и арматура исполнительных органов системы ориентации и управления движением. В агрегатном отсеке танкера размещены:
сближающе-корректирующая двигательная установка с запасом топлива и сжатого азота; гидроразъемы перелива топлива; электрические штекерные разъемы.
В топливном отсеке размещаются емкость для компонента топлива и арматура системы опорожнения рабочей емкости. На поверхности переходника размещены: холодильник-излучатель системы терморегулирования с жалюзи и приводами, двигатели системы ориентации и управления движением. Приборный отсек герметичный, на его раме установлены следующие приборы:
аппаратура системы ориентации и управления движением, радиоаппаратура (аппаратура определения параметров орбиты, передачи команд управления, радиотелеметрическая аппаратура); программно-временное устройство; основные агрегаты системы терморегулирования; источники тока системы единого энергопитания.
6. Основные характеристики комплекса «Союз»
| А. Летные характеристики |
| Средняя высота монтажной орбиты | 226 км. |
| Наклонение монтажной орбиты | 65° |
| Эксцентриситет | 0 |
| Период обращения | 88,8 мин. |
| Период прохождения через минимальную точку выведения | 23h41m |
| Б. Основные весовые характеристики |
| Корабль «Союз-А» |
| Общий вес | 5800 кг. |
| Экипаж | 170 кг (2 чел.). |
| | 255 кг (3 чел.). |
| Топливо двигательных установок | 830 кг. |
| Вес конструкции и аппаратуры | 4800 кг. |
| Ракетный блок «Союз-Б» |
| Общий вес | 5700 кг. |
| Конструкция ракетного блока | 1800 кг. |
| Конструкция и аппаратура навесного отсека | 2400 кг |
| Топливо двигательных установок навесного отсека | 1490 кг. |
| Двигатель с тягой 4500 кг | 140 кг. |
| Танкер-заправщик «Союз-В» |
| Общий вес | 6100 кг. |
| Конструкция и аппаратура | 1455 кг. |
| Вес выводимого танкером компонента топлива | 4155 кг. |
| Топливо двигательных установок, необходимое для сближения | 490 кг. |
Автоматические межпланетные станции для исследования Марса и Венеры1
[1964 г.]
1 Проспект унифицированных автоматических межпланетных станций, подготовленный головным ОКБ под руководством С. П. Королева. При разработке проекта этих станций был использован опыт создания и испытаний первых АМС «Венера-1», запущенной 12 февраля 1961 г., и «Марс-1», запущенной 1 ноября 1962 г. Публикуется впервые.
1. Назначение автоматических межпланетных станций серии «Марс - Венера»
Автоматические межпланетные станции - объекты серии «Марс-Венера» (MB) предназначены для изучения планет Венера и Марс, исследования космического пространства вдоль траектории полета, отработки конструкции и аппаратуры, обеспечивающих возможность длительного существования станций в условиях космоса, возможность и надежность двусторонней радиосвязи с Землей на больших расстояниях (до 350 млн. км). В зависимости от целевого назначения автоматические межпланетные станции разрабатывались в четырех вариантах. Объект «Венера-А» предназначен для полета к Венере и посадки на ее поверхность спускаемого аппарата с научной и радиотехнической аппаратурой, обеспечивающей передачу на Землю необходимой информации об условиях на планете.
Объект «Венера-Б» предназначен для полета в сторону Венеры, пролета вблизи ее поверхности (на расстоянии 1000-30 000 км), фотографирования и радиолокации поверхности, а также для проведения научных экспериментов в околопланетном пространстве с дальнейшей передачей на Землю изображений и научных данных.
Объект «Марс-А» предназначен для полета к Марсу, посадки па поверхность Марса спускаемого аппарата и передачи на Землю данных об условиях на поверхности планеты.
Объект «Марс-Б» предназначен для пролета вблизи Марса (на расстоянии 1000-30 000 км) и фотографирования его поверхности с дальнейшей передачей изображения на Землю, а также для исследования околопланетного пространства.
Пускам объектов MB к Венере и Марсу предшествуют пробные пуски космических аппаратов серии «Зонд» двух вариантов, предназначенных для дальнейшей отработки ракеты-носителя и проверки систем и аппаратуры объектов. Пуски зондов позволят также осуществить большую программу научных исследований в космосе.
«Зонд-А» создается на базе объекта «Венера-А». Его запуск осуществляется на траекторию в сторону орбиты Венеры, приближающуюся к Солнцу. При пуске зонда проверяется работа системы ориентации и коррекции и всех остальных систем объекта в условиях длительного пребывания в космосе.
«Зонд-Б» создается на базе объекта «Марс-Б». Запуск этого зонда по траектории к орбите Марса позволит проверить работу радиоаппаратуры на больших расстояниях от Земли (до 330 млн. км), работоспособность аппаратуры в условиях длительного пребывания в космосе и произвести фотографирование Земли с расстояний в 100-150 тыс. км.
Основные характеристики объектов MB
| Характеристика | Вариант объекта |
| «Венера-А» | «Венера-Б» | «Марс-А» | «Марс-Б» | «Зонд-А» | «Зонд-Б» |
| Вес объекта, кг | 948,0 | 935,0 | 1042,0 | 1037,0 | 800,0 | 996,0 |
| Вес спускаемого аппарата, кг | 290,0 | - | 310,0 | - | - | - |
| Вес радиоаппаратуры, кг | 75,0 | 71,0 | 75,0 | 140,0 | 60,0 | 140,0 |
| Вес системы энергопитания, кг | 83,0 | 103,0 | 103,0 | 103,0 | 83,0 | 103,0 |
| Вес научной аппаратуры, кг | 13,5 | 74,0 | 18,5 | 44,5 | 18,0 | 34,0 |
| Время полета, мес | 4 | 6 | 7-8 | 9-11 | 4 | не менее 10 |
| Максимальное удаление от Земли, млн. км | 55 | 130 | 230 | 300 | 40 | до 330 |
| Площадь солнечных батарей, м2 | 2,4 | 2,4 | 2,4 | 2,4 | 2,4 | 2,4 |
| Мощность солнечных батарей, вт | 60,0 | 60,0 | 60,0 | 60,0 | 60,0 | 60,0 |
| Возможное число коррекций | 2 | 2 | 2 | 2 | 2 | 2 |
| Вес корректирующей двигательной установки, кг | 90,0 | 90,0 | 90,0 | 90,0 | 78,0 | 78,0 |
| Тяга КДУ, кг | 200 | 200 | 200 | 200 | 200 | 200 |
| Суммарный импульс двух коррекций, кг-сек | 10 600 | 10 600 | 10 600 | 10 600 | 8000 | 8000 |
2. Краткое описание ракеты-носителя
Для выведения объектов MB к планетам Солнечной системы используется специально разработанная ОКБ ракета-носитель «Молния» - четырехступенчатая ракета с продольно-поперечным делением ступеней.
В качестве первых двух ступеней применена ракета-носитель «Спутник» с некоторыми конструктивными отличиями, обусловленными использованием ее в четырехступенчатом варианте. В связи с особенностями носителя система радиоуправления на центральном блоке ракеты не устанавливается. Ракетной частью III ступени является блок И, снабженный двигателем, использующим в качестве компонентов топлива жидкий кислород и керосин. Конструктивно блок И состоит из топливных баков сферической формы, соединенных межбаковой юбкой, и хвостового отсека, предназначенного для размещения двигательной установки и связи с переходной фермой центрального блока ракеты.
В качестве IV ступени носителя используется специально созданный блок Л с двигателем, работающим также на жидком кислороде и керосине. Блок Л состоит из топливного отсека, выполненного из двух топливных баков кольцевой (торовой) формы, соединенных юбкой, и переходного ферменного отсека, с помощью которого блок Л устанавливается на блок И. В межбаковом пространстве блока Л установлены приборы автономной системы управления полетом ракеты на участках III и IV ступеней полета. Для предохранения от аэродинамических нагрузок на участке выведения блок Л и объект защищены головным обтекателем, сбрасываемым в начале II ступени полета.
Особенностью полета ракеты «Молния» является выведение блока Л с помощью трех ступеней на промежуточную орбиту искусственного спутника Земли, после чего блок Л продолжает безмоторный участок полета по орбите, а в определенный момент времени происходит запуск двигательной установки IV ступени, сообщающей объекту необходимую дополнительную скорость. Стабилизация блока Л на безмоторном («пунктирном») участке полета осуществляется системой стабилизации, установленной на ферменном отсеке блока Л. Там же установлены четыре твердотопливных реактивных двигателя, используемых для создания начальной осевой перегрузки, необходимой для обеспечения запуска двигателя IV ступени в условиях невесомости. После выхода двигателя IV ступени на номинальный режим ферменный отсек отделяется от блока Л.
По достижении расчетной скорости двигатель IV ступени выключается, объект отделяется от блока Л и продолжает полет по межпланетной траектории.
3. Радиотелеметрические наблюдения за работой ракеты-носителя
На участке работы I, II и III ступеней за работой двигателей и систем носителя наблюдают с измерительных пунктов, расположенных на территории Советского Союза.
На участке траектории от конца работы III ступени до начала работы IV ступени (на орбите спутника Земли) наблюдения за работой носителя не ведутся.
При пусках объектов MB включение IV ступени происходит не над территорией Советского Союза, а в более южных широтах (25° с. ш.- для Венеры и Марса). Поэтому для наблюдений за началом работы IV ступени используются корабли плавучего телеметрического комплекса, расположенные в Средиземном и Черном морях.
Конец работы IV ступени наблюдается из Крыма. Для передачи телеметрической информации на борту ракеты устанавливается радиоаппаратура метрового и сантиметрового диапазонов. Кроме прямой передачи, на борту IV ступени есть передача с запоминающего устройства.
4. Особенности траекторий различных вариантов
1. Траектории полета и даты пусков выбираются из условия максимально допустимого веса объектов, обеспечения попадания в планету или пролета вблизи нее и обеспечения наблюдения за работой последней ступени ракеты-носителя.
2. Пуск должен проводиться в оптимальные даты с точностью ±7 суток.
3. Попадание в планету или пролет вблизи нее на нужных расстояниях обеспечивается проведением на траектории двух коррекций; точность траекторий около планет, обеспечиваемая точностью прогноза и точностью коррекций, составляет ±5900 км для вариантов «Венера» и ±3900 км для вариантов «Марс».
4. Траектория «Зонда-А» выбирается такой, чтобы обеспечить полет объекта в сторону Солнца, при этом расстояние до Солнца не должно быть меньше 130 млн. км за 4 месяца (из-за работы оптических датчиков системы ориентации).
Период пуска «Зонда» весом до 800 кг не ограничен во времени (при условии наблюдения за блоком Л с кораблей ПТК и наземных станций).
5. Траектория «Зонда-Б» относительно Земли и Солнца выбирается такой же, как для вариантов «Марс», что обеспечивает полную проверку всех систем объекта до пуска основных вариантов.
Период пуска «Зонда» не ограничен во времени по энергетике вывода на траекторию.
5. Конструкция автоматических межпланетных станций
Конструктивно объекты выполнены в виде двух герметичных отсеков - орбитального (одинакового для всех вариантов) и специального (спускаемый аппарат - для «Венеры-А» и «Марса-А» и спецотсек для размещения фототелевизионной аппаратуры - для «Венеры-Б» и «Марса-Б»). Специальный отсек крепится к орбитальному через переходную юбку с помощью стальных лент и подвижного кольца. На орбитальный отсек устанавливаются корректирующая двигательная установка (КДУ) и панели солнечных батарей. К панелям солнечных батарей крепятся наружные радиаторы системы терморегулирования.
В орбитальном отсеке установлены приборы основных систем, обеспечивающих работу автоматической станции при полете по орбите (радиокомплекс, приборы системы ориентации и коррекции, система управления, система терморегулирования, буферная химическая батарея и часть научной аппаратуры, работающая на орбите).
В спецотсеке расположены приборы, обеспечивающие фотографирование планеты и дальнейшую передачу на Землю изображения и научной информации (фототелевизионные устройства, радиоаппаратура, система ориентации на планету, система управления, химическая батарея). В спускаемых аппаратах объектов «Венера-А» и «Марс-А» установлены системы, обеспечивающие нормальный спуск и работу на поверхности (парашютная система, радиосистема, система управления спуском и работой на поверхности, химическая батарея, научная аппаратура для работы на планете).
Конструкция и аппаратура всех вариантов почти одинаковы, некоторое различие в конструкции и аппаратуре объясняется разными траекториями (в частности, расстояниями от Солнца при полете к Венере и Марсу), а также различным объемом научных задач.
Конструктивно отличаются друг от друга спускаемые аппараты вариантов «Венера-А» и «Марс-А». При разработке конструкции спускаемых аппаратов принимались специальные меры, обеспечивающие перегрузку для аппаратуры не более 400 g при ударе о грунт типа влажного утрамбованного песка или плотной глины. При этом приборная рама амортизируется при ударе о поверхность при отклонении ±45° от продольной оси. Спускаемые аппараты имеют шарообразную форму; аэродинамическая устойчивость при полете в атмосфере планеты обеспечивается центровкой спускаемого аппарата.
Спускаемый аппарат «Венера-А» для посадки на Венеру разрабатывался для следующих условий на поверхности планеты:
температура у поверхности 330-350° К;
давление у поверхности 1,5-5 ата;
состав атмосферы СO2 31-100%; N2 69-0%.
При этих условиях на Венере обеспечивается нормальный спуск аппарата на поверхность со скоростью 8-10 м/сек и передача информации на Землю на участке парашютирования, а также один-два сеанса связи с поверхности планеты.
По имеющимся в последнее время сведениям (новые данные локации Венеры), температура у поверхности Венеры может превышать 400°С (700°К). При таких условиях обеспечивается передача на Землю с участка парашютирования данных о давлении, составе газов и температуре примерно в течение 30 мин с момента раскрытия парашюта.
Из-за жесткого лимита веса при первых пусках не представляется возможным создать спускаемый аппарат, который обеспечивал бы работу аппаратуры на поверхности при температуре 700°К. Спускаемый аппарат «Марс-А» создан для работы при следующих условиях на поверхности Марса:
температура у поверхности - 70 -- + 20° С;
давление у поверхности 0,077-12 кг/см;
состав атмосферы 100% N2 со следами О2.
При этих условиях обеспечиваются нормальный спуск аппарата на поверхность Марса со скоростью 12-14 м/сек и передача научной и телеметрической информации с участка парашютирования в течение одного-двух сеансов на поверхности.
6. Состав обслуживающей аппаратуры
В состав аппаратуры автоматических межпланетных станций входят следующие основные системы и приборы:
| Радиотелеметрическая система (32 и 38 см) | на всех вариантах. |
| Система ориентации на Солнце и система коррекции | на всех вариантах. |
| Корректирующая двигательная установка | на всех вариантах. |
| Система управления | на всех вариантах. |
| Система единого энергопитания | на всех вариантах. |
| Система терморегулирования | на всех вариантах. |
| Система ориентации на планету | на вариантах «Венера-Б», «Марс-Б». |
| Система ориентации на Землю | на всех вариантах, кроме «Венеры-А». |
| Система пеленгации | на вариантах «Марс-А», «Марс-Б», «Зонд-Б». |
| Дублирующая система ориентации на Солнце | на варианте «Марс-Б» |
| Радиосистема (5 и 8 см) | на вариантах «Марс-Б», «Зонд-Б». |
| Парашютная система | на вариантах «Венера-А», «Марс-А». |
7. Научная аппаратура
На автоматических межпланетных станциях MB для проведения научных исследований устанавливается следующая аппаратура:
1. Прибор для исследования радиационных поясов Земли, предполагаемых радиационных поясов планет и космических лучей. Состоит из двух блоков, один (ВФС) устанавливается внутри, второй (НФ) - снаружи орбитального отсека. Устанавливается на всех вариантах.
2. Прибор для изучения концентрации положительно заряженных частиц. Состоит из протонных ловушек ПЛ-15Б, ПЛ-16, ПЛ-17, установленных на солнечной стороне орбитального отсека, и электронного блока Д-120М, стоящего внутри орбитального отсека.
Устанавливается на всех вариантах.
3. Прибор для измерения магнитного поля Земли, магнетизма в космическом пространстве и предполагаемых магнитных полей Венеры и Марса. Электронные блоки СГ-59 и СГ-59А (на «Марсе-А», «Марсе-Б», «Зонде-Б») устанавливаются внутри орбитального отсека, датчики ДМ-1 и ДМ-2 устанавливаются на специальном штыре.
Устанавливается на всех вариантах.
4. Прибор для исследования плотности микрометеоров в космическом пространстве. Состоит из пьезодатчиков СМ-П2, установленных на теневой стороне панелей солнечных батарей, и усилителя ИС-1094А внутри орбитального отсека.
Устанавливается на всех вариантах, кроме «Марса-А».
5. Прибор ЛА-2 для изучения распределения нейтрального водорода около Земли, в космическом пространстве и около планет.
Состоит из блока датчиков ЛА-2Д, установленного снаружи орбитального отсека, и электронного блока ЛА-2Э, установленного внутри орбитального отсека.
Устанавливается на вариантах «Венера-А», «Зонд-А», «Венера-Б».
6. Прибор «Кассиопея» для изучения интенсивности радиоизлучения радиационных поясов планет и космического пространства в диапазоне средних и длинных волн. Состоит из внутреннего приемника-усилителя и ленточной антенны.
Устанавливается на вариантах «Зонд-А», «Венера-Б», «Зонд-Б», «Марс-Б».
7. Прибор ТЯМВ для исследования ядерной компоненты космического излучения. Состоит из блока датчиков ТЯМВ-Д, установленного на подвижном кольце, и двух электронных блоков, установленных внутри спецотсека.
Устанавливается на «Зонде-Б».
8. Прибор РСК-2М для изучения длительного ультрафиолетового и рентгеновского излучения Солнца; датчик прибора РСК-2МД устанавливается на освещенной стороне орбитального отсека, электронный блок РСК-2МЭ - в орбитальном отсеке. Устанавливается на «Зондах».
9. Прибор для обнаружения органических покровов на поверхности Венеры и Марса.
Устанавливается на специальном отсеке в вариантах «Венера-Б» и «Марс-Б».
10. Прибор УС-3 для спектрографирования видимой части поверхности в ультрафиолетовых лучах.
Устанавливается внутри специального отсека в вариантах «Венера-Б» и «Марс-Б».
11. Прибор РА для исследования излучения поверхности Венеры в радиодиапазоне. Блок приемников установлен внутри специального отсека, антенна - на опорном кольце. Устанавливается на «Венере-Б».
12. Прибор РМВ для измерения давления нижней атмосферы Венеры и Марса.
Устанавливается в спускаемом аппарате вариантов «Венера-А» и «Марс-А».
13. Прибор ТИПГ для измерения температуры нижней атмосферы Венеры.
Устанавливается в спускаемом аппарате «Венеры-А».
14. Прибор ТСВ для измерения температуры нижней атмосферы Марса и скорости ветра на Марсе.
Устанавливается в спускаемом аппарате «Марса-А».
15. Прибор Л-1А для исследования радиоактивности поверхности Венеры и Марса.
Устанавливается в спускаемом аппарате «Венеры-А» и «Марса-А».
16. Прибор для обнаружения микроорганизмов на поверхности Венеры и Марса.
Устанавливается в спускаемом аппарате «Венеры-А» и «Марса-А».
17. Прибор для исследования состава газов в атмосфере Венеры и Марса.
Устанавливается в спускаемом аппарате «Венеры-А» (Г8-1, Г8-П) и «Марса-А» (Г8-1, Г9-1, Г9-П).
18. Прибор Р-3 для определения кислотности среды. Устанавливается в спускаемом аппарате «Венеры-А».
19. Прибор К-2 для определения электропроводности среды. Устанавливается в спускаемом аппарате «Венеры-А».
20. Прибор ЭК-1 для определения ареографических координат спускаемого аппарата после посадки. Прибор состоит из датчика-электроквадранта и электронного блока.
Устанавливается в спускаемом аппарате «Марса-А».
21. Прибор ДАС-2 для определения агрегатного состояния и освещенности поверхности Венеры.
Устанавливается в спускаемом аппарате «Венеры-А».
22. Прибор для измерения угловых размеров Фобоса. Устанавливается в спускаемом аппарате «Марса-А».
23. Прибор СК для определения содержания кислорода в верхних слоях атмосферы планет. Состоит из наружного датчика и внутреннего электронного блока.
Устанавливается на «Венере-Б» (специальный отсек) и «Марсе-А» (спускаемый аппарат; датчик - в парашютном отсеке).
24. Прибор ВИКТ-2 для исследования работы механизмов (пар трения) после длительного их пребывания в вакууме. Устанавливается на орбитальном отсеке варианта «Зонд-А».
25. Экспериментальная плазменная двигательная установка для проверки ее работы при постоянной ориентации объекта на Солнце.
Устанавливается на подвижном кольце варианта «Зонд-А».
8. Основные данные о системах объекта
1. Радиотелеметрическая система
Радиотелеметрическая система предназначена для передачи на борт команд и уставок системы ориентации и коррекции, передачи с борта на Землю научной и телеметрической информации и изображения поверхности планет после их фотографирования, для запоминания на борту научной и телеметрической информации, измерения радиальной скорости и наклонной дальности. Радиокомплекс орбитального отсека работает на длинах волн 38 (приемная линия) и 32 см (передающая линия). Обе эти линии обеспечивают передачу на Землю изображения поверхности планет после фотографирования.
На «Марсе-Б» и «Зонде-Б» установлены 2 фототелевизионных устройства с фокусными расстояниями j=500 и j=200 мм и с независимыми трактами пленок; на «Венере-Б» установлено одно фототелевизионное устройство с j=200 мм. Разрешающая способность ФТУ 100 м при съемке с расстояний 1000 км и 3 км при съемке с 30 000 км (длиннофокусный объектив); 250 м при съемке с 1000 км и 7,5 км при съемке с 30 000 км (короткофокусный объектив).
ФТУ обеспечивает следующие режимы работы при передаче изображения по линиям 8 и 5 см:
| Режим | Время передачи одной строки, сек | Число строк в кадре | Время передачи одного кадра, мин | Число элементов в строке | Скорость передачи, дв. ед/сек |
| 8 см | 5 см | 8 см | 5 см |
| I | 8 | 550 | 73,5 | 550 | 1100 | 512 | 200 элементов в секунду (ВИМ) |
| II | 8 | 1100 | 147 | 1100 | 1100 | 1024 |
| III | 2 | 550 | 18,5 | 550 | 400 | 2048 |
| IV | 2 | 1100 | 36 | 1100 | 400 | 4096 |
При фотографировании оптическая ось объекта сканирует по освещенной поверхности с абсолютной угловой скоростью 0,1°/сек. В состав радиокомплекса орбитального отсека входят: 2 приемника, 2 передатчика, 2 задающих генератора, 2 комплекта запоминающего устройства, блок командной радиолинии, блок уставок астрокоррекции, 4 коммутатора, хронизатор, блок формирования сигнала, счетчик циклов и коммутационно-распределительное устройство.
В состав радиоаппаратуры спускаемых аппаратов входят: 2 передатчика, работающих на волне 32 см, 2 задающих генератора, программно-временное устройство, обеспечивающее включение аппаратуры на участке спуска и на поверхности планет, один коммутатор, запоминающее электронное устройство (на «Марсе-Б»), индикатор мощности, обеспечивающий переход на дублирующий комплект передатчика при аварии основного комплекта. В специальном отсеке устанавливаются 2 радиолинии: одна работает на волнах 5 см (передающая линия) и 35 см (приемная линия), вторая - на волне 8 см (передающая линия). В состав радиолинии 8 см входят: блок приемников, радиоблок (с передатчиками), хронизатор, коммутатор. В состав радиолинии 5 см входят: передатчик, коммутатор, блок командной радиолинии, модулятор, задающий генератор, блок кодирования, коммутационно-распределительное устройство, один комплект запоминающего устройства (для спектрорефлексометра). В качестве приемников радиолинии 8 см используются приемники орбитального отсека. Командная радиолиния включает до 107 команд (число команд различно для различных вариантов). Скорости передачи телеметрии: 1, 4, 16 и 64 дв. ед./сек.
2. Система единого энергопитания
Система единого энергопитания обеспечивает питание всех систем объекта во время полета и питание систем спускаемого аппарата в течение 1 сут после посадки с проведением одного-двух сеансов с поверхности. Система состоит из солнечной батареи и буферной химической батареи. В качестве источников тока солнечной батареи используются кремниевые элементы. Химическая батарея состоит из кадмиево-никелевых аккумуляторов, сгруппированных в секции.
Основные характеристики системы энергопитания: ток солнечных батарей 3,12-5,2 а; площадь солнечных батарей 2,4 мг;
потребление в дежурном режиме 1,95-2,12 а; номинальная емкость буферной батареи 84 а-час («Венера-А», «Зонд-А»), 112 а-час («Венера-Б», «Марс-А», «Марс-Б», «Зонд-Б»);
напряжение в сеансе 14±2 в; напряжение в дежурном режиме 14+4-2 в.
Для использования всех резервов солнечных батарей при различных температурных режимах, меняющихся в зависимости от расстояний объекта от Солнца, введено переключение по КРЛ с последовательного соединения секций СБ на параллельное и наоборот.
Автоматика системы энергопитания построена таким образом, что при падении напряжения в сеансе ниже заданного значения (umin) нагрузка отключается; таким образом, исключается переразряд буферной батареи. Отсутствие перезаряда буферной батареи обеспечивается подбором площади кремниевых элементов на солнечных батареях и емкостью буферной батареи.
3. Система ориентации
А. На всех вариантах система ориентации обеспечивает с помощью датчика постоянной ориентации и блока ДУС успокоение объекта от начальных возмущений после отделения от головного блока, поиск Солнца и дальнейшую постоянную ориентацию объекта на Солнце с точностью ±10°. При отказе в работе постоянной солнечной ориентации обеспечивается гироскопическая ориентация объекта на Солнце; при этом за счет определенной скорости закрутки (0,6°/сек ±20%) и момента от светового давления обеспечивается ориентация объекта на Солнце не хуже 25-30° даже при отсутствии периодической ориентации объекта на Солнце.
Б. В варианте «Марс-Б» в спецотсеке устанавливается дублирующая система солнечной ориентации, обеспечивающая ориентацию объекта на Солнце с точностью ±2,5° и закрутку при отказе основной системы (датчик, блок ДУС, статический преобразователь и блок управления).
В. Ориентация объектов «Венера-Б» и «Марс-Б» на планету осуществляется с помощью оптического планетного датчика; поиск планеты осуществляется при помощи солнечного датчика и блока ДУС; во время фотографирования обеспечивается сканирование оптической оси объекта по освещенной поверхности планет.
Г. Ориентация объекта на Землю в сеансах связи с Землей на параболической антенне осуществляется с точностью 50' оптическим датчиком и блоком ДУС. Уставка этого датчика (угол Солнце - объект - Земля) может осуществляться от автономного программного кулачка и по командной радиолинии. Д. На вариантах «Марс-А», «Марс-Б» и «Зонд-Б» устанавливается пеленгационная система, обеспечивающая ориентацию параболической антенны на Землю в случае отказа оптической ориентации (выход из строя датчика).
4. Система астрокоррекции
Для ориентации автоматической станции в пространстве перед включением корректирующей двигательной установки (КДУ), стабилизации в процессе работы КДУ и выключения КДУ при достижении заданной скорости служат оптический датчик, обеспечивающий точную ориентацию объекта на Солнце и звезду (Канопус), гироскоп, интегратор и блок управления. Ориентация объекта в пространстве осуществляется с точностью ±6'; отсечка двигателя - с точностью ±20 см/сек. Надежная работа оптического датчика обеспечивается тем, что в поле зрения как солнечной, так и звездной системы не попадают элементы конструкции; кроме того, около датчика прикреплен специальный щит, защищающий датчик от возможных бликов при попадании Солнца на элементы конструкции. Уставки углов для солнечной и звездной трубок датчика, а также уставка величины импульса производятся по командной радиолинии после точного определения параметров траектории.
5. Пневмосистема ориентации
Пневмосистема автоматических межпланетных станций предназначена для создания необходимых управляющих моментов при работе системы ориентации. В качестве рабочего тела используется сжатый азот, хранящийся в баллонах высокого давления (давление заправки 320 ата).
Кроме баллонов, в состав пневмосистемы входят редукторы, двухпозиционные клапаны, пироклапаны, фильтры и реактивные микродвигатели с тягой сопел порядка 50-130 г. Для объектов «Венера-А», «Венера-Б», «Зонд-А» пневмосистема выполнена в виде единого блока, установленного на орбитальном отсеке около КДУ; на вариантах «Марс-А», «Марс-Б», «Зонд-Б» магистраль высокого давления (баллоны, редукторы) перемещена на юбку, соединяющую орбитальный и специальный отсеки. На всех объектах MB введено дублирование низкой магистрали; в случае аварии в основной магистрали предусмотрена возможность закрытия основной магистрали и перехода на режим гироскопической ориентации или на дублирующую магистраль низкого давления.
6. Корректирующая двигательная установка
Корректирующая двигательная установка (КДУ) предназначена для создания импульса, необходимого для коррекции траектории автоматической межпланетной станции при отклонениях траектории от номинальной.
В качестве КДУ используется ракетная двигательная установка, позволяющая провести 2 коррекции с суммарным импульсом 10 600 кг-сек. Тяга двигателя 200 кг.
На «Зонды» устанавливается КДУ с суммарным импульсом двух коррекций 8000 кг • сек и тягой 200 кг.
7. Система управления
Система управления бортовой аппаратурой обеспечивает включение и выключение всех систем и приборов объекта как по командной радиолинии, так и по временной программе. В состав системы управления входят: бортовые коммутаторы (в орбитальном и специальном отсеках), программно-временные устройства орбитального отсека, блок контроля источников питания. Программно-временное устройство спускаемых аппаратов входит в состав радиосистемы.
Основное программно-временное устройство орбитального отсека выполняет следующие задачи:
включение и выключение системы терморегулирования (на 40 сек каждые 4 мин);
включение и выключение сеансов по заданной программе; управление бортовой аппаратурой в каждом сеансе связи; включение и выключение аппаратуры в дежурном режиме; автономное включение сеансов астрокоррекции, подлетного сеанса (в вариантах «Венера-А», «Марс-А»), сеанса фотографирования (в вариантах «Венера-Б», «Марс-Б»).
Относительная погрешность программно-временного устройства не более ±6- 10~5.
Кроме основного ПВУ, в орбитальном отсеке устанавливается дублирующее программно-временное устройство (ДПВУ), выдающее метки времени только на систему терморегулирования. ДПВУ обеспечивает работу СТР со скважностью 12 на всей траектории полета параллельно с основным ПВУ. При выходе из строя основного ПВУ система терморегулирования работает от ДПВУ.
8. Система терморегулирования
Система терморегулирования обеспечивает нормальный тепловой режим объекта на всей траектории полета. В качестве системы терморегулирования используется двухконтурная замкнутая система, в состав которой входят: внешние радиаторы, внутренние теплообменники, регулятор, насосы, компенсаторы. Регулятор расхода работает от среднего значения показаний двух термодатчиков, размещенных в орбитальном и специальном отсеках. В случае разгерметизации специального отсека предусматривается переход по команде на работу регулятора только по термодатчику орбитального отсека.
Оптические коэффициенты внешних радиаторов обеспечиваются механической и электромеханической обработкой поверхности. В качестве внешней термоизоляции используется пакет териленовой пленки с напыленным алюминием.
Жидкими компонентами в системе терморегулирования являются дитолилметан - теплоноситель и изооктан - хладагент. Система терморегулирования обеспечивает температуру в отсеках 0 +40 °С при нормальной работе системы ориентации и -10 +50 °С при отказе ориентации.
9. Система измерений
Система измерений служит для передачи с борта на Землю параметров систем автоматической станции и научной аппаратуры. Передача идет через телеметрические коммутаторы радиосистемы при непосредственной передаче и при воспроизведении информации с запоминающего устройства (ЗУ).
Через I и III коммутаторы передаются параметры систем объекта и часть научных измерений.
Через II коммутатор, работающий на ЗУ, передаются параметры системы астрокоррекции и КДУ.
Через IV коммутатор, работающий как в режиме непосредственной передачи, так и на ЗУ, передаются параметры научной аппаратуры и некоторые параметры систем объекта. Через V коммутатор, установленный в спускаемом аппарате и работающий в режиме непосредственной передачи, передаются научные измерения, проводимые в атмосфере и на поверхности Венеры и Марса.
Через V коммутатор спецотсека пролетных вариантов, работающий в режиме непосредственной передачи и на ЗУ, передаются параметры научной аппаратуры и систем объекта при работе 8 см передатчика. Через VI коммутатор спецотсека передаются параметры систем объекта в режиме непосредственной передачи при работе 5 см передатчика.
9. Автоматика и программа работы автоматических межпланетных станций
Автоматика объектов MB строится на основе принципа управления работой всех систем от автономного программного устройства (ПВУ) и дублирования этого управления по командной радиолинии по результатам анализа работы систем, полученным по телеметрии с борта.
Все сеансы связи с включением передающих устройств осуществляются от ПВУ, а также по командной радиолинии в любое время видимости автоматических станций с наземных пунктов связи. Сеансы астрокоррекции, подлетный сеанс и сеанс фотографирования также могут проводиться как от ПВУ, так и по КРЛ. Программа проведения сеансов связи построена на периодическом проведении типовых сеансов. Вид типового сеанса и программа его включения определяются исходным состоянием схемы и могут быть изменены поданными на борт командами. На объектах MB приняты следующие типовые сеансы: Сеанс № 1 - приземный - работает передающая и приемная аппаратура; в сеансе проводятся траекторные измерения, производится запись параметров IV коммутатора на ЗУ и непосредственная передача телеметрической информации с I и III коммутаторов; длительность сеанса 128 мин.
Сеанс № 2 - передача телеметрической информации с I (III) коммутатора; длительность сеанса 96 мин.
Сеанс № 2А - передача телеметрической информации с I (III) коммутатора 26 мин, воспроизведение ЗУ 60 мин, передача информации с IV коммутатора 20 мин.
Сеанс № 5 - ориентация объекта на Землю для работы радиосистемы на параболической антенне; автономное воспроизведение ЗУ; непосредственная передача с коммутатора I (III); длительность сеанса 96 мин.
Сеанс № 6 (для «Венеры-Б», «Марса-Б», «Зонда-Б») - связь на параболической антенне; работа 5 и 8 см радиоаппаратуры; передача в сеансе телевизионного изображения; передача информации с I (III) и VI коммутаторов; воспроизведение ЗУ; длительность сеанса 96 мин.
Сеанс № 7 - сеанс астрокоррекции, бортовые передатчики не включаются.
Сеанс № 8 - подлетный (для «Венеры-А», «Марса-А», «Зонда-А»); передача информации с I (III) и IV коммутаторов через параболическую антенну; в начале сеанса - отделение спускаемого аппарата.
Сеанс № 10 - фотографический (для «Венеры-Б», «Марса-Б»); ориентация объекта на планету и фотографирование; запись информации с IV и V коммутаторов на ЗУ; бортовые передатчики не включены.
Сеансы № 2 или 2А, проводимые на малонаправленных антеннах, включаются от ПВУ каждые 5 сут. Сеансы № 5 или 6 от ПВУ проводятся каждые 15 сут.
Автоматическая станция для первой посадки на Луну1
[1964 г.]
1 Проспект автоматической лунной станции «Луна-Е», подготовленный головным ОКБ под руководством С. П. Королева. Публикуется впервые. Летные испытания станций проходили 2 апреля 1963 г., 9 мая, 8 июня, 4 октября, 3 декабря 1965 г., 31 января 1966 г. и успешно завершились осуществлением первой в мире мягкой посадки на Луну 3 февраля 1966 г.
1. Назначение объекта
Объект «Луна-Е» представляет собой управляемый космический аппарат, предназначенный для полета к Луне и посадки на ее поверхность автоматической лунной станции (АЛС). Посадку автоматической лунной станции намечено произвести в Океане Бурь. После посадки с борта станции передается на Землю телевизионное изображение лунного ландшафта и микрорельефа поверхности Луны, а также данные измерений научной аппаратуры - радиометра, сейсмографа и магнитометра. Источники тока автоматической станции рассчитаны на работу аппаратуры на Луне в течение четырех земных суток. За это время программой предусмотрено проведение пяти сеансов передачи информации на Землю продолжительностью по одному часу. Управление работой автоматической станции осуществляется от бортового программного устройства и по командам с Земли. Одновременно с проведением научных экспериментов объекты «Луна-Е» позволят начать отработку систем, обеспечивающих посадку на Луну космических аппаратов.
Пуски объектов «Луна-Е» являются первым этапом на пути освоения Луны.
2. Особенности траектории полета к Луне и схема посадки
Объект «Луна-Е» выводится на траекторию к Луне четырехступенчатой ракетой-носителем «Молния». Первые три ступени ракеты выводят последнюю ступень (блок Л) с объектом на промежуточную орбиту спутника Земли. Выведение объекта «Луна-Е» на траекторию к Луне производится четвертой ступенью, включаемой в заданной точке промежуточной орбиты. Отделение объекта происходит после выключения последней ступени ракеты-носителя. Номинальная траектория полета к Луне имеет следующие характеристики:
время полета до Луны порядка 3,5 сут;
скорость по отношению к Луне перед началом торможения 2630 м/сек;
посадка осуществляется в утренний терминатор (на границу света и тени) в Океан Бурь, западнее кратеров Рейнер и Марий. За счет ошибок системы управления ракеты-носителя траектория объекта может отклониться в картинной плоскости у Луны от номинальной траектории на 20-22 тыс. км. Для компенсации этих отклонений предусмотрена коррекция траектории после удаления объекта на расстояние 250 тыс. км от Земли. При полете к Луне с объектом проводится 9 сеансов радиосвязи, в которых производятся измерения траектории, передается телеметрическая информация и на объект с Земли подаются команды для управления бортовой аппаратурой. Сеансы связи проводятся по специальной программе. Разрешение на начало сеансов выдается по командам с Земли.
Во время четвертого сеанса связи предусмотрена возможность ориентации объекта и измерение углов на Солнце, Землю и Луну системой астронавигации. После обработки на Земле результатов траекторных измерений, полученных в четырех первых сеансах, на борт объекта передаются уставки, определяющие величину корректирующего импульса и его направление в пространстве, а также величину импульса торможения и время включения тормозного двигателя.
В сеансе коррекции осуществляется ориентация объекта на Солнце и Луну для обеспечения необходимого направления выдачи корректирующего импульса. По команде временного устройства объект ориентируется на Солнце с помощью оптических датчиков. Затем осуществляется ориентация объекта на Луну с помощью лунного датчика. После этого выдается команда на разворот объекта на задаваемый с Земли угол, в результате чего он занимает положение, необходимое для проведения коррекции. Максимальная величина корректирующего импульса составляет 130 м/сек.
В автоматике объекта предусмотрена блокировка включения двигателя в случае потери Луны и Солнца оптическими датчиками. В этом случае возможно повторение сеанса коррекции по командам с Земли.
После проведения коррекции отклонение точки посадки на поверхности Луны от расчетной составляет не более 150 км. Траектория полета объекта после проведения коррекции уточняется в последующих сеансах радиосвязи.
За 2 часа до посадки вновь производится ориентация объекта по Солнцу, Луне и Земле. На высоте 8700 км над поверхностью Луны продольная ось объекта направляется по лунной вертикали, которая соответствует направлению вектора скорости при посадке.
На высоте 75 км по команде радиовысотомера включается временное устройство, выдающее команду на включение двигателя и управляющее работой всех систем объекта на участке торможения. Выключение основной камеры двигательной установки производится интегратором на высоте от 5 до 500 м над поверхностью Луны. После выключения основной камеры объект снижается при работающих управляющих соплах с тягой порядка 25 кг. На высоте 3-4 м осуществляется отделение АЛС по команде контактного датчика в сторону, противоположную движению объекта.
С учетом всех погрешностей систем посадки скорость встречи автоматической станции с Луной составляет 4-24 м/сек. Система амортизации обеспечивает сохранность АЛС с аппаратурой при посадке (перегрузки не превышают 200 единиц). После посадки предусматривается проведение 5 сеансов радиосвязи автоматической станции с Землей. Сеансы могут проводиться автономно по команде временного устройства или по командам с Земли. Каждые сутки проводится по одному сеансу длительностью один час.
Во время сеансов связи на Земле производится прием телевизионного изображения лунной поверхности, научной информации и телеметрической информации о работе систем станции. В случае полета объекта по траектории с отклонениями, превышающими допустимые для посадки, автоматика позволяет провести аварийный сеанс торможения, что дает возможность проверить работу всех систем, а в некоторых случаях перевести объект на орбиту спутника Луны.
3. Описание объекта
Объект «Луна-Е» состоит из автоматической лунной станции (АЛС), двигательной установки двухразового запуска, отсека системы управления и двух отделяемых перед торможением отсеков с аппаратурой. Объект устанавливается на носитель с помощью опорной рамы, снабженной пиротехнической системой отделения.
Автоматическая станция представляет собой герметичный контейнер из алюминиевого сплава, в котором размещаются радиосистема, программно-временное устройство, система терморегулирования, телевизионная и научная аппаратура, источники питания. На корпусе станции установлены антенны, датчик магнитометра и иллюминатор, в котором размещается приемная головка телевизионной аппаратуры.
Поддержание необходимого теплового режима в АЛС осуществляется водяной испарительной системой терморегулирования и системой вентиляции, работа которых не зависит от положения станции на поверхности. Для защиты от внешних тепловых потоков на АЛС установлена специальная тепловая изоляция, что обеспечивает нормальный температурный режим приборов при нахождении станции в тени до одних суток.
Для амортизации удара при посадке АЛС используются два заполненных газом баллона-амортизатора, состоящих из резиновой камеры и защитной капроновой оболочки. После посадки производится сброс баллонов по команде от программного устройства или по команде с Земли.
Корректирующая и тормозная двигательная установка состоит из двигателя с насосной системой подачи, управляющих органов и блока баков, который является основной несущей конструкцией объекта. На блоке баков устанавливаются отсек системы управления и два отделяемых отсека.
Двигательная установка включается дважды и работает на трех режимах:
I режим - коррекция (тяга основной камеры равна 4500 кг);
II режим - торможение (тяга основной камеры 4500 кг, диапазон регулирования ±500 кг);
III режим - работа управляющих сопел с тягой 25 кг (режим начинается после выключения основной камеры при торможении).
В отсеке системы управления установлен прибор управления и машинные преобразователи тока. Прибор включает в себя основные блоки системы управления, обеспечивающей управление ракетой-носителем при работе III и IV ступени, и управление объектом при работе КТДУ во время коррекции и торможения.
В отделяемом отсеке I устанавливаются блок питания, пневмосистема для наполнения амортизаторов и система астронавигации, состоящая из оптического блока коррекции и ориентации и электрических блоков. Система астронавигации предназначена для ориентации объекта при коррекции и торможении, а также может быть использована для определения траектории полета объекта посредством замера углов на Луну, Солнце и Землю. В отделяемом отсеке II размещаются часть радиотехнической системы, программно-временные устройства, аппаратура командной радиолинии, радиовысотомер, управляющие органы системы ориентации и блок химических источников тока.
Каждый из отделяемых отсеков крепится к блоку баков с помощью пиротехнической системы и сбрасывается перед торможением объекта.
4. Научная аппаратура
Научная аппаратура размещена на борту автоматической лунной станции (АЛС) и предназначена для проведения следующих экспериментов:
исследование сейсмических явлений на Луне; изучение магнитного поля Луны;
регистрация космических излучений на траектории и на поверхности Луны.
Исследования сейсмических явлений на Луне проводятся с помощью прибора ЛС, состоящего из сейсмографа в карданном подвесе, и усилителя-счетчика. Измерения производятся между сеансами связи.
Изучение магнитного поля Луны осуществляется в сеансах радиосвязи трехкомпонентным магнитометром СГ-57. Регистрация космических лучей в полете и на Луне производится с помощью радиометра КС-17.
Телевизионная система, установленная в АЛС, обеспечивает передачу изображения с четкостью 250 строк. Система имеет панорамную развертку и обеспечивает круговой обзор местности за 1 час.
Включение и выключение системы может проводиться по командам с Земли и от автономного временного устройства. По команде с Земли головка телевизионной камеры может также устанавливаться в заданном направлении для обзора интересующего участка местности.
5. Основные характеристики объекта
| Общий вес объекта после отделения от последней ступени | 1470 кг | минимальный различаемый размер предметов на расстоянии 2 м | 20 мм |
| Вес отделяемых перед торможением отсеков | 312 кг | Характеристики траектории: |
| Конечный вес объекта перед посадкой | 430 кг | время полета к Луне | 3,5 сут |
| Вес автоматической лунной станции | 105 кг | расстояние от Земли до точки коррекции | 250 тыс. км |
| Вес научных приборов | 5 кг | | |
| Характеристики двигательной установки: | скорость торможения у Луны | 2630 м/сек |
| тяга | 4500±500 кг | скорость прилунения АЛС | 4-24 м/сек |
| время работы при торможении | 42 сек | разброс точки прилунения | ±150 км |
| Характеристики телевизионной аппаратуры: | Продолжительность работы станции на Луне | 4 сут |
| вес | 3,4 кг |
| время кругового обзора местности | 1 час |
О программе работ по сварке в космических условиях1
[1964 г.]
1 Телеграмма, направленная С. П. Королевым своим заместителям 29 ноября 1964 г. Публикуется впервые.
Начало практической реализации программы было положено при проведении первого в мире эксперимента по сварке в космосе на космическом корабле «Союз-6» 16 октября 1969 г.
1. Предлагаемый проект программы и совместного плана работ по теме «Сварка в космических условиях» между ОКБ и Институтом им. Е. О. Патона АН УССР может быть положен в основу договора между названными организациями.
2. Особенный интерес представляет четвертый этап работы, но он почему-то затянут окончанием на 1967 и на 1968 г. Это недопустимо поздно! Надо план работ построить пока что поначалу на 2 года: 1965 и 1966. И можно предусмотреть на осень 1966 г. совместное обсуждение результатов и по итогам - продление наших работ еще на 2 года: 1967-1968.
3. В проекте плана недостаточно уделяется внимание энергетике, необходимой для сварки в особых условиях, и, в частности, использованию солнечных концентраторов и других источников. Этот раздел надо сделать самостоятельным и сильно развить его. Работы надо начинать немедленно.
В плане совершенно нет конкретных работ по сварке в особых условиях даже через 2 года. Хотелось бы сварить хотя бы в 1966 г. что-то получше для наших объектов, может быть, тот же концентратор либо емкость, может быть, шлюз для выхода, раму для установки приборов для наружных наблюдений и даже для той же сварки.
Словом, надо подумать, как быстрее перейти от исследования простых образцов к делу, пусть небольшому на первых порах.
4. Считаю, что просимый институтом вес сварочных устройств в целом можно довести до 25 кг и оговорить, что для каждого опыта исходные данные, в том числе и вес, взаимно согласовываются.
5. Надо оговорить, что в программу и в принятый план по взаимному согласованию могут вноситься необходимые изменения и дополнения.
6. Прошу вас как можно скорее мои замечания сообщить в Институт сварки, еще до отъезда академика Б. Е. Патона в командировку, и получить его согласие.
Прошу также передать ему лично мои добрые пожелания.
Космические дали1
[1965 г.]
1 Статья С. П. Королева, опубликованная в газете «Правда» от 1 января 1965 г. под псевдонимом «Профессор К. Сергеев».
Советская наука уверенно завоевывает все новые высоты на пути познания и дальнейшего освоения космического пространства. За истекший год от советских берегов в глубины космоса ушли более тридцати космических аппаратов для выполнения разнообразных исследовательских и экспериментальных научных программ. Космос для науки, только для мирных целей, на благо человека, неутомимо разгадывающего сокровенные тайны природы,- вот тот путь, по которому развиваются и осуществляются советские космические исследования!
Неутомимые труженики, спутники серии «Космос» (в 1964 г. их было запущено 27), провели на околоземных орбитах в сумме по времени примерно одну треть года, выполняя обширную исследовательскую программу, начатую еще 16 марта 1962 г. запуском спутника «Космос-1». Основные этапы этой программы, рассчитанной на ряд лет, охватывают такие крупнейшие разделы, как изучение магнитного поля Земли, верхних слоев атмосферы и образования облачных систем, энергетического состава земных радиационных поясов. Этим путем будут проводиться исследования первичного состава космических лучей и их вариаций, корпускулярных потоков, коротковолнового излучения Солнца и других небесных тел и ряд других вопросов.
Осуществление программы «Космос» представляет исключительный научный интерес, особенно если учесть значительный объем и длительность проводящихся исследований.
Некоторые усовершенствования были достигнуты и в самой методике запусков одновременно нескольких спутников «Космос» на свои орбиты одной ракетой-носителем.
Важнейшим событием явился запуск в январе и июле 1964 г. новых космических систем «Электрон», состоящих каждая из двух научных станций, выводимых одной ракетой-носителем на существенно различные орбиты искусственных спутников Земли.
Основной задачей запуска космических научных станций № 1, 2, 3 и 4 по программе «Электрон» являлось одновременное изучение внутреннего и внешнего радиационных поясов Земли и связанных с ними физических явлений. Одновременно проводилось исследование различных излучений, приходящих из глубин космического пространства, магнитного поля Земли и физических условий в верхних слоях атмосферы.
Успешное осуществление программы «Электрон» позволило впервые получить уникальные опытные данные на высотах от 400 до 68 000 км и результаты первостепенного научного значения. Экспериментальная программа маневрирующего космического аппарата «Полет-2» позволила проверить в практических условиях функционирование ряда новых систем и аппаратуры с целью дальнейшего усовершенствования техники космического полета. Качественно новым крупнейшим шагом, сравнимым, пожалуй, го своей значимости с первым в мире рейсом советского человека в космос, явился полет многоместного корабля «Восход» - первой в мире советской космической лаборатории! Экипаж «Восхода» - советские ученые в области физико-технических и медицинских наук, а также командир-инженер - стал первым научным коллективом, который жил и работал в космосе.
Едва ли нужно говорить о том, какое важное значение для исследователя имеет возможность ему самому видеть и осмыслить то, что совершается в среде загадочной невесомости, в мире неведомых излучений, невиданного сияния Солнца и далеких звезд, среди мрака космической ночи, на грани света и тьмы, сменяющих друг друга каждые полтора часа.
Отныне ученому доступны не только сухие цифры и записи приборов, фото- и телеметрические пленки, показания датчиков. Нет, сейчас ему доступно свое, живое восприятие событий, чувство пережитого и виденного, ему предоставляется увлекательная возможность вести исследование так, как он этого пожелает, тут же анализировать полученные результаты и продвигаться далее. Не отстала в решении новых задач и космическая техника. На сей раз экипаж корабля «Восход» совершал свой полет в обычной одежде, в уютной кабине корабля, обеспеченной всеми условиями для работы и отдыха.
Полет корабля «Восход» происходил на больших высотах, чем предшествующие полеты, но возможность возвращения на Землю надежно гарантировалась запасной энергетической установкой. Такой ответственный и нелегкий этап, как приземление космического корабля, был выполнен безукоризненно, практически с нулевой скоростью касания, при помощи новой оригинальной посадочной системы.
Полетом отважного экипажа корабля «Восход» тт. В. М. Комарова, К. П. Феоктистова и Б. Б. Егорова открыта дорога в космос работникам науки, смелым исследователям и пытливым первооткрывателям. Изучение и планомерное освоение околоземного космического пространства уверенно продолжается советской наукой!
Одной из интереснейших проблем, несомненно, является организация дальних полетов к планетам Солнечной системы. В прошедшем году были осуществлены с экспериментальными целями два запуска автоматических межпланетных станций «Зонд-1» и «Зонд-2». В этих полетах проводилась отработка различных бортовых систем, необходимых для управления, ориентации, связи, для проверки научной аппаратуры, а также с целью отработки устройств терморегулирования и солнечного энергопитания, обеспечивающих необходимые условия на борту станций.
Удалось осуществить устойчивую радиосвязь с автоматической станцией, находящейся на удалении многих миллионов километров от Земли (ранее достигнутая дальность радиосвязи превышает сто миллионов километров). Впервые в космической технике для целей ориентации был успешно опробован плазменный движитель, что представляет большой интерес для межпланетных полетов.
При выполнении программы «Зонд» получены интересные практические данные и новые результаты, которые могут быть с успехом использованы в дальнейшем.
Интенсивное развитие исследований околоземного космического пространства является вместе с тем важным и необходимым условием для развития дальних межпланетных полетов. Видимо, со временем все большие по своим размерам и численности экипажа космические корабли будут совершать все более длительные полеты вокруг Земли. Основной состав космических экипажей будут составлять ученые самых различных специальностей. На борту кораблей появится самая разнообразная научная аппаратура и оборудование.
Было бы, например, непростительным упустить такую возможность, как осуществление астрономических наблюдений непосредственно с борта космического корабля без помехи со стороны земной атмосферы, во все века мешавшей астрономам вести наблюдения. Можно ожидать, что с помощью кораблей-спутников получат широкое развитие служба погоды, служба Солнца и найдут свое решение такие чисто прикладные задачи, как космическое радио- и телевизионная связь, служба навигации для морских судов и самолетов и, наконец, сперва почтовые, а затем и пассажирские сообщения через космос между удаленными районами земного шара.
Плавая в космическом океане, человек должен научиться выходить из корабля и свободно передвигаться в пространстве для наблюдений и для работы, например для ремонта, для монтажа научного оборудования, устанавливаемого рядом со своим кораблем, что вполне осуществимо в среде невесомости. По всей видимости, окажется необходимой достаточно простая техническая система для встречи на орбите, стыковки и взаимодействия космических кораблей, а также для удобной и надежной их связи с Землей. Появятся орбитальные долго существующие в космосе обитаемые спутники-станции с периодически заменяемым научным и обслуживающим персоналом.
Немаловажное значение при этом приобретают вопросы экономичности и наибольшей надежности в эксплуатации, при выборе тех или иных технических решений, при создании новых космических систем.
Одной из самых важных современных проблем является тщательное изучение влияния условий невесомости на человеческий организм при длительном пребывании в космосе. Будет ли необходимо создание «искусственной тяжести» (быть может, даже периодически, на короткое время) либо это окажется ненужным; какие изменения в человеческий организм при длительном пребывании в космосе внесут условия невесомости, различные излучения и многие другие еще малоизученные факторы. Безграничный космический океан станет в ближайшие годы одной из самых крупных областей приложения новейших человеческих познаний в различных областях науки и техники для того, чтобы люди в космосе могли надежно и безопасно работать и отдыхать.
А за всем этим виднеются еще бескрайние космические дали, издавна привлекавшие внимание человечества! Это другие миры, быть может, иная, отличная от земной жизнь, далекие неведомые Солнца со своими планетами-спутниками. Все это еще впереди, но в первый день наступающего нового космического года хочется верить, что и эти дали будут достигнуты советской наукой!
О значении выхода человека в открытый космос1
[1965 г.]
1 Текст выступления С. П. Королева перед журналистами в марте 1965 г. в связи с полетом космического корабля «Восход-2». Выступление впервые было опубликовано на третьей звуковой странице журнала «Кругозор» (1966 г., № 4) и затем в сборнике «Из истории авиации и космонавтики». М., 1975, вып. 5, с. 3-5.
За последние короткие годы, когда на наших глазах совершено столько полетов в космос, мы незаметно переходим к иному качеству. Сначала летали одноместные корабли, сейчас пошли трехместные, и вот идет двухместный корабль. Можно заранее сказать, что вряд ли теперь будут летать одноместные корабли. И я думаю, что не ошибусь, если предскажу и следующий шаг. Наверное, скоро возникнет вопрос о том, что вряд ли есть смысл такие дорогостоящие системы, как космические корабли, запускать на несколько суток в космос. Наверное, надо их запускать на орбиту и оставлять там на весьма длительное время. А снабжение этих кораблей всем необходимым, а также доставку и смену экипажа производить при посредстве упрощенных типов космических аппаратов, которые, естественно, должны иметь шлюзование для того, чтобы выполнить свои функции, подстыковываясь к системе кораблей на орбите.
Так что вот так мы незаметно продвигаемся по пути качественного изменения наших представлений и наших направлений работы по освоению космического пространства пока в ближнем космосе, при орбитальных полетах у Земли.
И если говорить о более длительных и более дальних полетах, то, конечно, понятно, что не могут же корабли летать настолько обособленно, что один корабль не может иметь никакой связи с другим кораблем, один экипаж, иначе как по радио, не может иметь связь с другим экипажем, так как тут исключаются вопросы взаимной выручки, надежности, дублирования, чего хотите, даже самого простого человеческого общения и помощи. На вопрос, зачем нужно выходить в космос, я думаю, очень просто можно ответить. Собственно говоря, летая в космосе, нельзя не выходить в космос, как, плавая, скажем, в океане, нельзя бояться упасть за борт и не учиться плавать. Значит, это связано с целым рядом операций, которые могут потребоваться при встрече кораблей, при необходимости проведения специальных наблюдений в космосе (кстати, это очень сильно упрощает проведение этих наблюдений), ну и, наконец, в тех случаях, когда нужно будет что-либо поправить на корабле.
Мы, например, всерьез думаем над тем, что космонавт, вышедший в космос, должен уметь выполнить все необходимые ремонтно-производственные работы, вплоть до того, что произвести нужную там сварку и т. д. Это не фантастика, это - необходимость, и чем больше люди будут летать в космосе, тем больше эта необходимость будет ощущаться.
Наконец, надо считаться и с таким фактором, что ведь может, в конце концов, сложиться такая ситуация, когда один корабль должен оказать помощь другому. Но каким же образом? Ведь корабли представляют собой очень защищенные в тепловом, а значит, и в прочностном отношении конструкции. Значит, можно подойти к кораблю и ничего не сделать, потому что если его просто разгерметизировать через входной люк, то люди там погибнут. Значит, должна быть отработана такая система шлюзования, жизнеобеспечения и выхода из корабля, которая бы давала возможность оказать такую помощь. Тут можно, конечно, и пофантазировать немного, сказать, что, может быть, особенно если будут большие корабли, они очень близко и не будут подходить, может быть, даже на десятки километров, они, скажем, будут друг друга видеть радиотехнически.
Спрашивается, как перейти тогда с одного корабля на другой? Наверное, все-таки не в скафандре с индивидуальным кислородным прибором и каким-то небольшим двигателем. Тогда уже надо делать какое-то космическое такси, космическую шлюпку, с тем чтобы обеспечивать передвижение на такое длительное расстояние, потому что это целесообразнее и в весовом отношении, и в тепловом, и по всем запасам, и по безопасности. Наверное, все-таки, пуская человека, как песчинку, в космосе, допустим, на двадцать километров, ему надо дать тогда такой приклад, что лучше сделать такси. Ему надо дать возможность видеть свой корабль и тот корабль, куда он идет. Дать возможность ему вернуться на свой корабль и к тому кораблю, к которому он идет, иметь с ним связь на всякий аварийный случай, для дублирования и прочее. Да, проще тогда сделать какую-то легкую штуку, не связанную с земной тяжестью, которая вам позволит передвигаться в открытом космосе.
В заключение большое всем спасибо за поздравления. Я могу их только отнести к большому коллективу разработчиков и испытателей, которые создали и провели этот сложнейший эксперимент. Надо сказать, что первый выход человека в космос - это событие в космических исследованиях очень крупное. Я бы сказал, событие, которое откроет путь к большому направлению в разработке космических аппаратов и в космических исследованиях.
Шаги в будущее1
[1966 г.]
Ум человеческий открыл много диковинного в
природе и откроет еще больше,
увеличивая тем свою власть над ней.
В. И. ЛЕНИН |
1 Статья С. П. Королева, опубликованная в газете «Правда» от 1 января 1966 г. под псевдонимом «Профессор К. Сергеев». Переиздана с некоторыми сокращениями в книге «Эпоха - газетной строкой». "Правда" 1917 - 1967" (М., 1967, с. 384-386) со следующим предисловием: «На протяжении нескольких лет в номерах "Правды", датированных первым днем нового года, появлялись статьи, подписанные профессором К. Сергеевым. Сегодня можно назвать подлинное имя автора этих увлекательных статей. Это был академик Сергей Павлович Королев, который внес большой личный вклад в освоение космического пространства и которого советские летчики-космонавты называли своим отцом.
Мы печатаем здесь его статью „Шаги в будущее", опубликованную „Правдой" 1 января 1966 г. Она стала своеобразным завещанием крупнейшего советского ученого».
В современной науке нет отрасли, развивающейся столь же стремительно, как космические исследования. Немногим более восьми лет прошло с тех пор, как впервые во Вселенной появилось созданное человеком космическое тело - первый советский искусственный спутник Земли. Всего около трех тысяч дней насчитывает история космонавтики, а между тем она так богата важнейшими для человечества событиями, что в ней можно выделить целые эпохи.
Полет Юрия Гагарина открыл эпоху космической навигации. А эпоха работы человека в свободном космосе началась в истекшем 1965 году в тот мартовский день, когда Алексей Леонов шагнул из шлюза в открытое пространство и свободно поплыл в нем. Перед экипажем корабля «Восход-2» была поставлена труднейшая, качественно иная, чем в предыдущих полетах, задача. От ее успешного решения зависело дальнейшее развитие космонавтики, пожалуй, не в меньшей степени, чем от успеха первого космического полета. Павел Беляев и Алексей Леонов справились с ней, и значение этого подвига трудно переоценить: их полет показал, что человек может жить в свободном космосе, выходить из корабля, не чувствовать себя ограниченным его стенами, он может работать всюду так, как это окажется необходимым. Без такой возможности нельзя было бы думать о прокладывании новых путей в космосе. Ведь это было бы равнозначно тому, например, что экипаж морского судна во время плавания не может выйти из своего корабля и даже опасается это сделать. В наше время уже можно себе представить, что в будущем космические корабли с людьми пойдут в дальние рейсы - к Луне, к планетам и к их спутникам. Надежность таких экспедиций повысится, если посылать не один корабль, а два или более. Несомненно, что во время такого полета людям понадобится перейти из одного корабля в другой для оказания помощи либо осмотра или ремонта в полете, что существенно повысит надежность всей экспедиции. Выход в открытый космос облегчит проведение некоторых научных исследований, так как условия для этого могут оказаться лучше, чем в корабле. Мы знаем теперь, что при современной технике все это вполне реально и доступно. Полет корабля «Восход-2» доказал это экспериментально.
Особенность эксперимента Леонова была в том, что он выходил в свободный космос через шлюзовую камеру, без разгерметизации всего корабля. Павел Беляев находился все время в герметической кабине в отличных условиях, поддерживал связь с Землей, следил за передвижением и действиями товарища и производил операции по управлению полетом.
Такая программа эксперимента единственно правильна и обоснована методически. Это становится ясным, если задуматься: зачем нужен выход человека в космос? Ответ простой - для оказания помощи соседнему кораблю и для работы. Разгерметизация корабля, несомненно, затруднит все работы. Конечно, выход в свободный космос через специальный шлюз осуществить технически сложнее, и, главное, для этого нужно предусмотреть на борту довольно значительный запас веса. Но только этот путь полностью решает задачу, ради которой, собственно, и делается выход в свободный космос.
Итоги только что закончившегося года интересны еще и тем, что, кроме спутников Советского Союза и США, в космос был запущен французский искусственный спутник Земли. Земной шар непрерывно опоясывается многочисленными трассами орбитальных полетов, и минувший год еще умножил их число. Американские космонавты Ловелл, Борман, Ширра и Стаффорд совершили смелые полеты (двое первых - длительностью до четырнадцати суток) и почти вплотную сблизили в космосе свои корабли, что, несомненно, является их серьезным достижением. Большое число советских спутников на околоземных орбитах выполнило и выполняет самые различные научные и исследовательские задачи. Прилегающая к Земле область космического пространства, можно считать, основательно обжита. Спутники серии «Космос» неутомимо выполняют обширнейшую комплексную научную программу исследований. Успешно проводился полет спутников «Протон-1» и «Протон-2». «Молния-1» систематически передает через космос на Дальний Восток телевизионные программы г телефонные переговоры; осуществлена и цветная телевизионная передача во Францию. Система ретрансляции связи через спутник типа «Молния-1», как показывают расчеты, выгодна экономически для народного хозяйства. Она может сэкономить не один десяток миллионов рублей. Дальнейшее развитие системы околоземных спутников даст возможность осуществить прогнозирование погоды, службу солнечных наблюдений и геофизических исследований в таком объеме, который недоступен в обычных земных условиях. Орбитальные полеты в околоземном космическом пространстве в дальнейшем могут быть с успехом и эффективно использованы при решении ряда задач для народного хозяйства, продолжались в истекшем году и исследования более далеких космических объектов. Современные наука и техника с их необычайно развитыми средствами автоматизации, телеинформации и управления процессами позволяют широко использовать автоматические межпланетные станции для дальних полетов к Луне и к ближним планетам Солнечной системы.
Советская экспериментальная станция «Зонд-3», которая была запущена 18 июля 1965 г., а сейчас находится от Земли на расстоянии около 95 млн. км, проделала огромную и интереснейшую работу. С борта «Зонда-3» были сделаны уникальные фотоснимки обратной стороны Луны и переданы на Землю. Эти высокого качества снимки позволили астрономам составить представление о структуре поверхности всей обратной, невидимой с Земли, стороны Луны. В настоящее время имеется достаточно подробная информация о всей поверхности Луны, на основании чего в скором времени будут составлены и выпущены полные карты и полный глобус Луны.
Первая обработка полученных данных подтвердила вывод, сделанный ранее, после первых советских фотографий Луны, об отличии обратной ее стороны от той половины, которую мы видим. Обращенная к Земле северная часть лунного полушария покрыта в основном впадинами, которые по традиции астрономы называют «морями», а северная часть обратной стороны представляет гигантскую материковую возвышенность, изрезана многочисленными кратерами разной величины.
Со станцией «Зонд-3» и по сей день поддерживается устойчивая связь, с ее борта продолжает поступать телеметрическая информация. На одном из сеансов связи была проведена повторная передача с расстояния около 32 млн. км ранее отснятых и уже переданных па Землю фотокадров обратной стороны Луны. Качество полученных снимков было вполне удовлетворительным. В первой половине ноября 1965 г. были запущены к Венере две автоматические станции - «Венера-2» и «Венера-3». В это время расстояние между Землей и Венерой составляло около 99,3 млн. км. Сейчас станции удалились от Земли на расстояние около 15 млн. км. Весь путь, который предстоит пройти станциям до их сближения с Венерой, составит около 290 млн. км. В это время расстояние между Землей и Венерой будет около 61,5 млн. км. В конце февраля - начале марта 1966 г. станции «Венера-2» и «Венера-3» достигнут района планеты Венера.
Венера плохо поддается наблюдениям и изучению с Земли, поскольку она окутана плотной, непроницаемой атмосферой, открытой еще в 1761 г. М. В. Ломоносовым. Существуют предположения, что давление атмосферы на поверхности Венеры достигает четырех и более атмосфер, а температура до +400° С. По своим размерам, диаметру, массе и расположению по отношению к Солнцу Венера является планетой, на которой можно было бы предположить наличие органической жизни, если бы не столь крайние и противоречивые данные о температурном режиме и характеристиках ее атмосферы. Очень большой интерес представляет получение хотя бы косвенных данных, которые позволили бы судить о состоянии и основных физических характеристиках самой поверхности Венеры.
Однако это только первые шаги. В дальнейшем для более полного и систематического накопления необходимых сведений о Луне и хотя бы о ближних к Земле планетах, несомненно, потребуется проведение серьезных и длительных исследований. В ближайшее время разовые полеты автоматических станций уже не будут в сколь-либо достаточной мере удовлетворять запросы науки. Период первых сенсационных открытий и первых фотографий, сделанных с дальних расстояний и не имеющих систематического характера, окажется явно недостаточным. Нет необходимости говорить о том, как давно, как сильно и неотвратимо Луна привлекала внимание людей. Мечтой человечества было желание, чтобы сын Земли, наконец, ступил на нетронутую поверхность Луны! К сожалению, эта задача не такая простая и не столь близкая к осуществлению.
Луна - этот естественный и вечный наш спутник - имеет существенные отличия от Земли. На Луне отсутствует атмосфера. Там нет также заметного магнитного поля и радиационных поясов. Сила тяжести на поверхности Луны составляет примерно одну шестую земной.
В этих необычных, присущих только Луне условиях заложены огромные возможности для научных исследований, совершенно недоступных на Земле.
Земная атмосфера поглощает излучение небесных тел озоном, водяным паром и углекислотой, оставаясь прозрачной лишь в сравнительно узком «оптическом» участке спектра. В радиодиапазоне также имеется только узкая область, где земная ионосфера, отражающая идущее из космоса излучение, делается прозрачной. Большой интерес представляют исследования самой Луны, физических условий на лунной поверхности, изучение фигуры Луны, сейсмическое, гравитационное и магнитное исследования, крупномасштабное картографирование и т. п. Важное значение будут иметь для теории происхождения Солнечной системы исследования истории развития лунных образований. Отсутствие атмосферы и находящейся в свободном состоянии воды, по всей вероятности, привело к тому, что на лунной поверхности сохранились в первозданном виде в течение многих миллионов лет древнейшие образования.
Трудные задачи должны быть разрешены автоматическими станциями, предназначенными для мягкой посадки, причем сама станция и вся ее аппаратура должны полностью сохраниться и функционировать, выполняя заданную программу. Лунная автоматическая станция должна доставить надежную и достаточно широкую информацию о характеристиках грунта. Переданные фотографии должны при этом охарактеризовать неровности почвы, для чего необходима высокая степень разрешения. Все сказанное - увлекательные планы исследования Вселенной, это шаги в будущее. Это будущее, хотя и не столь близкое, но реальное, поскольку оно опирается на уже достигнутое. Каждый космический год - это новый шаг вперед отечественной науки по пути познания сокровенных тайн природы. Наш великий соотечественник К. Э. Циолковский говорил: «Невозможное сегодня, становится возможным завтра». Вся история развития космонавтики подтверждает правоту этих слов. То, что казалось несбыточным на протяжении веков, что еще вчера было лишь дерзновенной мечтой, сегодня становится реальной задачей, а завтра - свершением. Нет преград человеческой мысли!
назад