НОВОСТИ КОСМОНАВТИКИ №11 — 2003
| ЗАПУСКИ КОСМИЧЕСКИХ АППАРАТОВ |
Европа впервые исследует Луну
(SMART-1 – экспериментальная европейская АМС)
И.Лисов.
«Новости космонавтики»
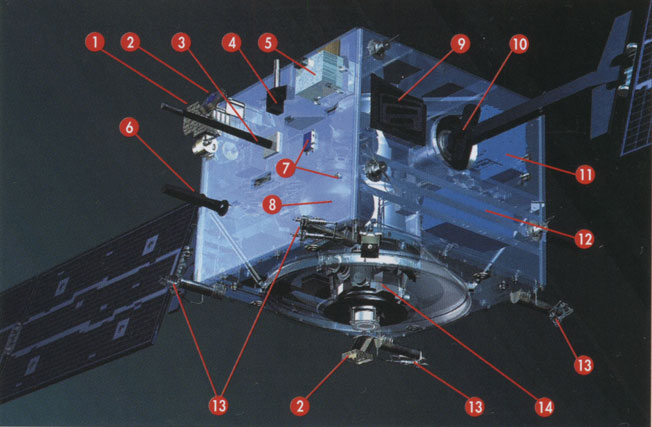
1 — спектрометр SIR; 2 — солнечные датчики; 3 — аппаратура SPEDE; 4 — камера AMIE; 5 — рентгеновский спектрометр D-CIXS; 6 — связная антенна; 7 — датчики EPSP; 8 — топливный бак для двигателей системы ориентации и стабилизации; 9 — звездный датчик; 10 — привод СБ; 11 — приемопередатчики диапазона S; 12 — система управления ЭРД; 13 — микроЖРД системы ориентации и стабилизации; 14 — ЭРД с механизмом поворота |
27 сентября в 23:56 UTC начался самостоятельный полет европейского КА SMART-1 – экспериментальной АМС с двойной задачей: отработать электрореактивную ДУ для будущих миссий к Меркурию и Солнцу и провести обширные исследования Луны с орбиты ее спутника.
В сообщениях о запуске основной упор делался именно на научную сторону проекта: на то, что SMART-1 – первый европейский КА для исследования Луны. «Европа может гордиться, – заявил после запуска генеральный директор ЕКА Жан-Жак Дордэн, – мы снова прокладываем курс к Луне. И это только начало: мы готовимся достичь намного большего». Однако отработка перспективных технологий на SMART-1 все же является главной задачей полета, а список их почти слово в слово повторяет те, что были испытаны на американской станции Deep Space 1 (НК №23/24, 1998; №1, 1999).
Вообще интересно сравнить между собой (см. таблицу) три экспериментальных АМС с ЭРДУ: американскую Deep Space 1 (запуск 24.10.1998, завершение работы 18.12.2001), японскую Muses-C (запуск 09.05.2003) и европейскую SMART-1. По техническим характеристикам все три очень близки, но американский аппарат был заявлен как чисто экспериментальный с полным подчинением научной программы задачам испытаний новых систем КА. У европейской и японской станции научная программа изначально имеет самостоятельную ценность.
Важнейшим отличием SMART-1 является способ запуска. Американский и японский аппарат были главными полезными грузами своих ракет, в то время как SMART-1 запущен попутно, в дополнение к штатному запуску спутников связи на геопереходную орбиту. Понятно, что такой запуск намного дешевле целевого.
Решение о реализации проекта SMART-1 было принято в ноябре 1999 г. (НК №1, 2000). Он стал первым в одноименной программе, название которой расшифровывается как Small Missions for Advanced Research in Technology – Малые миссии для перспективных исследований в области технологии.
| Параметр | Deep Space 1 | SMART-1 | Muses-C |
Стартовая масса, кг
в т.ч. ксенон, кг
Размеры корпуса, м
Размах СБ, м
Мощность СЭП, Вт
в т.ч. для питания ЭРДУ
Максимальная тяга ЭРДУ, мН
Удельный импульс, м/с
Суммарное расчетное приращение скорости, м/с
Масса научной ПН, кг
Заявленный ресурс, лет
Стоимость |
486
81.5
1.1x1.1x1.5
11.8
2400
2150
90
30500
3500
18
0.75
160 млн $ |
367
82
1.57x1.15x1.04
14
1900
1350
73
16400
3000
19
2-2.5
110 млн евро |
530
65
1.5x1.5x1.05
...
1400
...
4x7.7
29200
4000
...
2.7
150 млн $ |
Головной контракт на SMART-1 ЕКА выдало Отделению космических систем Шведской космической корпорации SSC (Swedish Space Corp., г. Солна, Швеция). В качестве субподрядчиков выступили более 15 фирм и организаций из шести стран Европы. Научные эксперименты и экспериментальные технологические решения подготовили исследователи из девяти европейских стран, ЕКА и США.
Механический макет КА был изготовлен весной 2001 г. и отправлен на испытания – вибрационные, ударные, акустические. Летный экземпляр начали собирать осенью 2001 г., а вся научная аппаратура была поставлена в августе 2002 г. Аппарат прошел затем серию механических, электрических и тепловых испытаний, и запуск планировали совместно с КА Satmex-6 на 13 июня 2003 г. В ноябре 2002 г. появилась возможность поставить его пораньше, на 25 марта, со спутниками Optus C1 и e-Bird, но следствием декабрьской аварии стала отсрочка до 15 июля. Наконец, поменялся один из «попутчиков», и запуск назначили на 22 августа. 15 июля аппарат был доставлен в Куру для подготовки к старту и запущен с месячной задержкой.
| Массированное исследование Луны космическими аппаратами прекратилось в 1976 г., и с тех пор лишь считанные КА доставили научные данные о Луне. Это японская пара Hiten/Hagoromo (1990) и американские аппараты: военно-исследовательская станция Clementine 1 (1994), Lunar Prospector (1998), а также станция Galileo, дважды (1990 и 1992) сближавшаяся с Землей и Луной по пути к Юпитеру.
Запуском SMART-1 начинается новая серия исследований Луны. За ним последуют японские станции Lunar-A и Selene (2005), лунные орбитальные аппараты Китая (2007) и Индии (2008) и, вероятно, миссия NASA по доставке грунта из южнополярного бассейна Эйткена (2009). |
Новые технологии SMART-1
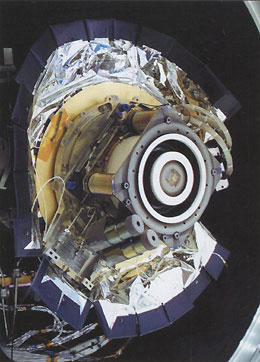
Главная солнечная электрическая ДУ PPS-1350-G французской компании Snecma Moteurs – основное новшество SMART-1. В ее состав входят холловский электростатический двигатель, система подачи и распределения электропитания и запас рабочего тела (ксенона) – 82 кг. Ускорение ионов ксенона происходит за счет эффекта Холла (возникновение электрического поля при протекании тока в магнитном поле). Двигатель с кольцеобразной керамической камерой внешним диаметром 100 мм и внутренним 56 мм развивает тягу до 70 мН (7 гс) при удельном импульсе 16400 м/с. Рабочее напряжение двигателя – 350 В, ток – 3.8 А, потребляемая мощность – 1350 Вт, расход рабочего тела – 4.2 мг/с, КПД – 51%. Двигатель оснащен двухстепенным механизмом поворота, позволяющим сохранять правильное направление вектора тяги по мере израсходования рабочего тела.
Если испытания ЭРДУ на борту SMART-1 будут успешными, аналогичной ДУ может быть оснащена станция BepiColombo для исследования Меркурия и будущий солнечный зонд ЕКА.
В перечень перспективных технологий SMART-1 также вошли:
● — литий-ионная модульная бортовая аккумуляторная батарея;
● — экспериментальная аппаратура KaTE (X/Ka-band Telemetry and Telecommand Experiment) высокоскоростной связи и управления в диапазонах X (7/8 ГГц) и Ka (32/34 ГГц). Аппаратура массой 6.2 кг разработана фирмой Astrium GmbH (Германия) и будет использоваться совместно с наземным терминалом XkaT в Нордвейке – как для экспериментов, так и для штатной работы в случае недоступности 35-метровой антенны Нью-Норсия в Австралии;
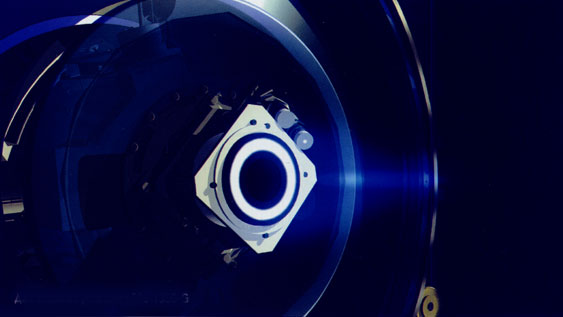
Двигательная установка PPS-1350-G |
● — лазерная связь (Laser-Link Experiment). С помощью камеры AMIE аппарат должен обнаружить лазерный луч на волне 847 нм с оптической станции ЕКА при обсерватории Тейде на о-ве Тенерифе. Передача какой-либо информации не планируется.
● — бортовое ПО автономной навигации OBAN (On-Board Autonomous Navigation) для определения положения КА в космосе. Разработанный силами ЕКА алгоритм OBAN использует изображения с камеры AMIE и звездных датчиков – положения опорных звезд, Земли, Луны и астероидов. В полете SMART-1, однако, он будет проводиться «в открытом контуре» – собранные данные будут передаваться на Землю без использования на борту. Этот эксперимент является частью европейской исследовательской и технологической программы по автономной навигации АМС;
 ДУ PPS-1350 разработана Snecma Moteurs в сотрудничестве с российским ОКБ «Факел» (Калининград) на базе двигателя СПД-100 и была впервые установлена на экспериментальном КА Stentor, потерянном в результате аварийного запуска 11 декабря 2002 г. ДУ PPS-1350 разработана Snecma Moteurs в сотрудничестве с российским ОКБ «Факел» (Калининград) на базе двигателя СПД-100 и была впервые установлена на экспериментальном КА Stentor, потерянном в результате аварийного запуска 11 декабря 2002 г.
В 1993 г. ОКБ «Факел», Space Systems/Loral, Snecma Moteurs и Atlantic Research Corp. образовали совместное предприятие International Space Technology Inc. с целью маркетинга российского стационарного плазменного двигателя СПД-100 (SPT-100). К настоящему времени эти двигатели установлены не только на отечественных КА «Галс» и «Экспресс» и российско-французском SESat'е, но и на ряде зарубежных геостационарных аппаратов (Stentor, Intelsat X, некоторые аппараты семейства Astra).
Для новой европейской платформы Alphabus с системой электропитания мощностью 12-20 кВт Snecma и «Факел» разрабатывают более мощную плазменную ДУ PPS-5000 с увеличенным до 20000 м/с удельным импульсом. Соглашение о ее разработке, производстве и маркетинге было подписано на авиасалоне Ле-Бурже 20 июня 2003 г. |
Научная аппаратура SMART-1
На борту станции установлены шесть научных приборов суммарной массой 19 кг. Их разработку осуществили исследовательские группы, возглавляемые представителями Британии, Германии, Италии, Финляндии и Швейцарии.

Камера AMIE
|
Миниатюризированная ПЗС-камера AMIE (Asteroid/Moon Micro-Imaging Experiment, Эксперимент по микросъемке Луны и астероидов) предназначена для цветной съемки с высоким разрешением и высокой чувствительностью поверхности Луны, и в особенности ее плохо освещенных полярных областей. Поле зрения камеры – 5.3x5.3°, регистрирующая ПЗС-матрица имеет размер 1024x1024, разрешение – 30 м с высоты 300 км, используемые фильтры – панхроматический, красный (750 нм), ближний ИК (900 и 960 нм) и для лазера (847 нм). Камеру массой всего 0.45 кг (2.1 кг вместе со всеми интерфейсами) изготовил Швейцарский центр электроники и микротехники в г. Невшатель, научный руководитель – Жан-Люк Жоссе.
Компактный спектрометр ближнего инфракрасного диапазона SIR (SMART-1 Infrared Spectrometer) будет использован для картирования минералов (пироксен, оливин, полевой шпат и т.п.)  на поверхности Луны, для исследования природы подповерхностных слоев, обнаженных при кратерировании и в трещинах, и для поиска отложений льда и твердой углекислоты в постоянно затененных полярных кратерах, где температура не поднимается выше 100 К.
на поверхности Луны, для исследования природы подповерхностных слоев, обнаженных при кратерировании и в трещинах, и для поиска отложений льда и твердой углекислоты в постоянно затененных полярных кратерах, где температура не поднимается выше 100 К.
SIR имеет 256 каналов в пределах между 0.93 и 2.4 мкм при спектральном разрешении 0.06 мкм и пространственном разрешении до 300 м. По последнему параметру он сравним со спектрометром КА Clementine (200 м), но, имея лишь шесть каналов, этот прибор не мог точно описать существующие смеси и подтипы лунных минералов. Спектрометр установлен соосно с камерой AMIE и во время перелета будет использоваться для измерения ИК-спектров звезд. SIR разработали в германском Институте аэрономии имени Макса Планка под руководством Уве Келлера, его масса – 2.3 кг.
Опытный компактный (4.5 кг) видовой рентгеновский спектрометр D-CIXS (Demonstration Compact Imaging X-ray Spectrometer) составит первую глобальную карту элементного состава Луны с разрешением 50 км. Этот спектрометр на диапазон 0.5–10 кэВ с полем зрения 12x32°, с очень легким, но эффективным микроколлиматором, использует новый тип детекторов (24 штуки, с рабочей поверхностью 10x10 мм2 и энергетическим разрешением 200 эВ), более радиационно стойких, чем ПЗС, и будет проводить флюоресцентную спектроскопию – регистрировать рентгеновские кванты, порожденные в грунте Луны солнечным и космическим излучением. Основные элементы, которые он будет картировать, – магний, алюминий и кремний.
Аппаратуру создала группа проф. Мануэля Гранде в британской Лаборатории Резерфорда-Эпплтона (RAL) для решения многих вопросов, и в частности – о том, обеднена ли Луна железом по сравнению с алюминием и магнием. Именно такой она должна быть, если справедлива популярная сейчас гипотеза о формировании Луны из обломков, образовавшихся в грандиозном столкновении прото-Земли и другого тела размером с Марс, но надежные данные (с Apollo 15 и 16) имеются лишь для 9% лунной поверхности. Во время перелета спектрометр D-CIXS будет исследовать авроральные сияния и хвост магнитосферы Земли и – если повезет – близкие кометы.
Рентгеновский солнечный монитор XSM, входящий в состав D-CIXS, будет использоваться для спектрометрических наблюдений Солнца в диапазоне 0.8–20 кэВ и для правильной интерпретации данных спектрометра в условиях разного уровня солнечной активности. Постановщик эксперимента – Юхани Хуовелин из Обсерватории Хельсинкского университета (Финляндия).
Аппаратура EPDP (Electric Propulsion Diagnostic Package – Блок диагностики электрореактивной ДУ) массой 2.4 кг предназначена для наблюдения за работой ЭРДУ и воздействием на среду вокруг КА и его конструкцию. В принципе ожидается воздействие физическое (эрозия и перераспределение материала плазмой), механическое (вращательный момент, отражение струи от элементов конструкции КА), тепловое (нагрев) и электрическое (потенциалы, радиопомехи).
Датчики EPDP располагаются на нижнем днище корпуса КА, в 80 см от двигателя. Анализатор запаздывающего потенциала будет измерять энергию ионов низких энергий и конфигурацию плотности тока. Пара зондов Лэнгмюра будет измерять потенциал плазмы, плотность и температуру электронов с двух сторон от КА. На отдельном фотоэлементе и на кварцевом датчике будет изучаться осаждение загрязнений. Разработчик EPDP – Джованни Ночи, компания Laben/Proel, Флоренция, Италия.
Также для контроля работы электрореактивной ДУ служит аппаратура SPEDE (Spacecraft Potential, Electron & Dust Experiment – Эксперимент [по изучению] потенциала КА, электронов и пыли). Два датчика SPEDE общей массой 0.8 кг размещены на боковых поверхностях КА на штангах длиной 60 см и могут использоваться либо как зонды Лэнгмюра, либо для измерения электрического поля. Во время работы ЭРДУ они будут контролировать ее вместе с EPDP, а затем – исследовать взаимодействие солнечного ветра с Луной. Аппаратура SPEDE создана в Финском метеорологическом институте под руководством А.Малкки.
Во многих публикациях этот список приборов дополнен аппаратурой KaTE и экспериментами по автономной навигации и лазерной связи, описанными выше.
KaTE

|
Еще один эксперимент – RSIS (Radio Science Investigation with SMART-1) имеет две цели: контроль разгона КА по изменению радиосигнала и обнаружение либрации (колебаний относительно направления на Землю) Луны с использованием бортовых звездных датчиков, радиоаппаратуры KaTE и камеры AMIE. Его поставили специалисты Римского университета. Определение параметров вращения небесного тела с борта его спутника будет проводиться впервые. Ключ к этому – точное определение текущей ориентации КА (4ˊˊ), дальности и радиальной скорости в процессе съемки с умеренным разрешением (50 м в подспутниковой точке с высоты 300 км). Аналогичный, но более сложный эксперимент планируется поставить на КА BepiColombo для изучения внутреннего строения Меркурия, и хорошо известная либрация Луны служит как бы «полигоном» для отработки.
Служебные системы
Объявленная стартовая масса SMART-1 – 366.5 кг. Силовой набор (42 кг) изготовлен из алюминиевых элементов и имеет в своем составе центральный опорный конус, четыре боковые панели и два днища, верхнее и нижнее.
В системный модуль КА входят бортовой компьютер (одночипный ERC-32 с тактовой частотой 20 МГц, восемью картами периферийных устройств и запоминающим устройством на 4 Гбит), модуль телеметрии и управления, две шины данных типа CAN-bus (системная и полезной нагрузки), блок пиросредств и четыре «удаленных терминала» для бортовых устройств, не имеющих интерфейса CAN-bus.
Электропитание осуществляется от ориентируемых солнечных батарей с фотоэлементами на арсениде галлия и фосфиде индия, а в тени – от аккумуляторной батареи (5x44 А·ч). Бортовая шина питания использует напряжение 50±0.5 В.
Система стабилизации и ориентации трехосная, использует три солнечных и два звездных датчика, пять датчиков угловой скорости, четыре маховика и восемь микроЖРД на гидразине тягой по 1 Н. Она обеспечивает заданную ориентацию на лунной орбите осью Z в надир с погрешностью не более 0.5ˊ.
В подсистеме связи используются два приемопередатчика диапазона S. Канал «Земля-борт» использует частоту 2058.15 МГц при пропускной способности 2 кбит/с. Канал «борт-Земля» имеет передатчик мощностью 5 Вт с частотой 2235.1 МГц и работает в одном из двух режимов: 2.06 или 66 кбит/с. Аппарат имеет два типа антенн: ненаправленные LGA и малонаправленные MGA.
Менеджер проекта от ЕКА – Джузеппе Ракка (Giuseppe Racca), научный руководитель SMART-1 – Бернард Фоинг (Bernard H. Foing). От Шведской космической корпорации проектом руководил Петер Ратсман (Peter Rathsman).
Начало полета
Первым днем работы SMART-1 стало 28 сентября. Аппарат успешно развернул солнечные батареи и автоматически сориентировался на Солнце. Специалисты Европейского центра космических операций в Дармштадте запросили и получили с борта телеметрию, записанную во время выведения, и приступили к проверке аппарата.
К вечеру 29 сентября операторы убедились, что все основные системы КА в порядке, и подкорректировали порядок обработки на борту одиночных сбоев компьютера, вызванных воздействием космического излучения на оперативную память. В этот же день к 15:30 UTC был проверен и спектрометр D-CIXS: калибровка его прошла с ожидаемыми результатами.
Уже на 4-м витке, 30 сентября в 12:25, был в первый раз включен и электрореактивный двигатель PPS-1350-G. После вентилирования ксеноновых магистралей (нужно было полностью избавиться от кислорода и паров воды) двигатель проработал 50 минут на основном катоде и еще 6 минут на полной тяге на запасном. Аналогичный тест был проведен несколько месяцев назад в вакуумной камере на Земле; в условиях реального космоса двигатель работал даже лучше. Правда, второй режим ему «не понравился»: вслед за сильными электрическими колебаниями произошла остановка двигателя.
Траектория полета SMART-1
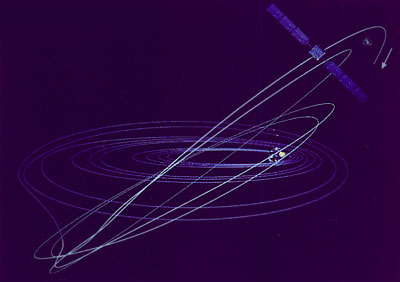 |
После тщательной проверки электрической схемы ЭРДУ была включена вновь и успешно проработала 2.5 часа на основном катоде. Последовательность запуска двигателя была оптимизирована так, чтобы ограничить колебательный эффект, а логика регулятора давления изменена, чтобы избежать скачков тока и напряжения.
В этой новой конфигурации к 6 октября ЭРДУ отработала 29 часов, израсходовала 300 г ксенона, подняла перигей КА на 300 км и была признана годной к выполнению программы полета.
«Приемка» SMART-1 должна закончиться через две недели после запуска; после этого операторы перейдут на режим с двумя 8-часовыми сеансами связи в неделю. Дальнейший план полета выглядит так. В первую очередь нужно «вытащить» перигей из области радиационных поясов. Поэтому примерно 80 суток ЭРДУ будет работать почти постоянно (за исключением теневых участков орбиты), придавая станции ускорение около 0.2 мм/с2. Это позволит постепенно поднять перигей с 750 до 20000 км; одновременно апогей вырастет до 68000 км.
После этого аппарат будет ускоряться уже вблизи перигея, чтобы поднять апогей орбиты примерно до 200000 км. На этих высотах КА будет регулярно сближаться с Луной, испытывая заметные «резонансные» возмущения. При правильном подборе периода обращения станции и условий встречи с Луной (она должна оказываться примерно в 15° впереди) орбита будет расширяться и дальше. Затем станция выполнит три пролета Луны на расстояниях от 60000 до 20000 км (в конце декабря 2004, января и февраля 2005 г.), и орбита поднимется примерно до 130000x400000 км.
В результате в марте 2005 г. КА пройдет через область точки либрации L1 системы «Земля-Луна» в 50–60 тыс км от Луны, и оттуда будет захвачен на околополярную эллиптическую орбиту спутника Луны с периселением в районе ее южного полюса. В течение нескольких следующих недель SMART-1 снизит ее до рабочей высоты 300x10000 км с использованием бортовой ЭРДУ. На все эти маневры уйдет около 60 кг ксенона.
Таким образом, от выведения на геопереходную орбиту в сентябре 2003 и до начала штатных научных наблюдений в апреле 2005 г. пройдет 1.5 года. Программа исследований Луны с орбиты спутника рассчитана по крайней мере на 6 месяцев.
В период перелета к Луне отдельные инструменты будут использоваться для астрономических наблюдений. В частности, с помощью спектрометра D-CIXS будут изучаться кометы и рентгеновские источники.
По материалам ЕКА, SSC, RAL