ОБЛИК ЛУННОГО КОРАБЛЯ
Как же посадить корабль на Луну? Какие нюансы нужно знать? Что учитывать? Что предусмотреть? Как спрогнозировать? На эти и многие другие вопросы нужно отвечать. Но кому? Проектировщикам NASA? Они были далеко, а из идеологических соображений вряд ли захотели бы помочь. Опыт создания космической техники, энтузиазм молодости вселял уверенность, что все проблемы мы одолеем. Созданный из разных коллективов проектный сектор по Лунному кораблю представлял тогда как бы единое творческое товарищество, помыслы которого были направлены на поиск оригинальных изобретательских решений по каждому агрегату корабля.
Но прежде чем «оттачивать» составные части, необходимо было обосновать и утвердить принятый облик ЛК. Первое представление о корабле, в части расчетных масс и габаритов, мы получили от ракетчиков-проектантов (рис.4).
Было видно невооруженным глазом, что они стремились к созданию легкого ракетного блока. Понимая, что объект будет более устойчивым при невысоком расположении центра масс, аппаратуру, обеспечивающую функционирование корабля при посадке, они поместили в специальный торовый отсек, который за счет своей деформации обеспечивал гашение остаточной кинематической энергии, а за счет своей формы — равностороннюю устойчивость объекта во всех направлениях при соприкосновении с поверхностью.
Прикинули «центровку» корабля, так называли мы высоту расположения центра масс корабля от «опорной» поверхности. Она оказалась порядка 2,5 м. Даже оценочные расчеты показали, что торовое лунное посадочное устройство (ЛПУ) при заданных размерах не обеспечивает устойчивость корабля на поверхности. К выбору ЛПУ мы еще вернемся в специальном разделе, но было ясно, что четырехлапая схема (каждая с двумя подкосами) наиболее оптимальна для посадочных аппаратов.
Понимая, что аппаратура, расположенная в торе, должна еще работать после посадки на Луне, ее сразу же перенесли в навесной приборный отсек. Рождается второй вариант схемы.
 Однако второй вариант схемы (рис. 5) не дал существенных преимуществ перед первым, так как только поднял центровку аппарата, а значит потребовал значительного увеличения базы ЛПУ. Под базой ЛПУ понимался размер между крайними точками опорного устройства.
Однако второй вариант схемы (рис. 5) не дал существенных преимуществ перед первым, так как только поднял центровку аппарата, а значит потребовал значительного увеличения базы ЛПУ. Под базой ЛПУ понимался размер между крайними точками опорного устройства.
Началась буквально мозговая атака на центровку. У входа в зал стоял большой кульман, и каждый предлагал свою схему в виде рисунка. Оставить свои предложения на кульмане мы, разработчики ЛК, просили каждого, кто к нам входил. Запомнился рисунок только что слетавшего в космос К.П.Феоктистова, который не только изобразил облик корабля, но дал оценку массы посадочных опор: приблизительно 800 кг.
На рисунке 6 показана схема аппарата в представлении нашего сотрудника В.Н.Шаурова, которому была поручена разработка кабины. Как хотелось в то время заглянуть в будущее и увидеть в металле аппарат!
Борьба за центровку и массу ЛК шла по всем направлениям. Это были и сама кабина экипажа, и ракетный блок, и посадочное устройство. Кабина экипажа — это не только дом, но и место работы. Для Лунного корабля кабина должна быть особой. Ведь из нее осуществлялось управление ЛК на участке посадки, выбор места посадки и обеспечение самой посадки. Хочешь — не хочешь, а высота ее должна быть выше человеческого роста, ведь управление при прилунении можно было осуществлять только стоя, так как была необходимость обеспечить обзор нижней сферы, т.е. смотреть вниз. Расположенные как в первой схеме (см. рис.4), приборные отсеки были неудобны и с точки зрения обеспечения условий работы аппаратуры, и с точки зрения удлинения связей между приборами. Просился еще один отсек, так и приняли. Эволюция кабины видна на рисунке 7.
На этом же рисунке видна и эволюция приборного отсека, объемы которого задавались с учетом опыта работы над другими объектами. Можно долго рассказывать о преимуществах и недостатках той или иной схемы, но специалистам безусловно ясно, что в первую очередь предпочтение отдавалось схеме, обеспечивающей меньшую массу, хотя учитывались и условия эксплуатации, и технология изготовления, и применяемость материалов, и сложность расчетной прочностной схемы, и многое другое. Выбор формы кабины (на схеме это вариант «д») был неразрывно связан с выбором общей компоновки корабля.
Наибольшее влияние на центровочные характеристики комплекса оказывает самый тяжелый элемент в общей схеме. Этим элементом в Лунном корабле являлся ракетный блок. Первоначально предложенный ракетчиками блок стали «утаптывать» по высоте — загонять двигатель блока внутрь баков (рис. 8). И в конечном итоге двигатель прорезал бак окислителя и превратил его в тор.
Теперь очередь дошла до ЛПУ. Мы понимали, что амортизационные ноги должны замкнуться в силовом отношении на собственный каркас. Размеры этого каркаса определило расстояние от среза сопла двигателя до силового шпангоута на баке окислителя. Это расстояние составляло всего 600 мм. Было много решений по каркасу, но осталось два варианта (рис. 9).
На этом фоне разгорелись бои между проектантами (вариант «а») и разработчиками рабочей документации, по которой уже работало производство. Каждый доказывал свой вариант. К этой казалось бы чисто технической стороне вопроса привлекались специалисты других ведомств. Объективности ради нужно сказать, что иллюстративные и расчетные материалы делались качественно с обеих сторон. Споры по каждому фитингу, панели, заклепке велись до хрипоты, до нервных срывов. В конечном итоге предпочтение было отдано варианту с нервюрами.
Схемы кабины с приборным отсеком, ракетного блока были выбраны, каркас ЛПУ определен, опоры приняты, осталось решить общие вопросы: как управлять Лунным кораблем, как стартовать, как обеспечить тепловой режим, энергетику, связь, выход на поверхность, размещение оборудования и т. д.
Нахождение основного ракетного двигателя в той же части, где располагался центр масс всего корабля, не позволяло использовать его как средство управления ЛК. Было просмотрено много вариантов, и остановились в конце концов на модульном варианте: и топливные баки, и средства подачи топлива к двигателям, и сами двигатели у правления установить на единой конструкционной раме. Безусловно, для повышения эффективности нужно было их отдалить от центра масс ЛК. Так и оказался блок управления на «голове» у космонавта — его установили на кабину корабля.
Совершенно не представляли себе, как обеспечить старт взлетной ступени. Сейчас многие видят по телевидению старты ракет и имеют представление о наземных сооружениях, обеспечивающих этот процесс. А здесь задача! На Луне, откуда надо взлетать, стартовых устройств нет, значит, все стартовые средства должны быть привезены с собой. Первое, что сразу пришло в голову, использовать для этой цели каркас Лунного посадочного устройства. Свою основную роль он уже выполнил, так пусть теперь послужит стартовым столом. Кстати, у американцев роль стартового стола выполняла посадочная ступень. Борьба за низкую центровку привела к увеличению поперечного размера ракетного блока, при этом его пришлось еще «утопить» в ЛПУ. Выход из туннеля всегда сложен, да еще там на Луне, когда не ясно, какую неожиданность преподнесет незнакомая поверхность. А вдруг под соплом окажется яма, и отраженная струя газов двигателя перевернет взлетный аппарат? Все гениальное просто. А.А.Саркисьян предложил избежать этого при помощи специального экрана сферической формы, центр которого находился в центре масс взлетного аппарата. Тогда любое воздействие газов даст результирующую силу, проходящую через центр масс. Это значит, что аппарат может смещаться вбок, но не опрокидываться. Но это было полдела. Им же был предложен и отражатель газовой струи. Он представлял собой две створки, которые подводились под сопла двигателей после посадки и обеспечивали упорядоченное движение газов. Кроме того, отражатель прижимал посадочную часть ЛК к поверхности Луны при старте взлетной ступени. Выигрыш, как видим, был двойной.
При проектировании корабля, понимая всю ответственность происходящего, каждый стремился, как мы говорили, «перезаложиться», т. е. сделать свой запас, обеспечивающий безопасность работы узла, детали, системы, агрегата.
Вспоминается случай с разработкой отражателя. Получив от газодинамиков нагрузку на отражатель, необходимую для проведения расчетов на прочность, мы обратили внимание, что если распределенное по площади отражателя давление (а так рассчитывалась нагрузка) умножить на площадь отражателя, то получаемая сила в полтора раза превзойдет тягу двигателей, которые своими выхлопными газами и создавали эту нагрузку. Вот так раз! Из ничего мы получили дополнительную силу! Пришли к газодинамикам. Они и слушать не хотели о наших рассуждениях, говорили о подсосах с противоположной стороны отражателя (это в вакууме-то!) и других неизвестных составляющих. Но наконец, устыдившись, они дали нагрузку, близкую к реальной.
Облик корабля рождался в муках. В любом вопросе нужна была творческая находка, изобретение, оригинальность решения.
К этому времени уже была отработана стыковка космических аппаратов на орбите Земли. Нам предстояло стыковаться на орбите Луны с орбитальным кораблем. Нужно было новое стыковочное устройство, потому что существующее, так называемое «штырь-конус», не вписывалось в схему из-за больших линейных размеров, да и масса его оставляла желать лучшего. При стыковке на орбите Луны ошибок могло быть больше, чем на орбите Земли. Все это привело к выводу, что для Лунной экспедиции нужна была своя стыковочная система. Дефицит масс накладывал на все свой отпечаток. И если у американцев «Аполлон» и Лунный модуль могли независимо друг от друга проводить активную стыковку, т.е. выполнять динамические операции по сближению и причаливанию, наша схема предполагала, что Лунный корабль будет «пассивным». Другими словами, ЛК будет только поддерживать положение своих осей в пространстве, а сближение и стыковку будет осуществлять Лунный орбитальный корабль. Поэтому стыковочный агрегат на ЛК сделали «пассивным» (рис. 10).
 Рис.10. Стыковочный узел |
Он представлял собой сотовую конструкцию с поперечными линейными размерами, превосходящими соответствующий агрегат стыковочного устройства «штырь-конус» в несколько раз. Это существенно облегчало стыковку кораблей, ведь каждая ячейка представляла собой миниатюрный «конус». Определили место установки стыковочного агрегата. Естественно, оно оказалось на блоке двигателей управления.
Проектирование любого космического аппарата не обходится без разработки вопросов обеспечения его температурных условий. Это относилось и к Лунному кораблю. Дело усугублялось тем, что, кроме тепловыделений аппаратуры, радиационного нагрева от Солнца, необходимо было учитывать и внешние температурные условия Луны. Известно, что на Луне в тени температура поверхности достигает -200° С, а на освещенной части доходит до +130° С. Это учитывалось при выборе места посадки — близ границы нахождения тени. Чуть позже мы подробно остановимся на системе терморегулирования, но на облике корабля не могло не отразиться наличие радиатора системы терморегулирования, который расположили по кольцу вдоль стыковочного узла. Его основная функция — сброс излишков тепла в космос за счет подбора соответствующих коэффициентов излучения окраски.
Существенное влияние на облик корабля оказали выбор и размещение элементов электропитания. Выбор их зависит от необходимой энергии и времени потребления. С учетом ограниченной (до двух суток) активной работы корабля, были выбраны химические источники тока, а попросту — аккумуляторные батареи. Их нужно было размещать как на взлетной, так и на посадочной части. Сделали специальный каркас. Повесили три батареи на каркас ЛПУ и две снаружи на приборный отсек. Наружное расположение позволяло устанавливать их в последний момент перед стартом, ведь разработчики гарантировали работоспособность аккумуляторов без подзарядки около трех месяцев.
Особое мучение при компоновке доставило размещение посадочного радиолокатора. Он ведь должен «смотреть» вниз, и размеры его были внушительными. Пришлось отойти от традиционных форм герметичного приборного отсека, установленного на ЛПУ. Он перестал быть круглым, но зато под ним и расположили локатор. Связь ЛК с орбитальным кораблем и Землей обеспечивали различные антенны: метрового, дециметрового диапазонов. Много хлопот было с остронаправленной параболической антенной. Ее нужно было уложить в транспортабельное положение, а после посадки — раскрыть. Установили специальные дециметровые антенны «морковки», а в качестве антенны метрового диапазона использовалась кольцевая щель между радиатором и стыковочным узлом.
И последнее, что характерно для облика ЛК, это кабель-мачта, по которой осуществлялась электрическая и гидравлическая связь взлетной и посадочной частей.
Компоновка всего головного блока (см. рис. 2) на носителе была такова, что Лунный корабль оказался под оболочками переходного отсека и головного обтекателя. Головной обтекатель сбрасывался в процессе выведения, после прохождения плотных слоев атмосферы Земли. Предстояло извлечь Лунный корабль из переходного отсека. Заглубление было значительным. Чтобы вызволить ЛК и не повредить наружные элементы потребовались специальные направляющие, охватывающие корабль снаружи (мы называли их «лыжами» за внешнее сходство). Так вот, эти «лыжи» крепились на опорных ногах посадочного устройства ЛК и опирались распорным амортизированным подкосом в конусные воронки, установленные в верхней части кабины. После выкатки корабля они отстреливались, а опорные ноги раскрывались в рабочее положение,
На фото 12 и 15 представлен во всей красе советский Лунный корабль. Его высота и максимальный размер между опорами посадочного устройства составили более 5 м (примерно 5200 мм), а начальная масса в конце разработки выросла до 5,5 тонн. На фото видны опорные ноги, уложенные в транспортное положение; остронаправленные антенны; навесное оборудование.
 Рис.12. ЛК в сборочном цехе (без теплоизоляции) | 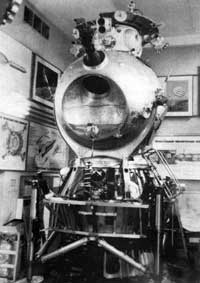 Рис.15. Советский Лунный корабль |
Перед полетом весь ЛК закрывался экранно-вакуумной теплоизоляцией, которая сглаживала его контуры и при этом обеспечивала надежную тепловую защиту всех систем корабля.
В этом разделе мы не рассказываем о принципах построения систем Лунного корабля. Таких систем на Лунном корабле было много:
система автономного управления;
система мягкой посадки;
система прилунения;
система обеспечения стыковки;
система электропитания;
система управления бортовым комплексом;
бортовая кабельная сеть;
бортовая цифровая вычислительная машина;
антенно-фидерные устройства;
система дальней радиосвязи;
система телевидения;
система измерений;
скафандр экипажа;
система обеспечения газового состава;
система терморегулирования;
система исполнительных органов;
научное оборудование;
средства обеспечения старта;
средства безопасности.
Автор этой книги не ставил задачу подробно описать принципы построения каждой системы, ее структуру и функционирование. Однако нельзя не сказать хотя бы несколько слов о системе управления.
Система управления — это мозг ракеты, космического объекта. Без системы управления немыслим аппарат. Можно ли представить себе автомобиль без рулевого управления или корабль без штурвала и рулевого? Нетрудно представить все последствия этого. Так и система управления Лунного корабля взяла на себя все функции по обеспечению заданного движения: посадка и прилунение, взлет и стыковка на орбите Луны с лунным орбитальным кораблем и т.д.
Разработку системы управления ЛК вел научно-исследовательский институт, руководимый академиком Н.А.Пилюгиным. Этот коллектив обладал большим опытом в разработке систем управления ракет, имел достаточный задел новых идей по системам управления космических объектов, которые и воплотил в систему управления ЛК. Институт был ведущим в создании системы, а за ним стояли еще десятки организаций, разрабатывающих отдельные элементы и блоки этой сложной системы.
Система автономного управления ЛК обеспечивает автоматическое управление его движением с возможностью ручного ввода установок для коррекции траектории на всех участках полета ЛК и управление горизонтальным маневром ЛК на заключительном участке посадки на поверхность Луны. Такая короткая, на первый взгляд, формулировка задач системы управления на самом деле предполагает огромную работу по аппаратурному и программно-математическому обеспечению.
Надо сказать, что впервые в отечественной космонавтике система управления космического объекта строилась на базе бортовой цифровой вычислительной машины (БЦВМ), в которой информация со всех чувствительных датчиков обрабатывалась по заданной логике, делалась оценка работоспособности всех систем и агрегатов ЛК и вырабатывались необходимые команды для их дальнейшего функционирования и полета.
В качестве чувствительных датчиков системы управления использовались гироскопические приборы (объединены в виде трехосной гиростабилизированной платформы) для пространственной ориентации, посадочный радиолокатор для измерения скорости и высоты полета ЛК, коллиматорное прицельное устройство и радиотехнические средства измерения. Для обеспечения высоких требований по надежности БЦВМ имела три независимых, параллельно работающих канала.
В систему управления входили полуавтоматическая система управления (ПСУ) горизонтальным маневром и угловой скоростью ЛК в процессе стыковки и ручная система управления (РСУ). РСУ позволяла пилоту самостоятельно выбирать место посадки на Луне. Для этого в его распоряжении было коллиматорное прицельное устройство и двухканатная ручка управления ориентацией и пропорциональным изменением горизонтальной скорости ЛК.
Пилот, совмещая по коллиматорному устройству метки прогнозируемой и выбираемой точек посадки выдавал информацию в систему управления для выработки команды на необходимый маневр. Проверка точности ориентации осей гиростабилизированной платформы осуществлялась солнечным и планетным датчиками.
Отработка этого сложнейшего электронного комплекса велась на созданных специальных стендах, вертолетном имитаторе посадки ЛК (на базе вертолета МИ-4) и других устройствах.
Даже по краткому рассказу о системе управления можно судить о труднейших проблемах, которые приходилось решать разработчикам системы управления ЛК. Думается, что еще не один автор, участник событий тех лет, напишет добрые слова в их адрес.
В последующих разделах постараемся с точки зрения общей компоновки ЛК рассказать коротко и о других системах, но повторяю, что каждая система Лунного корабля заслуживает своего достойного отражения в исторической литературе по космосу.