Проекты американских лунных автоматических КА 1961-1970 гг.
Карфидов В. «Космонавтика», 2021 г.
1.3. Программа «Ranger»
Программа Ranger была разработана как одна из подготовительных программ к проекту Apollo. Основной задачей программы было получение крупномасштабных снимков поверхности Луны для определения характеристик лунного грунта. Телеизображения должны были быть получены при подлете к Луне в режиме реального времени. Мягкая посадка АМС на Луну не предусматривалась, но в некоторых вариантах предполагалась доставка сбрасываемых контейнеров для работы на поверхности Луны.
Всего в рамках программы разрабатывалось 6 типов АМС.
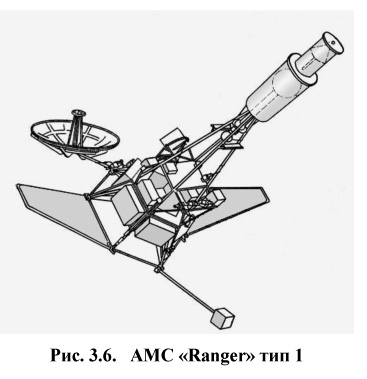
1.3.1. «Ranger» тип 1
АМС «Ranger» тип 1 предназначались для летных испытаний оборудования и методов управления на высокоэллиптической околоземной орбите. Запуск АМС этого типа к Луне не планировался.
На АМС устанавливалась следующая аппаратура:
- магнитометр;
- электростатический анализатор энергии частиц солнечной плазмы;
- детекторы частиц средней энергии;
- ионизационная камера;
- детектор микрометеоритных частиц;
- сцинтилляционные счетчики рентгеновского излучения Солнца;
- сканирующий телескоп для изучения Земли и экзосферы в ультрафиолетовых лучах;
- прибор для экспериментального измерения сил трения между различными материалами в вакууме.
Для ориентации АМС использовались 10 реактивных сопел, в которые подавался сжатый азот. Система энергопитания включала серебряно-цинковые аккумуляторы и две солнечные батареи площадью по 1,85 м
2. Расчетная длительность работы АМС на орбите ИСЗ - 2-3 месяца.
Масса АМС «Ranger» тип 1 - 306 кг, в том числе научной аппаратуры - 65 кг.
Запуск АМС осуществлялся РН Atlas-Agena B. Рассчитывалось выводить АМС на околоземную орбиту высотой 60 000 х 1 100 000 км.
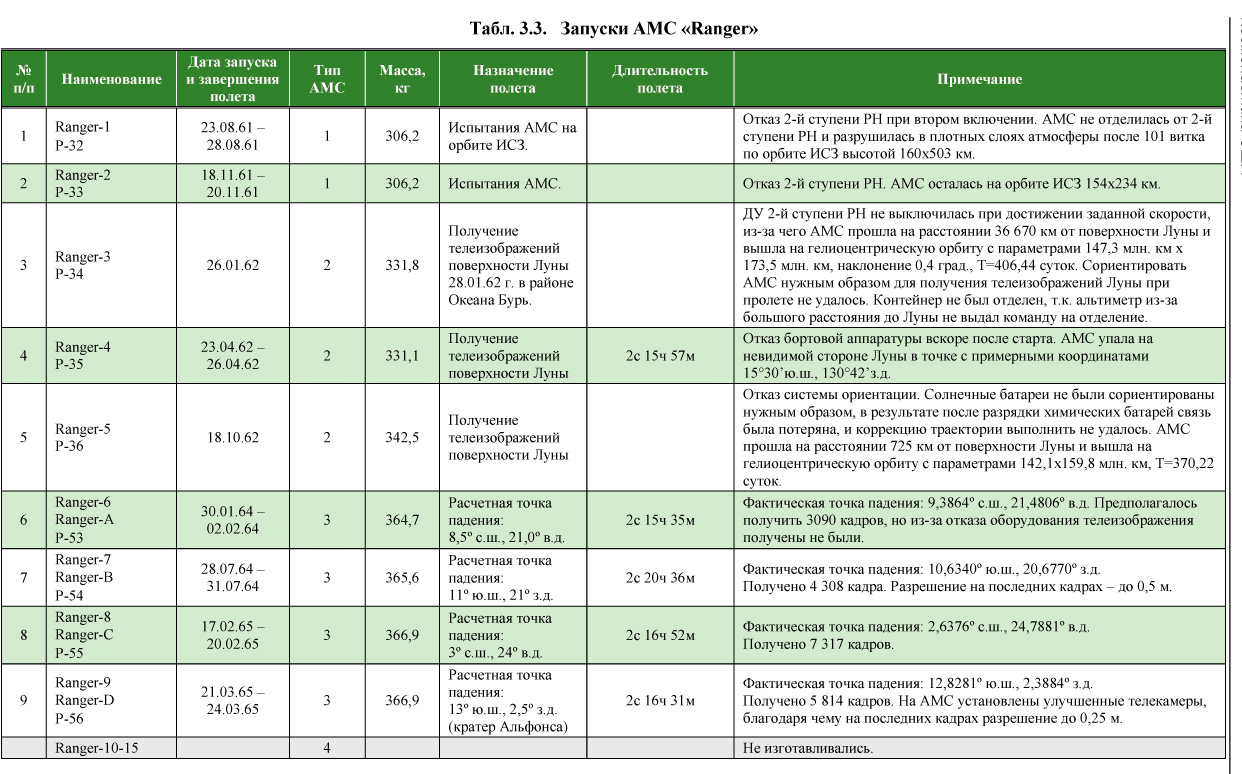
Было изготовлено и запущено две АМС «Ranger» тип 1 («Ranger-1» и «Ranger-2»), обе неудачно. Информация о запусках приведена в табл. 3.3.
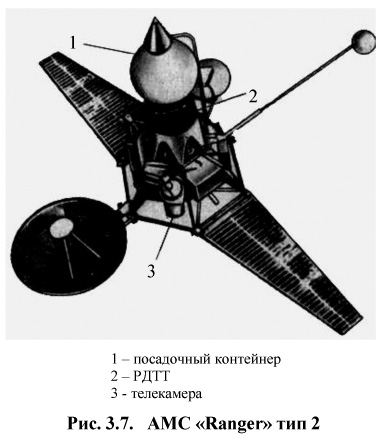
1.3.2. «Ranger» тип 2
АМС этого типа рассчитывались на прямое попадание в Луну, при этом кроме получения телеизображений при подлете к Луне АМС должна была доставить на поверхность Луны контейнер с несколькими приборами и радипередатчиком.
На основном блоке АМС устанавливалось следующее оборудование:
- радиолокационный альтиметр;
- телекамера, передающая изображения размером 200 строк по 200 элементов;
- гамма-спектрометр для определения концентрации радиоактивных веществ в лунных породах.
Планировалось получить до 100 телеизображений поверхности Луны с высот в диапазоне от 3 840 до 24 км.
Система ориентации использовалась такая же, как на АМС «Ranger» тип 1. Кроме этого, на АМС «Ranger» тип 2 устанавливалась корректирующая ДУ, работающая на продуктах разложения гидразина. Тяга КДУ - 22,7 кгс, запас топлива обеспечивал приращение характеристической скорости 44 м/с.
Система энергопитания состояла из серебряно-цинковых аккумуляторов и двух солнечных батарей площадью по 2,72 м
2.
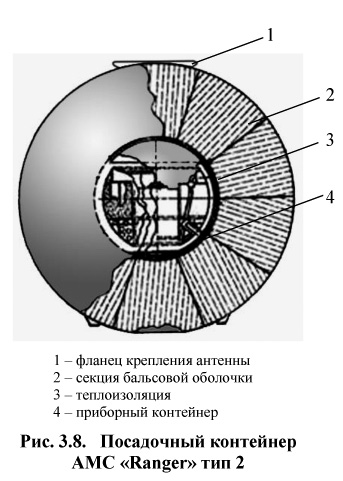
Посадочный контейнер, разработанный фирмой Aeronutronic (отделение фирмы Ford Motor) был снабжен тормозным РДТТ тягой 2,3 тс, который обеспечивал изменение скорости контейнера на 2,8 км/с. Приборный контейнер диаметром 30,5 см был заключен в оболочку из бальсового дерева диаметром 63,5 см, которая должна была амортизировать удар о поверхность Луны. Пространство между контейнером и бальсовой оболочкой заполнялось маслом. После посадки масло сливалось через выбиваемые заглушки. Внутри контейнера были установлены сейсмометр, температурные датчики, радиопередатчик и серебряно-кадмиевые батареи.
Масса АМС около 330 кг, в т.ч. тормозной РДТТ - 150 кг и посадочный контейнер - 46,5 кг.
Запуск АМС производился РН Atlas-Agena B.
Схема полета выглядела следующим образом:
АМС выводится на траекторию полета к Луне с промежуточной орбиты ИСЗ высотой 185 км. При подлете к Луне АМС ориентируется объективом телекамеры в направлении полета и начинает вести передачу телеизображений поверхности Луны с частотой 1 кадр каждые 13 секунд. Передача одного кадра длится 10 секунд. На высоте 24 км передача изображений прекращается и выполняется закрутка АМС вокруг продольной оси для обеспечения стабилизации контейнера и РДТТ, после чего контейнер с РДТТ отделяется от АМС. На высоте 21 км при скорости около 2,8 км/с РДТТ включается, обеспечивая торможение контейнера до 0 км/с, затем на высоте около 300 м отработавший РДТТ отбрасывается, а контейнер падает на поверхность Луны со скоростью соударения около 70 м/с.
Расчетная длительность работы контейнера на поверхности Луны - 30-50 суток.
Всего было изготовлено и запущено к Луне три АМС «Ranger» тип 2 («Ranger-3» - «Ranger-5»), все три - неудачно.
Информация по запускам АМС приведена в табл. 3.3
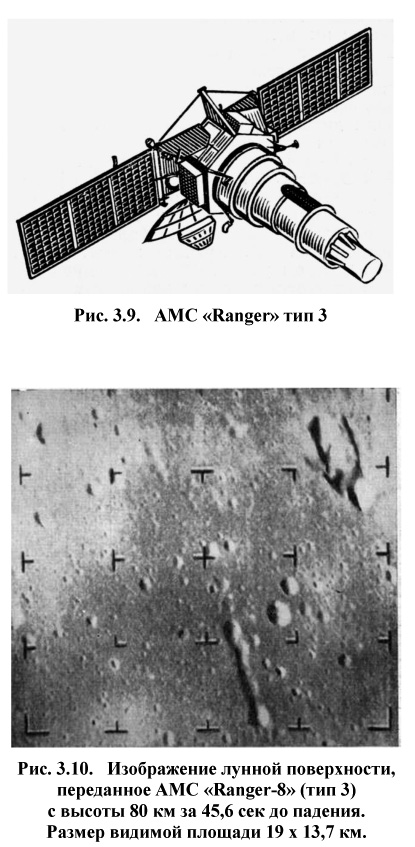
1.3.3. «Ranger» тип 3
Назначение АМС «Ranger» тип 3 - получение телеизображений поверхности Луны для выбора мест посадки КК «Apollo».
АМС «Ranger» тип 3 практически не отличается от АМС «Ranger» тип 2, за исключением того, что вместо посадочного контейнера устанавливался блок телекамер. В состав блока входили:
- 2 телекамеры с углами зрения 25° и 8,4°;
- 2 телекамеры с углами зрения 6,3°;
- 2 телекамеры с углами зрения 2,1°.
Кадр содержит 800 строк (750 строк на дюйм). Разрешающая способность при минимальном расстоянии съемки от 50 м (при угле зрения 25 ) до 0,5 м (при угле зрения 2,1 ). Расчетное количество телекадров - 4000.
АМС «Ranger-9» имела усовершенствованные телекамеры с разрешающей способностью 1 500 строк на дюйм (до 25 м на местности).
Съемка производилась в интервале высот от 1 700 км до 100 м.
Масса АМС около 365 кг, в т.ч. 40 кг - телекамеры и 132 кг - связанное с телекамерами оборудование. Размеры АМС в сложенном состоянии: длина - 2,51 м, максимальный поперечный размер - 1,52 м. Размеры в развернутом состоянии: длина - 3,12 м, размах солнечных батарей - 5,18 м.
Запуск АМС производился РН Atlas-Agena B.
Всего было изготовлено и запущено 4 АМС «Ranger» тип 3: «Ranger-6» - «Ranger-9». Впервые были получены крупномасштабные изображения поверхности Луны.
Информация о полетах АМС приведена в табл. 3.3.
Рассматривались предложения о продолжении запусков АМС этого типа, так же как и о необходимости изготовления усовершенствованных АМС «Ranger». В проекте бюджета NASA на 1964 год предусматривалось выделение средств на изготовление и запуск 10 АМС «Ranger», после запуска АМС «Ranger-9». Однако при утверждении бюджета эта статья подверглась столь значительному сокращению, что от разработки усовершенствованных АМС типов 4 и 5 пришлось отказаться, как и от изготовления дополнительных АМС «Ranger» типа 3.
1.3.4. «Ranger» ТИП 4
АМС для доставки на Луну посадочного контейнера с телекамерой. После «жесткой» посадки контейнера из него должна была на стержне выдвигаться камера, медленно поворачивающаяся по азимуту с одновременным сканированием поверхности Луны в вертикальной плоскости с помощью качающейся призмы. Угол сканирования от -30° до +5°. За 8 часов камера должна была отснять полную панораму места прилунения с высоты 75-80 см. Получаемые изображения должны были иметь разрешение по вертикали 3 600 строк.
Разработку и изготовление посадочных контейнеров должна была выполнить фирма Aeronutronic.
Предлагалось изготовить и запустить 6 АМС «Ranger» тип 4: «Ranger-10» - «Ranger-15», однако в связи с бюджетными ограничениями это предложение было отклонено.
1.3.5. «Ranger» тип 5
АМС «Ranger» тип 5 - перспективное продолжение программы «Ranger», которое было предложено в 1964-65 годах в связи с задержками в разработке АМС «Surveyоr» (АМС для мягкой посадки на Луну). Предлагалось аналогично АМС «Ranger» типов 2 и 4 устанавливать сбрасываемые контейнеры «жесткой посадки» с аппаратурой. В отличие от типа 2 посадочные контейнеры АМС «Ranger» типа 5 должны были нести сбрасываемые на грунт пенетрометры для определения прочности лунного грунта. АМС этого типа не изготавливались.
1.3.6. «Ranger» тип 6
Проект АМС для получения телеизображений с орбиты ИСЛ. АМС аналогична АМС «Ranger» тип 3, но, в отличие от прототипа, на АМС тип 6 должен был также устанавливаться РДТТ, применявшийся ранее на АМС «Ranger» тип 2. С помощью РДТТ АМС планировалось выводить на окололунную орбиту.
Проект был отклонен, так как было признано более целесообразным для орбитальной съемки поверхности Луны применять специализированные АМС.
 1.4. Проект «Prospeсtor» (1961 г.)
1.4. Проект «Prospeсtor» (1961 г.)
Проект АМС «Prospector», предложенный JPL, рассматривался NASA в 1961 году.
«Prospector» - АМС массой 1,8-2,7 т для осуществления мягкой посадку на поверхность Луны. Предполагалось, что АМС сможет доставлять на Луну полезный груз массой до 1,1 т с отклонением не более 1 км от расчетной точки в любом районе видимой стороны Луны. С помощью АМС «Prospector» предполагалось выполнять следующие работы:
- проведение анализа лунных пород;
- отбор образцов лунных пород и грунта;
- доставка отобранных образцов на Землю.
Так, самоходный аппарат, доставляемый на Луну с помощью АМС «Prospector», должен был иметь возможность передвижения в радиусе нескольких сот метров. Расчетное время работы АМС - 6 месяцев.
Проект «Prospector» не был принят, т.к. он являлся угрозой для программы пилотируемых полетов «Аполлон», как более дешевый и безопасный проект. В результате NASA отдала предпочтение более простым и узкоцелевым АМС «Surveyor».
1.5. Программа «Surveyor»
В задачи программы «Surveyor» входило получение данных о лунном грунте, в первую очередь телеизображений, с поверхности Луны (АМС «Surveyor-A») и с окололунной орбиты (АМС «Surveyor-B») для подготовки пилотируемой экспедиции по программе «Apollo».
В ходе работ первая часть программы - «Surveyor A», - стала называться просто «Surveyor», а вторая часть программы - «Surveyor B», - трансформировалась в программу «Lunar Orbiter».
Разработку АМС «Surveyor» по контракту NASA выполняла фирма Hughes Aircraft под руководством JPL (Jet Propulsion Laboratory - подразделение NASA).
Вскоре после начала разработки АМС «Surveyor» выявились проблемы, связанные с ограничениями возможностей РН Atlas-Centaur по отправке к Луне полезного груза. Было решено на начальном этапе запускать экспериментальные АМС «Surveyor» тип I, предназначенные только для решения задачи отработки мягкой посадки. Отработанные АМС «Surveyor» тип II должны были использоваться на втором этапе программы. В дальнейшем выяснилось, что проектная масса АМС тип II все-таки превышает возможности РН, в связи с чем был рассмотрен проект АМС «Surveyor» тип II облегченный. Таким образом, было спроектировано три модификации АМС «Surveyor»:
- тип I, экспериментальный (A-21)
1;
- тип II, отработанный (A-25);
- тип II, облегченный (A-21A, переименованный позднее в A-24).
Кроме перечисленных вариантов, существовали еще другие проекты и предложения по модификациям АМС «Surveyor».
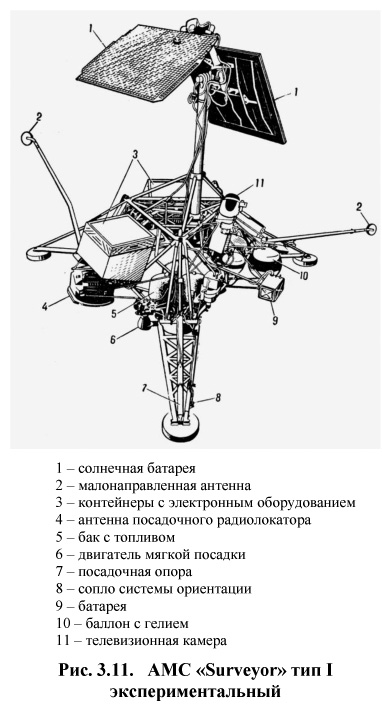
1.5.1. Surveyor» тип I (Экспериментальный)
Экспериментальные АМС «Surveyor» тип I (проект A-21) разрабатывались и создавались для решения следующих задач:
- отработка бортовых систем;
- отработка мягкой посадки на Луну.
Экспериментальные АМС «Surveyor» выполнялись в облегченной конфигурации, с минимальным количеством научных приборов, и предназначались исключительно для отработки систем для мягкой посадки на Луну. Создание АМС облегченного типа было связано с тем, что характеристики РН Atlas-Centaur, которая должна была осуществлять запуски АМС «Surveyor», еще не были доведены до нужных величин.
АМС имела трехопорное шасси, тормозной РДТТ с тягой 4,09 тс и три верньерных ЖРД (по одному на каждой опоре) с регулируемой тягой от 13,6 кгс до 47,2 кгс.
Состав оборудования:
- сейсмограф;
- магнитометр;
- приборы для измерения параметров гравитационного поля, радиации и лунной атмосферы.
- 2 телекамеры с углом зрения по вертикали от -10 до +45 , по горизонтали от 0 до 360 ;
- «подлетная» телекамера для получения изображений Луны во время приближения к Луне и в процессе посадки (устанавливалась только на АМС «Surveyor-1 и 2»).
1 В скобках приведены внутренние обозначения фирмы Hughes Aircraft.
Подлетная телекамера включалась на высоте 1 600 км и передавала изображения с частотой 1 кадр в 3 сек. Телекамеры горизонтального обзора устанавливались на высоте 1,8 м от поверхности (высота глаз космонавта) и передавали изображения с разрешением по вертикали 400 строк. Разрешающая способность соответствовала 5 мм при съемке участка поверхности, находящегося на расстоянии 1 м от центра АМС.
Источниками энергопитания являлись серебряно-цинковые аккумуляторы и солнечная батарея площадью 0,8 м
2.
Схема полета АМС выглядела следующим образом:
- вторая ступень РН с промежуточной орбиты высотой 160 км выводит АМС на траекторию полета к Луне;
- на трассе «Земля-Луна» с помощью верньерных ЖРД выполняется коррекция траектории;
- на высоте 84 км при скорости 2,62 км/с включаются верньерные ЖРД и РДТТ (если топливо верньерных ЖРД было истрачено на проведение коррекций, то посадка не выполняется, а производится съемка «подлетной» камерой во время падения);
- на высоте около 10 км РДТТ прекращает работать, и вскоре отбрасывается, а ЖРД продолжают работать. Скорость в это время составляет 12-15 м/с;
- с помощью верньерных ЖРД АМС снижается до высоты 4 м, погасив при этом скорость до 1,5 м/с, после чего ЖРД выключаются;
- АМС совершает посадку со скоростью до 5 м/с.
Перегрузки при ударе о поверхность не должны превышать 20g.
Места посадок выбирались так, что считалась допустимой посадка в пределах круга радиусом 30 км от расчетной точки.
Ориентация АМС обеспечивалась с помощью реактивных сопел, работающих на сжатом азоте.
Масса АМС при старте с Земли около 1000 кг, при посадке на Луну - около 280 кг, в т.ч. 29 кг научной аппаратуры. Запуск АМС «Surveyor» производился РН Atlas-Centaur.
Расчетное время работы АМС на Луне - от 30 до 90 суток.
Первоначальной программой 1961 года предусматривалось изготовление семи АМС «Surveyor» (а также один запасной экземпляр). Когда создание АМС разделилось на экспериментальные (тип I) и отработанные (тип II), общее количество разделилось на 4 АМС - тип I и 3 АМС - тип II.
Впоследствии, когда создание АМС «Surveyor» тип II было отменено, количество экспериментальных АМС «Surveyor» тип I вновь увеличилось до семи, и на них стали устанавливать дополнительные научные приборы, снимая при этом часть оборудования, которое требовалось только на начальном этапе отработки. Это позволило решить с помощью экспериментальных АМС «Surveyor» задачу, которая первоначально возлагалась на АМС «Surveyor» тип II, а именно, изучение лунного грунта в местах, выбранных для посадок пилотируемых экспедиций.
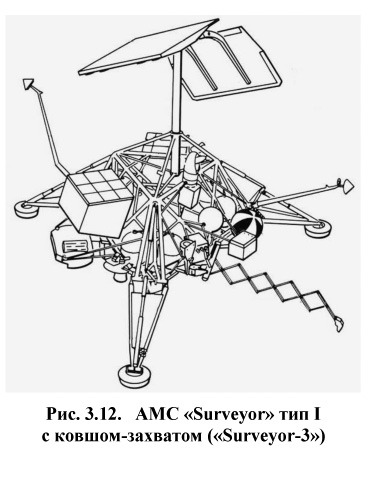
Так, на АМС «Surveyor-3-7» устанавливались:
- ковш-захват для определения механических характеристик грунта (только на АМС «Surveyor-3, 4, 7» - вместо «подлетной» телекамеры). Объем ковша 16,6 см
3, длина рычага с ковшом - 1,62 м. Ковшом может быть вырыта канавка глубиной до 45 см в секторе поверхности, площадь которого равна 2,2 м
2;
- магнитный стержень на ковше для выявления в грунте частичек железа (на АМС «Surveyor-4 и 7»);
- альфа-анализатор для определения состава грунта (только на АМС «Surveyor-5, 6» - вместо ковша-захвата, а также на АМС «Surveyor-7» - дополнительно к ковшу-захвату).
Всего было изготовлено 7 экспериментальных АМС «Surveyor» тип I.
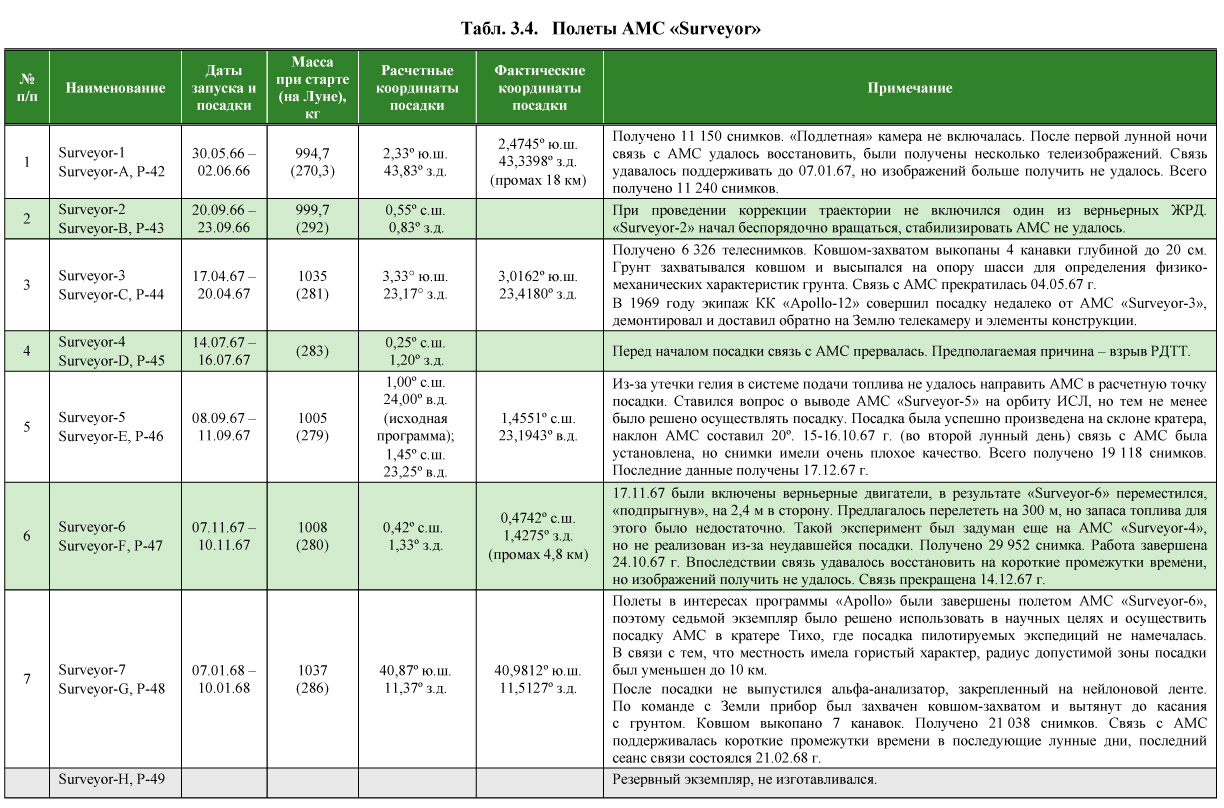
Информация по запускам АМС «Surveyor» приведена в табл. 3.4.
1.5.2. Surveyor» тип II (облегчённый)
В связи с тем, что отработка РН Atlas-Centaur и доведение ее характеристик до нужной грузоподъемности затягивались, в конце 1965 года было принято решение о создании промежуточного варианта АМС «Surveyor» - тип II облегченный, проект А-21А (переименован в 1965 г. в A-24). АМС этого типа должны были нести следующее оборудование:
2 телекамеры горизонтального обзора;
1 телекамера, направленная вертикально вниз;
блок приборов для исследования динамики посадки АМС;
устройство для изучения механических свойств грунта;
акустический детектор метеорных частиц и частиц грунта, выбиваемых метеоритами;
альфа-анализатор проб лунного грунта;
сейсмометр.
Масса АМС при старте должна была составлять 1 020 кг, в т.ч. масса научных приборов - 52 кг. По состоянию на апрель 1963 г. планировалось изготовить и запустить 3 облегченных АМС «Surveyor» тип II, при этом количество экспериментальных АМС «Surveyor» тип I было сокращено до 4, а количество отработанных АМС «Surveyor» тип II - до 3. В начале 1966 года из-за сокращения бюджета был сокращен планируемый объем научных исследований, проводимых по программе «Surveyor», в связи с чем на облегченных АМС «Surveyor» тип II решено было устанавливать только одну телекамеру вместо трех, а из научного оборудования - только блок измерения динамики посадки. Таким образом, необходимость в облегченных АМС «Surveyor» тип II отпала, т.к. телекамера и блок измерения динамики могли быть установлены и на экспериментальных АМС «Surveyor» тип I. Из программы разработки АМС тип II были вычеркнуты, а количество АМС «Surveyor» тип I снова увеличилось до 7 штук.
1.5.3. Surveyor» тип II (отработанный)
Изготовление АМС этого типа планировалось выполнять после завершения отработки бортовых систем с помощью экспериментальных АМС «Surveyor» тип I. Основным назначением этого варианта АМС должно было стать изучение лунного грунта непосредственно в местах, выбранных для посадок пилотируемых экспедиций и проведение научных исследований.
Основным отличием отработанных АМС «Surveyor» тип I от экспериментальных должно было заключаться в более широком наборе научной аппаратуры для изучения лунного грунта.
Так, планировалось устанавливать следующее оборудование:
- 2 телекамеры горизонтального обзора с углами зрения 25,4° и 6,4°;
- телекамера, направленная вертикально вниз;
- буровой механизм для взятия образцов грунта с глубины 0,5-1,5 м;
- сейсмограф;
- магнитометр;
- альфа-анализатор.
Стартовая масса АМС должна была составлять около 1 140 кг, масса после прилунения - 340 кг, в т.ч. 113 кг - масса научных приборов. Высота АМС 3,05 м, диаметр описанной окружности по опорам шасси - 4,26 м.
Первоначально планировалось изготовить 10 отработанных АМС «Surveyor» тип II. В процессе работ по разработке АМС и РН это количество было сокращено до 3-х, а в конце 1966 года NASA приняла решение об отказе от изготовления отработанных АМС «Surveyor» тип II вообще. Причинами такого решения являлись:
- задержки в разработке оборудования;
- необходимость экономии средств;
- уверенность в том, что необходимая информация по свойствам лунного грунта будет получена с помощью экспериментальных АМС «Surveyor».
1.5.4. «Surveyor» тип 2 для доставки лунохода
На начальном этапе работ по программе «Surveyor», когда задачи программы еще не были утверждены, изучалась возможность комплектации АМС «Surveyor» тип II небольшим самоходным устройством «Surveyor LRV» (Surveyor Lunar Roving Vehicle). Масса АМС «Surveyor» с мини-луноходом при старте должна была составить 1 130-1 270 кг, что диктовалось проектными возможностями РН Atlas-Centaur.
Всего предполагалось изготовить и запустить 10 АМС «Surveyor» тип II, причем два из них должны были осуществить посадку недалеко друг от друга для проведения взаимного осмотра посредством самоходных АМС «Surveyor LRV».
В 1965 году проект АМС «Surveyor» тип II был пересмотрен, задача доставки на Луну мини-лунохода «Surveyor LRV» была отменена.
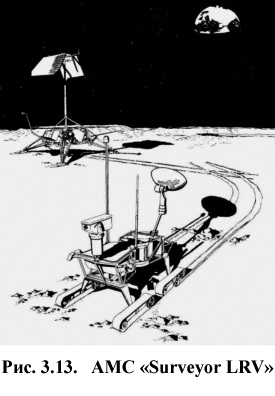 1.5.4.1. «Surveyor LRV» - Луноход по-американски
1.5.4.1. «Surveyor LRV» - Луноход по-американски
Самоходная АМС «Surveyor LRV» должна была доставляться на Луну с помощью АМС «Surveyor» тип II. Основная задача «Surveyor LRV» - поиск подходящих посадочных площадок для высадки пилотируемых экспедиций по программе «Apollo».
«Surveyor LRV» представлял собой мини-луноход массой 41,7 кг. 8 колес лунохода объединялись попарно четырьмя гусеницами, одно колесо в гусенице является ведущим, второе ведомым. Ширина гусеницы 7,6 см, диаметр колес 12,7 см, расстояние между осями колес в одной гусенице 45,7 см, ширина колеи 75,2 см.
Максимальная скорость передвижения 0,3 км/ч. Рассчитывалось, что «Surveyor LRV» сможет удаляться от доставившей его АМС на расстояние от 3 до 5 км.
«Surveyor LRV» оснащался телекамерой, которая имела возможность поворачиваться на 200° в любую сторону по горизонтали и на +15° --45° по вертикали, а также пенетрометром и солнечными датчиками. Луноход должен был иметь направленную антенну для прямой связи с наземным командным пунктом.
«Surveyor LRV» должен был иметь радиоизотопный источник тока, мощностью 38,8 Вт. Управление должно было происходить по командам с Земли. В течение лунной ночи «Surveyor LRV» должен был находиться в автономном режиме. Расчетное время работы - 105 суток.
Проект отменен в 1965 году.
1.5.5. «Surveyor» - грунтовоз
В 1961 году, когда формировалась программа «Surveyor», рассматривалось предложение использовать АМС типа «Surveyor» для ускорения работ по программе «Apollo» путем переноса части задач на автоматические станции. В частности, в соответствии с предложением, модифицированная АМС «Surveyor» должна была доставить на Луну самоходное устройство и возвратную ракету. Самоходный аппарат должен был произвести сбор образцов лунных пород, доставить их к АМС и перегрузить во взлетную ракету, которая доставила бы собранные образцы на Землю.
Задача такой сложности не была включена в реальные планы и не осуществлялась.
1.5.6. «Surveyor» - лунный маяк
В 1965 году было внесено предложение доставлять с помощью АМС «Surveyor» тип II радиомаяки в места предстоящих посадок пилотируемых экспедиций. Кроме маяка должен был доставляться источник света и средства для окрашивания грунта вокруг АМС. Все эти меры должны были облегчить пилотам КК «Apollo» навигацию и посадку в выбранное место. Предложение не осуществлялось.
1.5.7. АМС «Surveyor», запускаемая с КК «Apollo»
В 1964 году NASA рассматривала вопрос использования АМС «Surveyor» для прямого изучения выбранных мест высадки экспедиции «Apollo». АМС «Surveyor» при этом должны были запускаться непосредственно с окололунной орбиты экипажем КК «Apollo».
1.5.8. «Surveyor B»
АМС «Surveyor B» («Surveyor Orbiter») была задумана, как искусственный спутник Луны для картографирования поверхности Луны с целью выбора мест для посадок пилотируемых экспедиций по программе «Apollo». Фирма Hughes проектировала два типа АМС «Surveyor B»: легкая АМС тип I и тяжелая АМС тип II.
АМС «Surveyor B» тип I предназначалась для вывода на окололунную орбиту высотой 100-200 км и наклонением 10-40 град. Масса АМС около 363 кг, в т.ч. масса полезного груза 18-27 кг.
АМС «Surveyor B» тип II должна была представлять собой модификацию АМС «Surveyor А». Основными отличиями должны были быть:
- отсутствие посадочного шасси;
- замена телекамер на сдвоенное фототелевизионное устройство (съемка производится на фотопленку с последующей проявкой на борту и сканированием фотоснимков для передачи на Землю). Предполагалось выполнить картирование поверхности Луны с разрешением 1 км, выборочную съемку участков поверхности с разрешением 100 м, а также съемку выбранных объектов с разрешением до 10 м, в том числе получение стереопар;
- вместо научных приборов для изучения свойств лунного грунта устанавливаются приборы для изучения окололунного пространства.
Масса АМС «Surveyor B» тип II - 816-907 кг, РН - Atlas-Centaur. Намечалось начать запуски АМС «Surveyor B» в 1964 году. Всего планировалось изготовить и запустить до 1967 года шесть АМС этого типа.
Работы по АМС «Surveyor B» велись с 1961 года, а в 1963 году в связи с задержкой в отработке РН Atlas-Centaur, а также в связи с уточненными требованиями NASA к качеству съемки выбранных участков программа создания, АМС «Surveyor B» была заменена проектом легкой АМС фирмы Boeing, запускаемой с помощью РН Atlas-Agena D. На новой АМС планировалось использовать более высококачественную фотоаппаратуру. Новый проект получил название LOPP (Lunar Orbiter Photographiering Probe), переименованный вскоре в просто «Lunar Orbiter».
1.5.9. Запасные проекты
В 1965 году NASA рассматривала несколько «запасных» проектов получения информации о лунном грунте на случай непредвиденных задержек в осуществлении программы «Surveyor». Эти проекты не осуществлялись.
1.5.9.1. Лунные пенетраторы
Этот проект предусматривал использование ударных зондов (пенетраторов) для получения информации о прочности лунного грунта. Зонды предполагалось разместить на последней ступени РН Titan-3C, которая должна была направляться непосредственно на поверхность Луны. Радиопередатчики и акселерометры зондов должны были рассчитываться на воздействие перегрузок до 7 500 - 20 000 g. Незадолго до падения ступени на Луну зонды должны были отделяться, получая дополнительный импульс разгона, и падать на поверхность Луны, обгоняя при этом ступень. В момент удара и проникновения в поверхность Луны акселерометры зонда должны были измерять и передавать в реальном времени данные о перегрузках, которые должны были транслироваться на Землю радиоаппаратурой, установленной на последней ступени РН.
1.5.9.2. «Лунная вспышка»
Проект ELF («Early Lunar Flare» - «Ранняя лунная вспышка») предусматривал доставку на Луну контейнеров с трехфтористым хлором. Доставка должна была осуществляться по прямой траектории, аналогично доставке лунных пенетраторов. Установка какой-либо аппаратуры на контейнерах не предусматривалось. При ударе о лунную поверхность контейнеры должны были взрываться, давая яркую вспышку. Наблюдение и изучение спектра вспышек должно было дать информацию о составе и структуре поверхностного слоя Луны.
 1.6. Программа «Lunar Orbiter»
1.6. Программа «Lunar Orbiter»
1.6.1. «Lunar Orbiter»
Проект АМС «Lunar Orbiter» (начальное название - «Lunar Orbiter Photographiering Probe», LOPP) появился в 1963 году, как облегченный вариант АМС «Surveyor B». После конкурса, в котором участвовало 5 фирм, были выбраны две фирмы: Boeing и Hughes Aircraft. Окончательный контракт на разработку АМС «Lunar Orbiter» получила фирма Boeing.
Задачами программы «Lunar Orbiter» были:
- картографирование участков лунной поверхности, намеченной для посадки КК LEM по программе «Apollo»;
- изучение окололунного пространства.
Позднее (в 1967 году) была поставлена задача выполнить полное картографирование поверхности Луны.
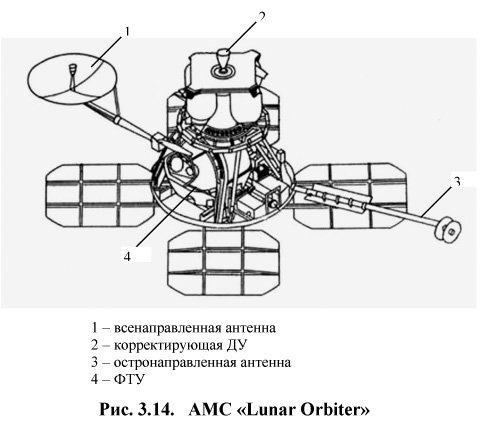
Состав оборудования АМС «Lunar Orbiter»:
- два фототелевизионых устройства (ФТУ) с запасом пленки по 195 кадров для каждой фотокамеры и c объективами с разными фокусными расстояниями;
- детекторы микрометеоритных частиц;
- дозиметры для определения дозы радиации, получаемой фотопленкой.
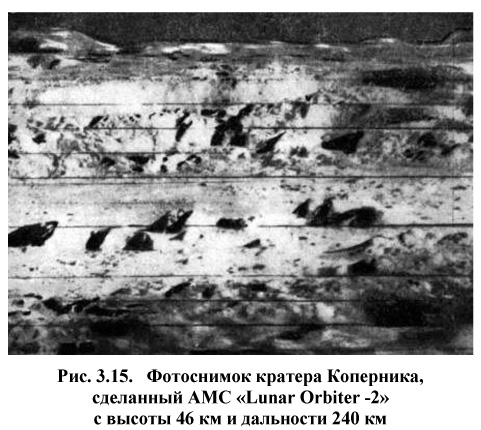
Сканирование фотоизображений выполнялось в режиме 1 000 х 1 000 элементов (широкоугольная камера) и 1 000 х 3 000 элементов (узкоугольная камера). ФТУ обеспечивали разрешающую способность снимков, сделанных с высоты 46 км, - 8 м и 1 м, соответственно. Расчетное время работы ФТУ - 1 месяц, другого оборудования - 1 год.
Работа аппаратуры АМС обеспечивалась никель-кадмиевыми аккумуляторами и четырьмя солнечными батареями общей площадью 4,5 м
2.
АМС была снабжена корректирующе-тормозной двигательной установкой (КТДУ) многократного запуска. Тяга КТДУ - 45,4 кгс. Запас приращения характеристической скорости, обеспечиваемый КТДУ, равен 1 097 м/с. Для ориентации АМС использовались 8 реактивных сопел, работающих на сжатом азоте.
В сложенном состоянии высота АМС - 1,68 м, поперечный размер - 1,52 м. В развернутом состоянии (на орбите Луны) поперечный размер АМС по панелям солнечных батарей составляет 3,96 м, по антеннам -5,61 м.
Масса АМС около 390 кг, в т.ч. масса ФТУ - 68 кг. РН - Atlas-Agena D.
Схема полета АМС выглядит следующим образом. АМС выводится на селеноцентрическую орбиту высотой 200 х 1 850 км. С этой орбиты производится пробная фотосъемка для проверки исправности ФТУ (для пробных снимков используется дополнительный запас пленки, не входящий в расчетные 195 шт.). Через несколько суток АМС переводится на рабочую орбиту 40 х 1 850 км, с которой в течение месяца проводится картографирование. После исчерпания ресурса ФТУ АМС «Lunar Orbiter» используется для изучения радиационной и метеоритной обстановки в окрестностях Луны. После завершения работы по команде с Земли КТДУ включается для выдачи тормозного импульса, и АМС сходит с орбиты, падая на поверхность Луны в заданном районе.
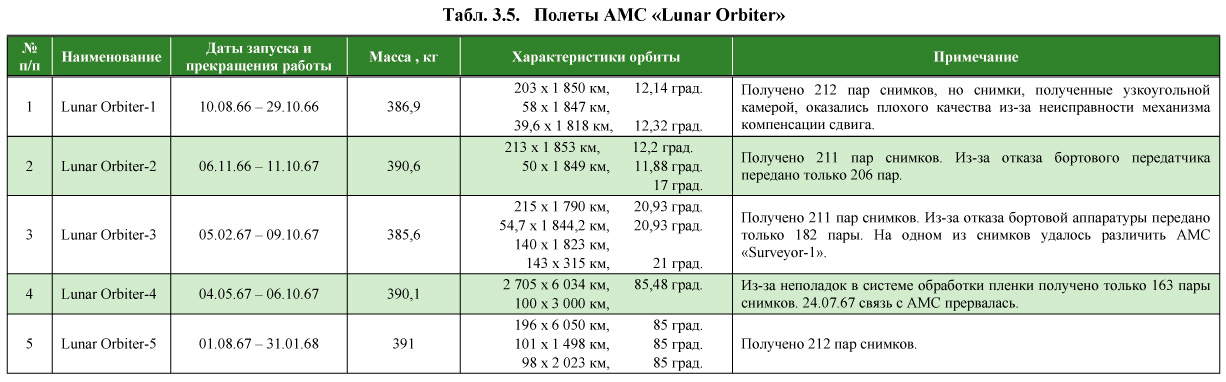
Первоначально планировалось изготовление 10 летных образцов АМС «Lunar Orbiter», но позднее это количество было сокращено до 5 шт. После успешного полета четырех АМС фирма Boeing предложила NASA собрать шестой экземпляр АМС из оставшихся запасных частей, однако, это предложение было отклонено. Информация о выполненных запусках АМС «Lunar Orbiter» приведена в табл. 3.5.
Всего АМС «Lunar Orbiter-1, 2 и 3» засняли около 30% поверхности Луны, в том числе:
0,25% - потенциальные места посадки экспедиций Apollo;
4% - различные районы видимой стороны Луны, вблизи от потенциальных мест посадки;
25% - различные районы обратной стороны Луны.
Так как задача фотосъемки выбранных участков поверхности в интересах программы «Apollo» была выполнена первыми тремя АМС «Lunar Orbiter», для последних двух была определена задача полного картографирования Луны. Разрешение фотографий должно было составить до 60 м для видимой стороны и 120 м - для обратной стороны Луны.
АМС «Lunar Orbiter» сфотографировали 99,5% обратной стороны Луны с разрешением 150-200 м, а также всю видимую сторону с разрешением лучше 150 м на 99% поверхности и лучше 90 м - на остальной площади. Отдельные области сфотографированы с разрешением до 1 м.
1.6.2. «Lunar Orbiter» модифицированный
В 1965 году фирма Boeing по контракту NASA изучала возможность модификации АМС «Lunar Orbiter» для исследования лунного грунта с орбиты ИСЛ. Предполагалось, что с помощью доработанных АМС «Lunar Orbiter» может выполняться сброс различных зондов с окололунной орбиты на поверхность Луны. В частности, предлагалось использовать следующие зонды:
- пенетрометры массой 2,3 кг, оснащенные телеметрической аппаратурой;
- контейнеры с треххлористым фтором и алюминием для спектральных исследований грунта (в момент удара о поверхность Луны компоненты вступают в реакцию и создают яркую вспышку);
- надувные баллоны диаметром 8 м и массой 3 кг для экспериментов по фотосъемке поверхности до падения зонда и после падения.
Проект не реализовывался.
 1.7. КА «Explorer» на орбите ИСЛ
1.7. КА «Explorer» на орбите ИСЛ
1.7.1. АМС «Lunar Explorer»
Программа «Lunar Explorer» являлась частью программы «Interplanetary Monitoring Platform» (IMP). В задачи программы IMP входили исследования магнитных полей Земли, Луны и Солнца, солнечной плазмы, метеорных частиц, космического излучения солнечного и галактического происхождения, а также изучение магнитогидродинамического «шлейфа» Земли с помощью непилотируемых автоматических станций. Исследования проводились с орбит ИСЗ и ИСЛ. Программа «Lunar Explorer» (другие название: LIMP - Lunar IMP; AIMP - Anchored IMP; LAIMP - Lunar Anchored IMP), разрабатывавшаяся в 1963-1967 годах, предусматривала проведение исследований с окололунной орбиты.
Разработку АМС «Lunar Explorer», как и других аппаратов IMP, по заказу NASA выполняла фирма Westinghouse Electric.
На окололунную орбиту планировалось вывести две АМС: IMP-D и IMP-E (IMP-4 и IMP-5). Параметры расчетных орбит: периселений 480-1 500 км, апоселений 3 200-9 700 км, период обращения 5-16 часов.
Устройство АМС «Lunar Explorer» аналогично устройству спутников IMP-1 - IMP-3 и IMP-6. Корпус восьмигранной формы имеет высоту 20 см, диаметр описанной окружности - 71 см.
На АМС устанавливалась следующая научная аппаратура:
- прибор для исследования космических лучей;
- прибор для исследования электронов и протонов;
- прибор для исследования метеорных частиц;
- магнитометры;
- прибор для исследования разреженной ионизированной газовой оболочки Луны;
- прибор для исследования плазмы;
- прибор для исследования распростанения радиоволн;
- прибор для селенодезических исследований.
Отличием «Lunar Explorer» от околоземных спутников IMP являлась установка тормозного РДТТ для выхода на окололунную орбиту. Энергопитание аппаратуры обеспечивалось серебряно-цинковыми аккумуляторами и солнечными батареями. АМС стабилизировались вращением со скоростью более 100 об/мин. После выхода на заданную орбиту скорость вращения с помощью грузиков на тросах снижалась до 20 об/мин.
Расчетное время работы АМС - 6 мес.
Полная высота АМС - 111,8 см, поперечный размер по солнечным батареям - 277,0 см. Масса АМС около 100 кг, в т.ч. 36,3 кг - масса РДТТ и 9 кг - масса научных приборов. Запуск АМС производился ракетой-носителем Thorad-Delta.
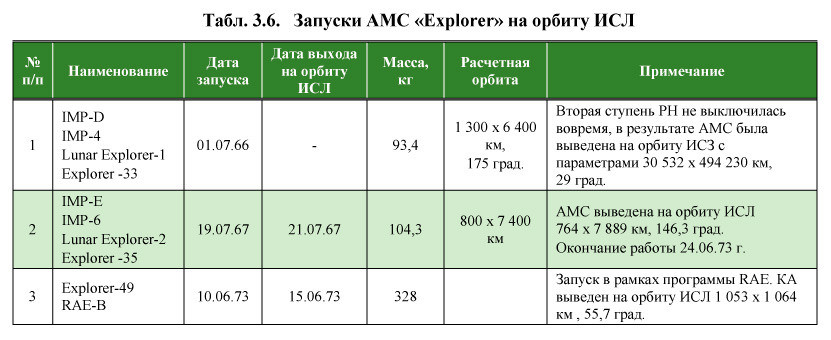
Данные о запусках АМС «Lunar Explorer» приведены в табл. 3.6.
 1.8. КА «Lunar Viking»
1.8. КА «Lunar Viking»
Фирма Martin, головная по разработке АМС «Viking», в 1970 году получила контракт от NASA на изучение возможности модификации посадочных модулей «Viking» для изучения Луны.
Проекты советских лунных автоматических КА 1961-1970 гг.
Карфидов В. «Космонавтика», 2021 г.
1.2.2. Мягкая посадка
Е6 - автоматическая станция состояла из собственно посадочного блока, доставляемого на поверхность Луны, и транспортного блока, осуществлявшего корректировку траектории при полете к Луне и торможение при подлете к Луне.
В состав транспортного блока входили: корректировочно-тормозная двигательная установка (КТДУ) тягой до 4,6 тс, топливные баки, системы астронавигации, ориентации, телеметрии и
радиосвязи, а также научные приборы для продолжения исследования околоземного пространства:
- газоразрядные счетчики корпускулярных частиц;
- пьезоэлектрические детекторы микрометеоритов;
- детекторы космического излучения.
Часть этих систем располагалась в блоках, которые сбрасывались перед включением КТДУ при подлете к Луне. КТДУ включалась на высоте 75 км и работала в режиме торможения до высоты около 260 м. Дальнейшее торможение происходило в режиме «парашютирования» с помощью двигателей управления. По сигналу датчика-щупа АМС отделялась от транспортного блока и падала на поверхность Луны со скоростью не более 15 м/с. Для смягчения удара АМС снабжалась надувным амортизатором. Внешняя оболочка АМС была выполнена в виде четырех раскрываемых лепестков, которые предохраняли аппаратуру АМС от соударения с поверхностью Луны, обеспечивали необходимое положение АМС после раскрытия, а также являлись антеннами для телевизионного устройства.
Состав научного оборудования АМС был минимальным:
- телевизионная камера;
- детектор корпускулярного излучения;
- гамма-спектрометр.
Угол зрения телекамеры составлял 360° по горизонтали и 36° по вертикали, размер панорамы - 6 000 х 500 пикс.
Масса АМС - 84-100 кг, стартовая масса всей станции - 1 440-1 580 кг. Высота АМС с антеннами 1,12 м, диаметр по раскрытым посадочным лепесткам - 1,6 м. Расчетное время работы АМС на Луне - 5 суток.
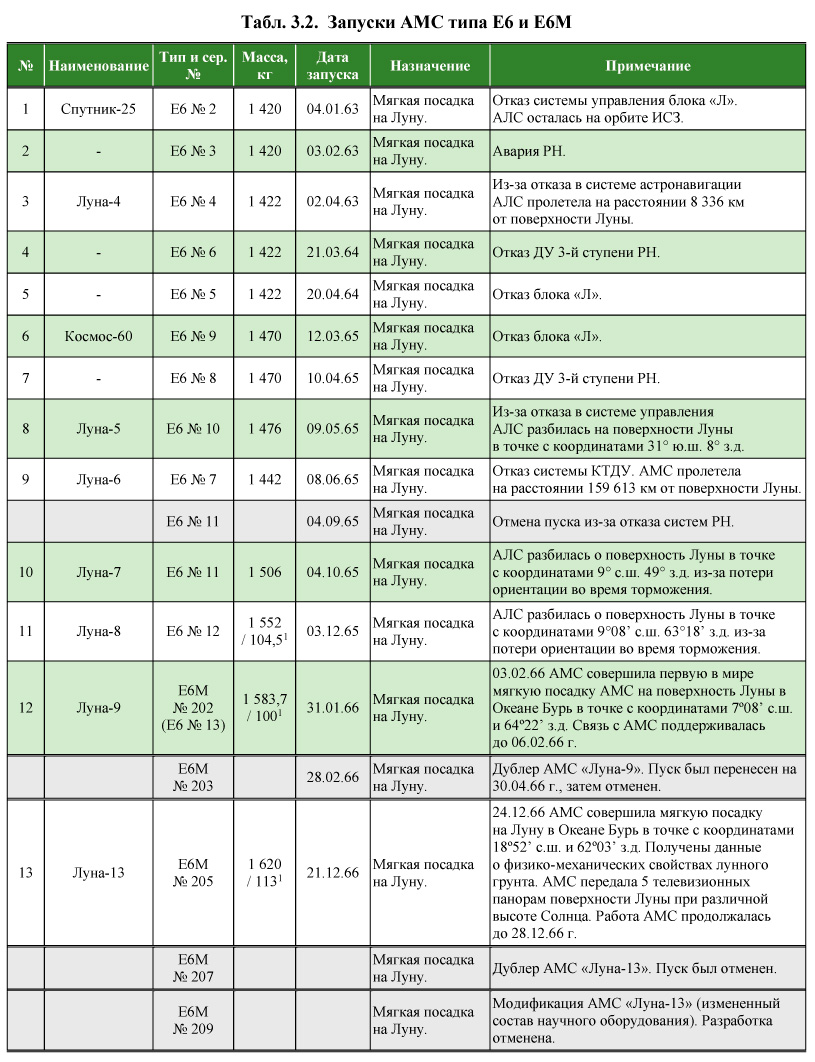
Первая попытка осуществления мягкой посадки была предпринята в январе 1963 года, но достичь успеха удалось только через три года - с двенадцатой попытки. После неудачи АМС «Луна-8» было высказано предположение, что станция теряет ориентацию при наддуве амортизирующей оболочки. Устранение этой причины было осуществлено уже специалистами ОКБ им. С.А. Лавочкина.
В 1965 году все материалы по межпланетной тематике были переданы из ОКБ-1 в ОКБ им. С.А. Лавочкина, которым руководил Г.Н. Бабакин.
Е6М - модифицированный вариант АМС Е6. Основным изменением было перенесение аппаратуры наддува амортизирующей оболочки АМС из отделяемых блоков на основную конструкцию транспортного блока. Это позволило производить наддув оболочки после начала работы КТДУ, благодаря чему для поддержки ориентации АМС во время наддува использовались рулевые сопла КТДУ, более мощные, чем газовые сопла системы ориентации.
Первая АМС Е6М №202 была собрана с использованием задела, переданного ЗЭМом, поэтому иногда ее считают последней АМС Е6 производства королёвской фирмы. Как бы то ни было, именно модифицированная специалистами ОКБ им. С.А. Лавочкина АМС Е6М «Луна-9» совершила первую в истории человечества мягкую посадку на Луну (и вообще на иное небесное тело).
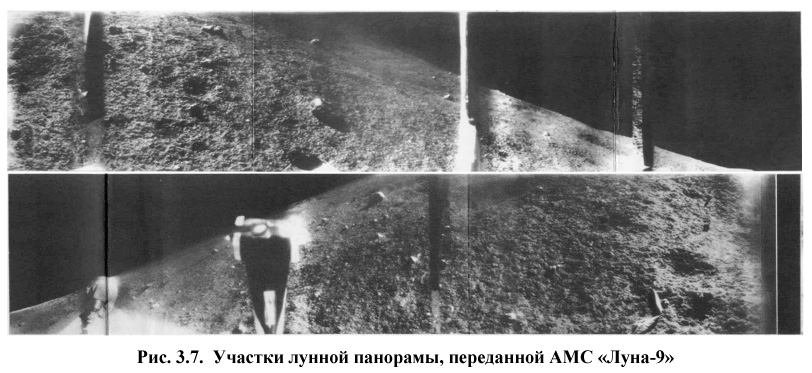
Это произошло 03.02.66 - АМС «Луна-9» совершила мягкую посадку на поверхность Луны в Океане Бурь в точке с координатами 7° 08' с.ш. и 64° 22' з.д. АМС передала 3 панорамы поверхности Луны при разной высоте Солнца над лунным горизонтом. Гамма-спектрометр вышел из строя еще до старта, поэтому работа с ним не проводилась.
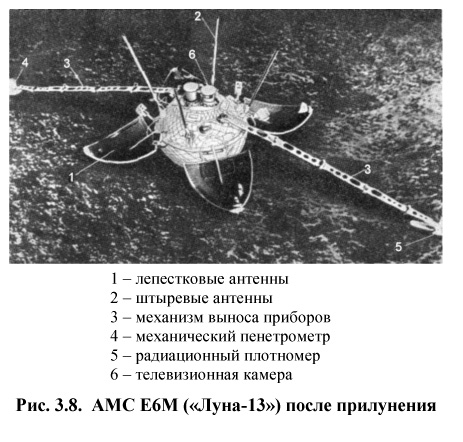
В дальнейшем автоматическая станция Е6М силами КБ им. С.А. Лавочкина была еще несколько усовершенствована и снабжена расширенным набором научного оборудования. АМС была оснащена двумя раздвижными механизмами, с помощью которых после посадки на грунт выдвигались приборы для изучения физико-механических свойств лунного грунта и определения его состава.
Состав научных приборов АМС Е6М:
- трехосный посадочный акселерометр;
- 2 телевизионные камеры;
- инфракрасный радиометр;
- грунтомер-пенетрометр;
- радиационный плотномер;
- детектор корпускулярного излучения.
Гамма-спектрометр, устанавливавшийся на АМС Е6, в составе аппаратуры АМС Е6М отсутствовал.
Масса АМС возросла до 113 кг, а полный вес АМС - до 1 620 кг. Запуск одной АМС этого типа - «Луна-13», - состоялся в конце 1966 года и завершился успешным повторением мягкой посадки. С помощью трехосного акселерометра была получена информация о механических характеристиках грунта до глубины 20-30 см. Были измерены температура на поверхности грунта и уровни радиационного излучения. Проведена телесъемка поверхности Луны. Одна из телекамер вышла из строя, поэтому получить стереоизображения, как это планировалось, не удалось.
 1 Масса АМС при старте с Земли / масса АМС после посадки.
1.2.3. «Интернационал» с орбиты Луны
1 Масса АМС при старте с Земли / масса АМС после посадки.
1.2.3. «Интернационал» с орбиты Луны
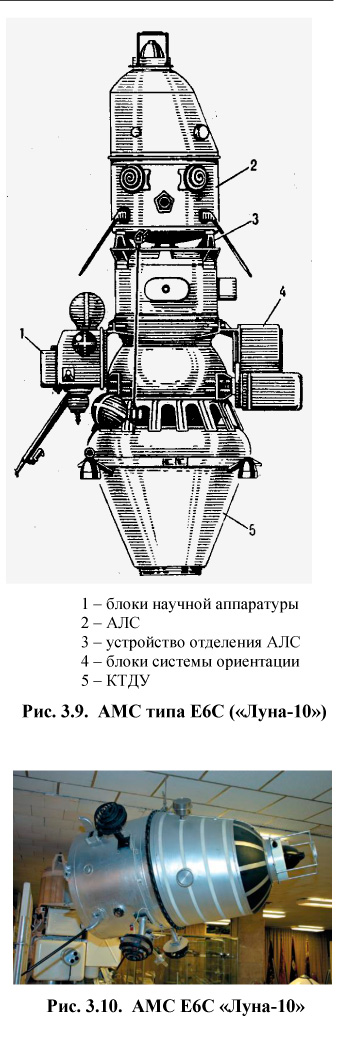
Е6С (Е6 Спутник) - АМС, предназначенная для отработки техники выведения автоматических станций на окололунную орбиту. Аналогично базовому варианту, состояла из двух блоков: транспортного - такого же, как у АМС типа Е6, - и блока с аппаратурой для работы на селеноцентрической орбите. После выхода на орбиту ИСЛ происходило отделение АМС от транспортного блока. Аппаратура ИСЛ снабжалась электроэнергией от химических батарей, по истощении заряда которых АМС прекращала работу.
Состав научной аппаратуры АМС Е6С:
- магнитометр;
- гамма-спектрометр для исследования излучения лунной поверхности;
- пять газоразрядных счетчиков;
- две ионных ловушки;
- радиометр для регистрации корпускулярного излучения;
- пьезоэлектрические детекторы микрометеоритных частиц;
- инфракрасный детектор;
- счетчики низкоэнергетических рентгеновских лучей.
Масса АМС Е6С - 248,5 кг.
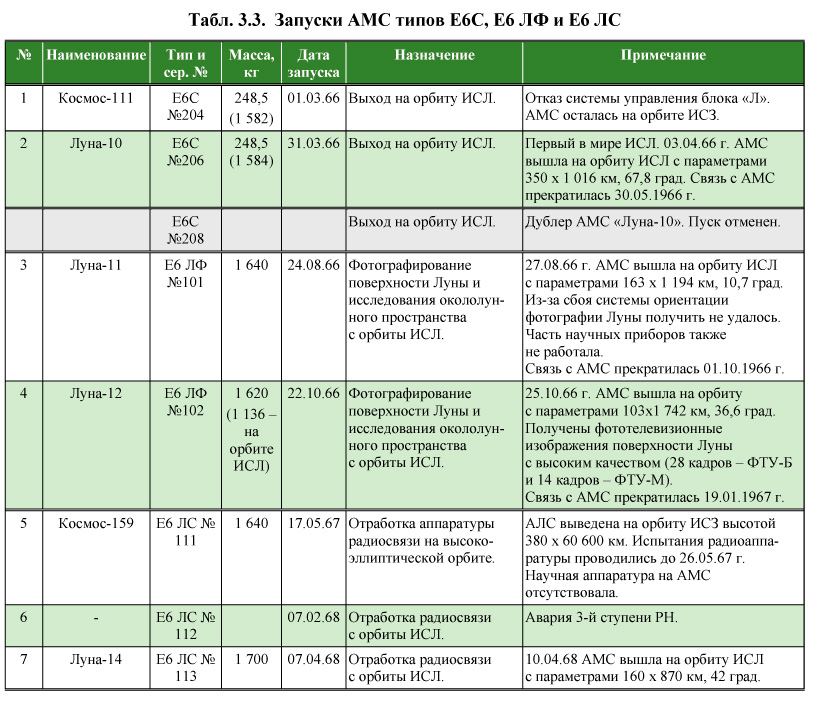
Было предпринято две попытки запуска АМС типа Е6С. Первая закончилась неудачей из-за сбоя в системе управления разгонного блока «Л», второй запуск был успешным - впервые в мире был создан искусственный спутник Луны (ИСЛ) «Луна-10». Запуск был приурочен к XXIII съезду КПСС, в ознаменование чего «Луна-10» транслировала с окололунной орбиты «Интернационал».
Е6 ЛФ (Лунный Фотограф) - АМС, предназначенная для изучения окололунного пространства с орбиты ИСЛ и детального фотографирования поверхности Луны в районах, намеченных для высадки пилотируемых экспедиций. В отличие от АМС типа Е6С, разделение блоков на орбите ИСЛ не производилось.
Состав научной аппаратуры:
- две фототелевизионных установки (ФТУ-Б и ФТУ-М);
- гамма-спектрометр;
- детектор микрометеоритов;
- радиометр;
- детектор рентгеновского излучения;
- длинноволновый радиометр;
- спектрофотометр;
- экспериментальный редуктор для исследования работы зубчатой передачи в вакууме.
ФТУ имели фокусные расстояния объективов 500 мм (ФТУ-Б) и 110 мм (ФТУ-М). Запас пленки каждого ФТУ был рассчитан на 42 кадра размером 24 х 24 мм, или 1 100 х 1 100 элементов в кадре. В зависимости от высоты орбиты разрешение изображений составляло 5-20 метров.
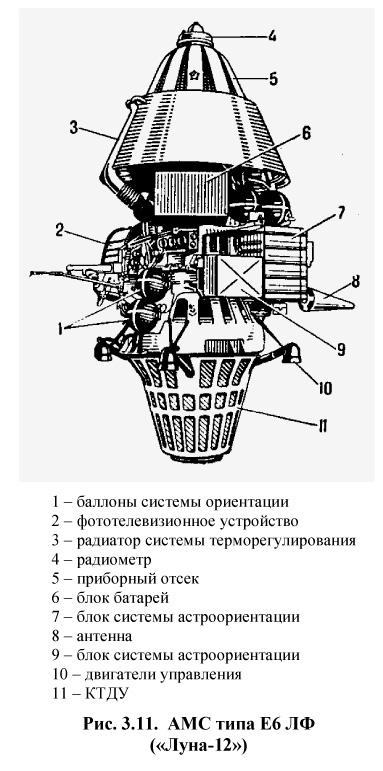
Масса АМС - 1 640 кг.
Было выполнено два запуска АМС этого типа - «Луна-11» и «Луна-12». Первый запуск был неудачный, АМС вышла на окололунную орбиту, но из-за сбоя в аппаратуре фотоизображений лунной поверхности получить не удалось. Вторая АМС, - «Луна-12», - была успешно выведена на окололунную орбиту и полностью выполнила программу полета.
Е6 ЛС (Лунная Связь) - АМС, предназначенная для отработки радиосвязи с пилотируемыми КК, находящимися на орбите ИСЛ вне зоны видимости с Земли. Кроме радиоаппаратуры, АМС несла научные приборы для продолжения изучения окололунного пространства:
- радиометр;
- тканевый дозиметр;
- экспериментальные редукторы и подшипники для отработки функционирования в вакууме.
После испытания аппаратуры АМС на высокоэллиптической орбите («Космос-159») было осуществлено две попытки запуска АМС этого типа, но только одна оказалась успешной - АМС «Луна-14». Масса АМС - около 1 640 кг.
В табл. 3.3 приведена краткая информация по запускам АМС типов Е6С, Е6 ЛФ и Е6 ЛС.
 Е7 (1960 г.)
Е7 (1960 г.) - проект ОКБ-1 АМС, выводимой на орбиту ИСЛ. РН - 8К72. Предварительный проект существовал в 1959-1960 году, до принятия решения об использовании универсального транспортного блока как для осуществления мягкой посадки (АЛС Е6), так и для создания искусственного спутника Луны. В 1965 г. материалы по проекту Е7 были переданы в ОКБ им. С.А. Лавочкина.
Эскизный проект АМС Е7, разработанный ОКБ им. С.А. Лавочкина, был выпущен в апреле 1966 года.
Е7 (1965-1966 гг.) - проект АМС для выведения на орбиту ИСЛ. Основное назначение:
- телевизионная съемка поверхности Луны с возможностью трансляции изображений по общесоюзному телевидению;
- телевизионная съемка участков поверхности в районах предполагаемых высадок пилотируемых экспедиций по программе Н1-Л3;
- фотографирование отдельных участков лунной поверхности со сверхвысоким разрешением;
- проведение научных исследований.
Энергопитание аппаратуры обеспечивали две панели солнечных батарей общей площадью 7 м
2.
Для обеспечения канала радиосвязи высокой пропускной способности на АМС предполагалось установить остронаправленную антенну с механизмом поворота, отслеживающим наведение антенны с высокой точностью.
На АМС должны были устанавливаться два фототелевизионных устройства (ФТУ) и три телекамеры с поворотными зеркалами. ФТУ должны были оснащаться объективами МТО-1000, запас пленки каждого ФТУ - 1 000 кадров. При съемке с высоты 5-6 км ФТУ обеспечивали съемку в каждом кадре участка поверхности размером 1,2 х 1,2 км с разрешением 1,5-2 м.
Конструктивно АМС состояла из КТДУ, аналогичной использовавшейся на АМС Е6, сферического топливного бака диаметром 1,04 м, приборного контейнера и навесного оборудования. Приборный контейнер имел вид цилиндра с полусферическими днищами. Диаметр контейнера 1,04 м, длина - 1,9 м. ФТУ размещались внутри приборного контейнера, а телекамеры и блоки научной аппаратуры - снаружи.
Масса АМС составляла по проекту 1 578 кг, в т.ч. 36 кг - научная аппаратура.
Запуск АМС Е7 рассчитывался на РН 8К78М с разгонным блоком Л. АМС планировалось выводить на окололунную орбиту 400 х 1 000 км, с последующим понижением периселения до 50-60 км. Телесъемка поверхности с помощью ФТУ должна была проводиться в течение 11-12 суток в режиме трехосной стабилизации, после чего АМС планировалось переводить в режим стабилизации закручиванием, и в течение 1,5-2 месяцев выполнять научные исследования.
Программой предлагалось осуществить два запуска АМС Е7 в 1967 году, и три запуска - в 1968 году.
АМС Е7 не изготавливалась, т.к. было принято решение о разработке более простых АМС Е6С и Е6 ЛФ для завоевания приоритета в создании искусственного спутника Луны.
1.2.4. Проект Л2 (1960-1963 гг.)
В 1960 году в ОКБ-1 начались работы по проектированию лунного самоходного аппарата для исследования различных районов лунной поверхности. Проект Л2, задачей которого являлась доставка лунохода Е8 в район высадки будущей пилотируемой экспедиции, являлся частью программы космических полетов на Луну.
Основной задачей проекта Л2 являлась доставка на поверхность Луны самоходной АМС Е8 с целью исследования лунной поверхности и выбора места для высадки пилотируемой экспедиции. Схема полета комплекса Л2 аналогична схеме полета Л1 - запуск на орбиту ИСЗ «буксира» 9К и четырех «танкеров» 11К, поочередная автоматическая стыковка и заправка «буксира». Последней стартует РН, несущая комплекс 13К, в состав которого входит самоходный аппарат Е8. «Буксир» 9К разгоняет комплекс на траекторию полета к Луне, после чего отбрасывается.
Масса комплекса Л2 (13К+9К) перед стартом с орбиты ИСЗ - 23 т, в том числе масса комплекса 13К - 5 т.
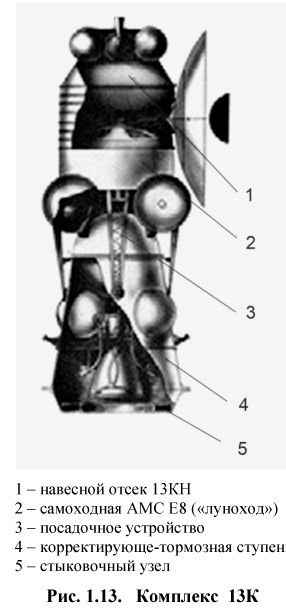
1.2.4.1. Комплекс 13К
13К - комплекс для доставки самоходной АМС Е8 на поверхность Луны. Комплекс состоит из корректирующе-тормозной ступени, посадочного устройства и собственно самоходной АМС - лунохода Е8, а также навесного отсека 13КН. Навесной отсек 13КН содержит двигательную установку с топливными баками и навигационное оборудование, необходимое для обеспечения сближения и стыковки с «буксиром» 9К. После стыковки отсек 13КН отбрасывается. «Буксир» 9К отправляет комплекс 13К по траектории полета к Луне. ДУ корректирующе-тормозной ступени используется для коррекции траектории на участке полета «орбита ИСЗ - Луна» и для торможения при приближении к Луне. Предполагалась «прямая» посадка, без выхода на орбиту ИСЛ. Расчетная высота начала торможения над поверхностью Луны - 200-300 км. После окончания работы корректирующе-тормозная ступень отбрасывается, а посадочное устройство с закрепленным луноходом свободно падает на Луну. На высоте 4-5 м по сигналу щупа включаются РДТТ мягкой посадки, установленные на посадочном устройстве. Расчетная скорость посадки - 2-4 м/сек.
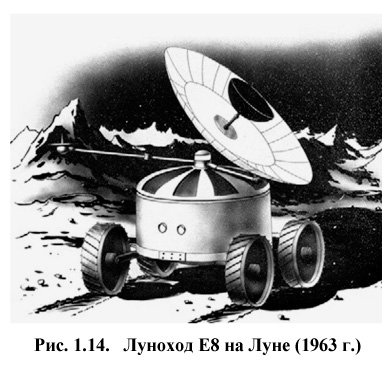
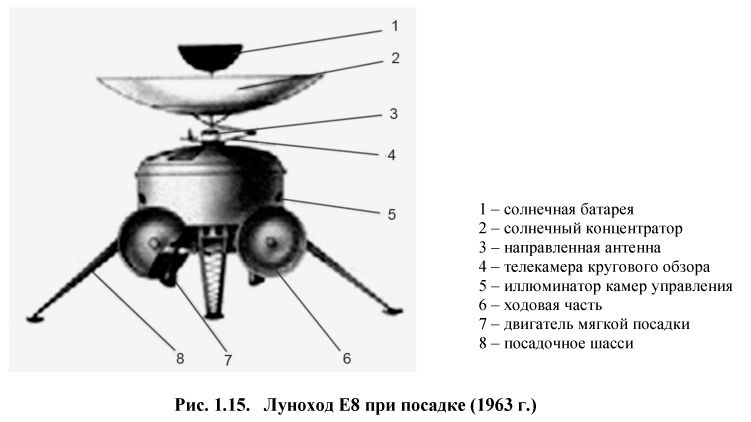
1.2.4.2. Луноход Е8 (1963 г.)
Е8 - самоходная АМС для исследования поверхности Луны. Состоит из трех основных частей:
- ходовая часть, обеспечивающая скорость перемещения до 4 км/час;
- отсек оборудования;
- источники питания, включающие солнечные батареи и радиоизотопный генератор.
Предполагалось, что луноход сможет проходить по поверхности Луны до 250 км за лунные сутки, а всего за время работы - до 2 500 км. Луноход в процессе работы должен был исследовать свойства лунного грунта, производить фотосъемку поверхности и рельефа, а также выполнять функцию радиомаяка при посадке пилотируемого КК. Масса лунохода Е8 - 800 кг.
 1.2.5. Проект Л2 (1965 г.)
1.2.5. Проект Л2 (1965 г.)
1.2.5.1. Комплекс Л2
К 1965 году схема доставки лунохода на Луну была доработана. Новая схема отличалась меньшей массой комплекса, отправляемого к Луне, и, как следствие, меньшим количеством пусков РН и сборочных операций на орбите ИСЗ.
В проекте также используется схема сборки на околоземной монтажной орбите. Первым пуском на орбиту выводится разгонный блок М, представляющий собой уменьшенную копию блока Д. Вторым пуском выводится комплекс Е8. В обоих пусках используется модифицированная РН 8К72.
Масса комплекса Л2, собираемого на орбите ИСЗ (Е8 + блок М), составляет 13 т.
Комплекс Е8 при стыковке с блоком М является активным. Комплекс состоит из следующих систем:
- блок Н - тормозная ракетная ступень, включающая маршевый двухкамерный ЖРД тягой 3,3 тс, однокамерный дросселируемый ЖРД с максимальной тягой 410 кгс и баки с запасами топлива;
- посадочное устройство с РДТТ, предназначенным для обеспечения мягкой посадки;
- самоходная АМС (луноход);
- оборудование, необходимое для стыковки с блоком М:
- стыковочный узел;
- сбрасываемый навесной приборный отсек;
- двигатели ориентации и системы управления сближением и стыковкой;
- двигатели причаливания и ориентации.
После сближения и стыковки блоков включается двигатель блока М, и комплекс Л2 переводится на траекторию полета к Луне. Для доразгона и коррекции траектории полета используется маршевый двигатель тормозного блока Н.
Масса комплекса Е8 при старте с орбиты ИСЗ - 7,3 т.
Доставка лунохода на Луну производится по прямой схеме, без выхода на орбиту ИСЛ. На высоте 75-100 км включается маршевый двигатель блока Н. При достижении высоты 5 км маршевый двигатель выключается, и включается дросселируемый ЖРД. На высоте 100-150 м блок Н отбрасывается, и посадочное устройство с закрепленным луноходом свободно падает на Луну. На высоте 4-5 м по сигналу щупа включается РДТТ мягкой посадки, обеспечивая скорость касания, близкую к нулевой.
1.2.5.2. Луноход
Корпус лунохода состоит из двух сферических днищ, соединенных шпангоутом диаметром 1,80 м. Радиус верхнего днища - 0,95 м, радиус нижнего днища - 1,70 м. На верхнем днище размещается солнечная батарея серповидной формы. АМС имеет гусеничное шасси, обеспечивающее скорость передвижения до 4 км/ч.
В запусках комплекса Е8 на Луну должны были решаться следующие задачи:
- отработка конструкции посадочного устройства и аппаратуры, обеспечивающей мягкую посадку космического аппарата на поверхность Луны;
- изучение района лунной поверхности в месте предполагаемой посадки первой лунной экспедиции;
- выбор посадочно-взлетной площадки для корабля лунной экспедиции;
- использование лунохода в качестве радиомаяка при посадке пилотируемого КК;
- визуальное наблюдение за посадкой и взлетом лунного экспедиционного корабля;
- проведение комплексных научных исследований лунной поверхности;
- отработка элементов конструкции и бортовой аппаратуры самоходного аппарата для передвижения космонавтов по поверхности Луны.
Масса лунохода Л2 - 640 кг. Планировалось, что луноход проработает на Луне 3-6 месяцев. Двигаясь со скоростью 4 км/ч в течение 6-8 часов ежесуточно, луноход мог бы пройти за время работы до 1 500 км.
1.2.6. АЛС Е8 ЛС (1963-1965 гг.)
Е8 ЛС (1963-1965 гг.) - проект автоматической лунной орбитальной станции на базе комплекса Е8. Станция Е8 ЛС должна была провести с орбиты ИСЛ фотосъемку с высоким разрешением предполагаемых мест посадки - сначала для АМС Е8, а затем для пилотируемых экспедиций.
В 1965 году все материалы по проекту Е8 были переданы в ОКБ им. С.А. Лавочкина.
1.3. «Луноходы» и «Луночерпалки»
1.3.1. Грузовая платформа «Земля-Луна»
Создание В.Н. Челомеем мощной РН «Протон» и ее успешное дополнение блоком Д, разработанного в рамках проекта супер-ракеты Н-1, позволило КБ им. С.А. Лавочкина переориентировать проект Е8 с использования маломощной РН 8К72 и стыковочной техники на запуск единого комплекса с помощью уже проходившей летные испытания РН 8К82К.
Е8 - универсальный тяжелый автоматический комплекс, состоящий из посадочной ступени КТ и лунохода 8ЕЛ. В других модификациях использовался для доставки других объектов, в частности, ракеты для доставки на Землю лунного грунта.
Запуск и полет комплекса Е8 происходил по следующей схеме:
- старт РН 8К82К с разгонным блоком Д и комплексом Е8;
- выход блока Д и комплекса Е8 на промежуточную орбиту ИСЗ;
- уточнение параметров промежуточной орбиты наземной службой;
- раскрытие опор шасси ступени КТ;
- старт блока Д с промежуточной орбиты и переход на траекторию перелета к Луне;
- отделение блока Д;
- две коррекции траектории с помощью ДУ ступени КТ;
- включение ДУ ступени КТ при подлете к Луне для перехода на орбиту ИСЛ высотой 120 км;
- переход на орбиту с периселением 20 км над выбранной точкой посадки;
- уточнение и корректировка орбиты;
- сброс подвесных приборных контейнеров;
- включение ДУ ступени КТ и торможение до скорости 0 м/сек на высоте 2,3 км;
- снижение с выключенной ДУ до высоты 700 м;
- включение основной ДУ и снижение до высоты 20 м;
- выключение основной ДУ ступени КТ и включение двигателей малой тяги;
- выключение двигателей малой тяги на высоте 1-2 м;
- посадка ступени КТ на поверхность Луны;
- начало работы доставленного на Луну аппарата.
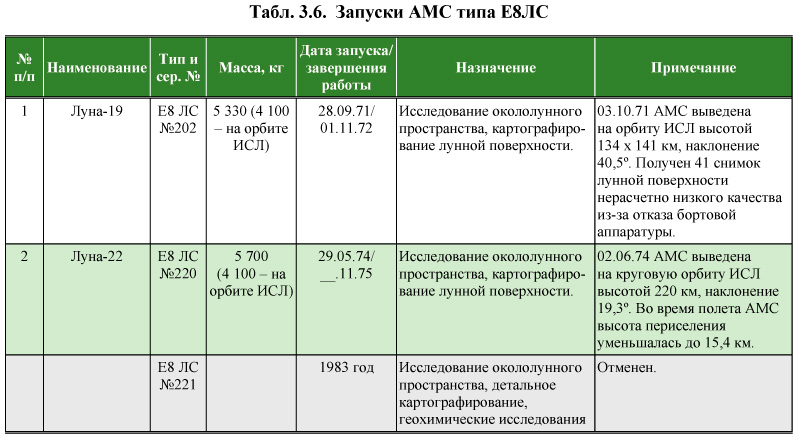
Таким образом, реализованная схема посадки с окололунной орбиты (в отличие от прямой посадки АМС Е6 и Е6М), обеспечивала доставку полезного груза в заданную точку поверхности Луны с высокой точностью. Масса комплекса Е8 при старте - 5 300-5 800 кг, на орбите Луны - 4 100 кг, на поверхности Луны - около 1 900 кг. Масса доставляемого полезного груза около 900 кг. Ракета-носитель - РН 8К82К «Протон» с блоком Д 11С824 в качестве четвертой ступени.
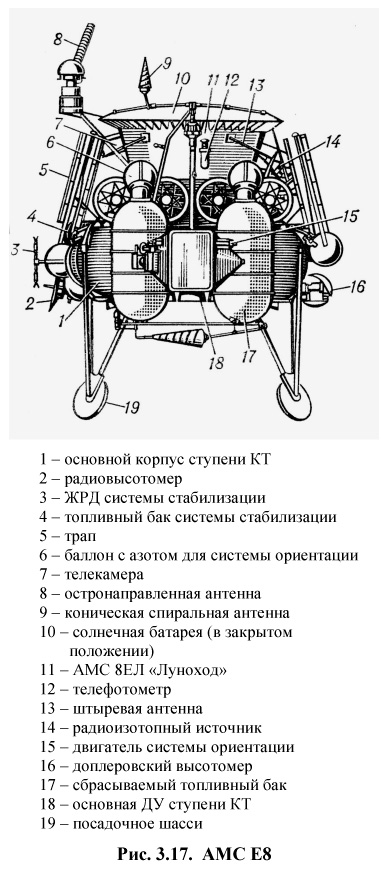
КТ - универсальная посадочная ступень для доставки на поверхность Луны автоматических лунных станций различного назначения. Имеет раскрываемое четырехопорное шасси. Основной корпус выполнен в виде четырех сферических топливных баков, соединенных цилиндрическими обечайками. В цилиндрических отсеках корпуса размещены источники электропитания, навигационное и коммуникационное оборудование. Снаружи основного корпуса подвешиваются сбрасываемые отсеки. Каждый сбрасываемый отсек состоит из двух топливных баков и размещенных между ними приборных контейнеров, в которых находится аппаратура, работающая на участке перелета «орбита ИСЗ - орбита ИСЛ».
Двигательная установка посадочной ступени состоит из основного двигателя с регулируемой тягой (от 750 кгс до 1 929 кгс) и двух двигателей малой тяги. Основной двигатель имеет возможность многократного включения.
На ступени установлены телефотометры и научная аппаратура для определения температурной и радиационной обстановки.
Масса ступени 4 850 кг, в т.ч. 3 435 кг топлива (в основных и сбрасываемых топливных баках).
Ступень КТ обеспечивает доставку с орбиты ИСЛ на поверхность Луны груза около 900 кг.
Использовалась в следующих вариантах:
- Е8 - с луноходом 8ЕЛ;
- Е8-5 - с АМС для забора лунного грунта и доставки его на Землю;
- Е8 ЛС - в варианте ИСЛ.
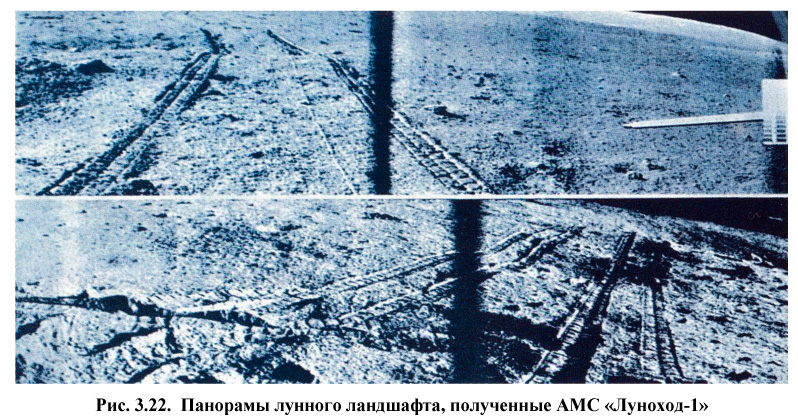
При доставке лунохода на ступени КТ с двух сторон монтировались откидные трапы для съезда лунохода. После посадки и опускания трапов проводилась телесъемка панорамы для осмотра поверхности и выбора маршрута съезда лунохода и начала его движения.
При доставке АМС для взятия лунного грунта на ступени монтировалось откидное устройство с бурильной установкой и механизмом загрузки пробы грунта в возвращаемый аппарат.
В варианте Е8 ЛС ступень КТ не имела посадочного шасси, ее основное назначение было обеспечить выведение на орбиту ИСЛ полезного груза (исследовательской аппаратуры) и проведение необходимых маневров.
1.3.2. «Лунный трактор»
Главной задачей проекта Е8 была доставка на Луну самоходного аппарата. Этот проект, начатый в ОКБ-1 и реализованный в ОКБ им. С.А. Лавочкина, был творческой переработкой проекта Л2, задуманного С.П. Королевым в 1963 году. Самоходный лунный аппарат, доставляемый на Луну, был сконструирован коллективом ОКБ им. С.А. Лавочкина и получил название «Луноход». Самоходное шасси для лунохода было создано во ВНИИ ТрансМаш под руководством А.Л. Кемурджиана.
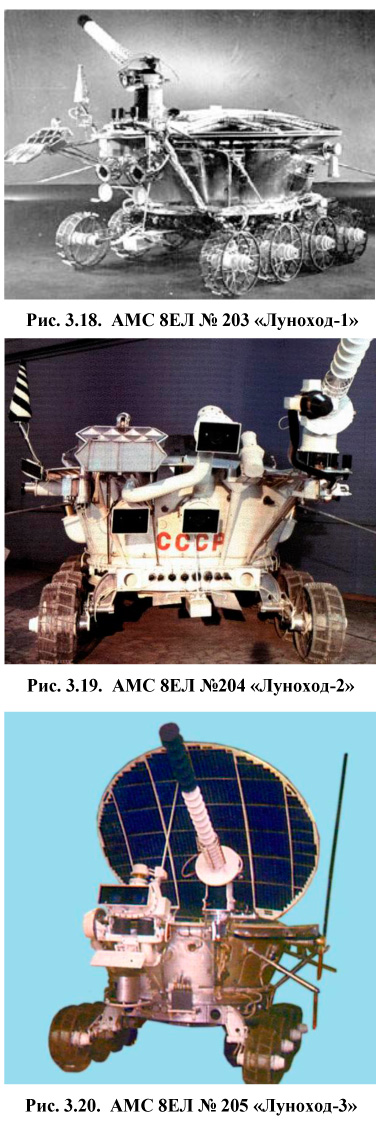
«Луноход» 8ЕЛ - самоходная беспилотная АМС на восьмиколесном шасси. Размеры колес: ширина 200 м, диаметр 510 мм (с грунтозацепами), ширина колеи 1 600 мм, клиренс 170 мм. Каждое из колес имело привод от автономного электродвигателя. Максимальная скорость движения - 1,2 км/ч. Еще одно колесо (без привода), размещенное сзади, использовалось для точного измерении параметров движения.
Аппаратура «Лунохода» размещалась в герметичном корпусе круглой в плане формы. Высота «Лунохода» - 1,92 м, ширина - 2,15 м, длина с откинутой крышкой - 4,42 м. Масса «Лунохода» - около 760 кг. Расчетный срок работы «Лунохода» - 3 мес.
Энергосистема АМС состояла из двух радиоизотопных источников, серебряно-кадмиевых аккумуляторов и солнечной батареи, размещенной на нижней стороне откидываемой крышки корпуса. В течение лунного дня крышка находилась в откинутом состоянии, обеспечивая энергопитание аппаратуры и электродвигателей колес. При наступлении лунной ночи крышка по команде Земли закрывалась для сохранения тепла, и АМС оставалась в неподвижном «спящем» состоянии до наступления очередного дня. Система терморегулирования обеспечивала внутри приборного контейнера постоянную температуру около 20° С.
Мощность радиоизотопных источников составляла 750 Вт после запуска и 360 Вт через 3-4 месяца. Площадь солнечной батареи - 3,5 м
2, а вырабатываемая мощность - 180 Вт.
После восхода Солнца с Земли подавалась команда на «пробуждение», и «Луноход» приступал к работе. Управление движением «Лунохода» осуществлялось дистанционно по радио наземными экипажами, наблюдавшими за участком поверхности перед «Луноходом» через две телекамеры с круглыми защитными блендами. После получения очередного изображения экипаж выбирал направление и дальность возможного передвижения «Лунохода» и выдавал соответствующие команды. После перемещения Лунохода по полученным командам снова передавались телеизображения, и цикл передвижения повторялся.
Для получения изображений с более высоким качеством, чем обеспечивали навигационные телекамеры, АМС была оборудована четырьмя телефотометрами, с помощью которых были получены черно-белые фотографии окружающей обстановки, в том числе и панорамные.
Состав научной аппаратуры «Лунохода-1» 8ЕЛ №203:
- две телекамеры переднего обзора;
- телекамера заднего обзора;
- четыре фотометра;
- рентгеновский спектрометр для изучения химического состава лунного грунта;
- пенетрометр для определения механических характеристик лунного грунта;
- рентгеновский телескоп;
- радиометр;
- уголковый отражатель для лазерной локации с Земли.
В состав аппаратуры «Лунохода-2» 8ЕЛ №204 дополнительно были включены:
- ультрафиолетовый астрофотометр;
- трехкомпонентный магнитометр;
- фотодатчик;
- три телекамеры вместо двух, в прямоугольных блендах.
На «Луноходе-3» 8ЕЛ №205 устанавливались четыре фотокамеры, объединенные попарно в два блока, и расширенный комплекс научной аппаратуры.
Одной из основных задач, для которых задумывался «Луноход», являлось обследование предварительно выбранных районов Луны для выбора места посадки пилотируемого корабля. «Луноход» также должен был служить радиомаяком при посадке беспилотных и пилотируемых кораблей.
1 В 2014 году сотрудниками Московского государственного университета геодезии и картографии (МИИГАиК) и Университета Вашингтона в Сент-Луисе, США, по детальным фотоснимкам, которые были получены американской АМС LRO, было рассчитано, что полный путь, пройденный «Луноходом-1», составил 9,93 км, а «Луноходом-2» - 39,0 км.
Было предусмотрено также, что «Луноходы» могут использоваться в качестве аварийного транспорта для космонавта, прибывшего на Луну по программе Н1-Л3. Для этого на «Луноходе» спереди должны были монтироваться подножка и выдвижной пульт управления. В случае аварийной ситуации, когда космонавт по какой-либо причине не мог совершить взлет на КК, на котором совершил посадку, он должен был бы, встав на подножку и управляя вручную «Луноходом», доехать до резервного КК, который предварительно должен был совершить посадку в беспилотном варианте. «Луноход» в этом случае мог также управляться дистанционно с Земли.
Первый старт «Лунохода», планировавшийся на ноябрь 1968 года, но перенесенный на февраль 1969 года, был неудачным из-за аварии РН. Второй состоялся в ноябре 1970 года, когда на Луну был доставлен «Луноход-1», успешно проработавший одиннадцать лунных дней. Третий запуск также был успешным, «Луна-21» доставила на Луну «Луноход-2».
Четвертый пуск был отменен в связи с развертыванием работ по программе доставки марсианского грунта 5М, хотя и «Луноход-3», и ступень КТ для него были полностью готовы. Дальнейшие работы по «Луноходам» были свернуты из-за подготовки АМС для доставки грунта с невидимой стороны Луны. Предложение использовать «Луноход-3» повторно вносилось в 1983 году, но не было принято.
1.3.3. За лунным камнем
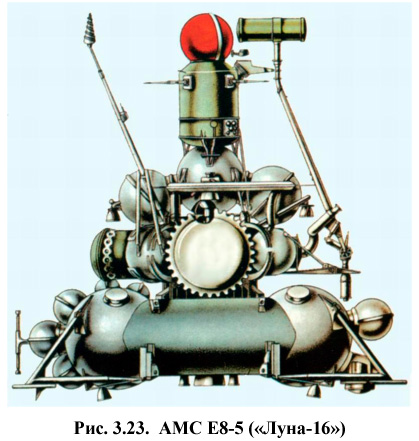
Для решения второй задачи проекта Е8 была создана уникальная система, состоящая из механизма забора лунного грунта, монтируемого на ступени КТ, и возвращаемой лунной ракеты, запускаемой с КТ, как со стартового стола. Эта АМС получила обозначение Е8-5.
Е8-5 - АМС для забора грунта в заданном районе поверхности Луны и доставки его на Землю.
На посадочной ступени КТустанавливался торовый приборный отсек, на котором, в свою очередь, размещалась взлетная ракета (ракета для перелета «Луна - Земля»). На ступени КТ было смонтировано грунтозаборное устройство (ГЗУ) на поворотной штанге. После выполнения мягкой посадки штанга поворачивалась, перенося ГЗУ на поверхность грунта. ГЗУ было оборудовано буровым снарядом, который обеспечивал забор столбика грунта (керна) диаметром 20 мм и высотой 320 мм. Для визуального осмотра места бурения на АМС устанавливались 2 телефотометра. После завершения бурения штанга переносила ГЗУ в верхнее положение и керн перемещался в возвращаемый аппарат взлетной ракеты.
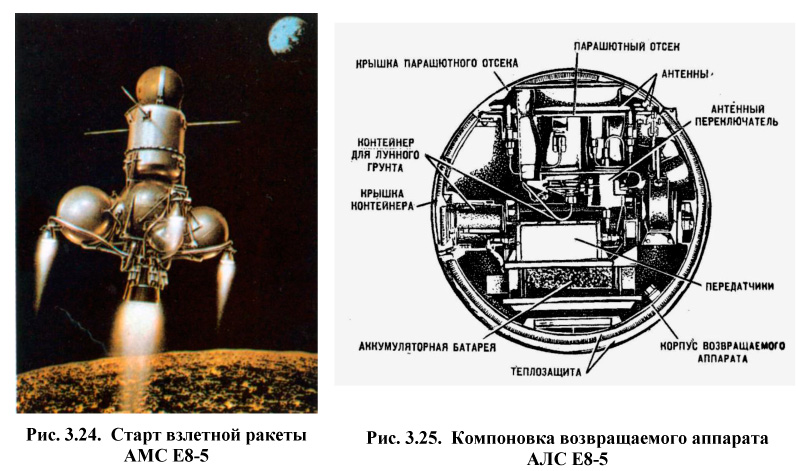
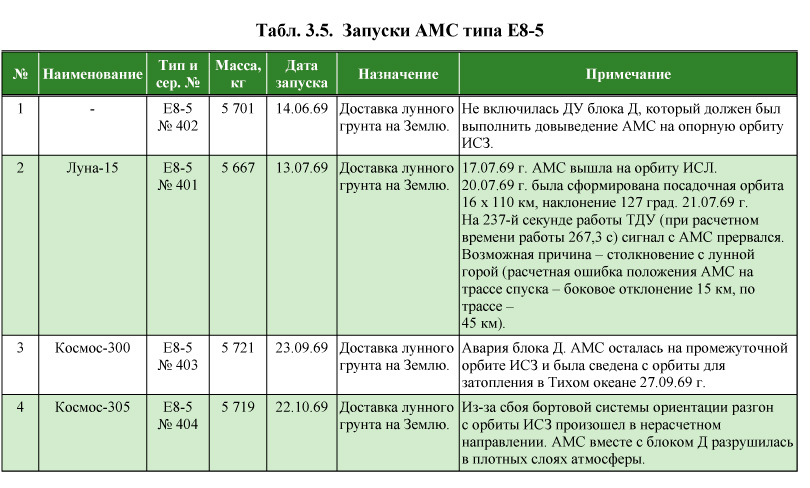
Взлетная ракета имела основной ЖРД тягой 1 850 кгс, работавший на тетраоксиде азота и НДМГ, и рулевые сопла для стабилизации в процессе взлета. Старт взлетной ракеты производился по команде с Земли в расчетный момент времени, который выбирался из условия попадания в заданный район поверхности Земли без коррекции траектории. Возвращаемый аппарат, имевший форму сферы диаметром 50 см, совершал в атмосфере Земли баллистический спуск с перегрузками до 315g и посадку на парашюте диаметром 3,6 м, после чего на нем включался радиомаяк для облегчения поиска спасательной службой.
В связи со специфичностью выполняемой задачи, АМС Е8-5 практически не имела научного оборудования, кроме приборов для измерения температурных и радиационных условий.
Масса АМС при старте около 5 700 кг, при посадке на Луну - около 1 880 кг. Масса взлетной ракеты - 512 кг, масса возвращаемого аппарата - 34 кг.
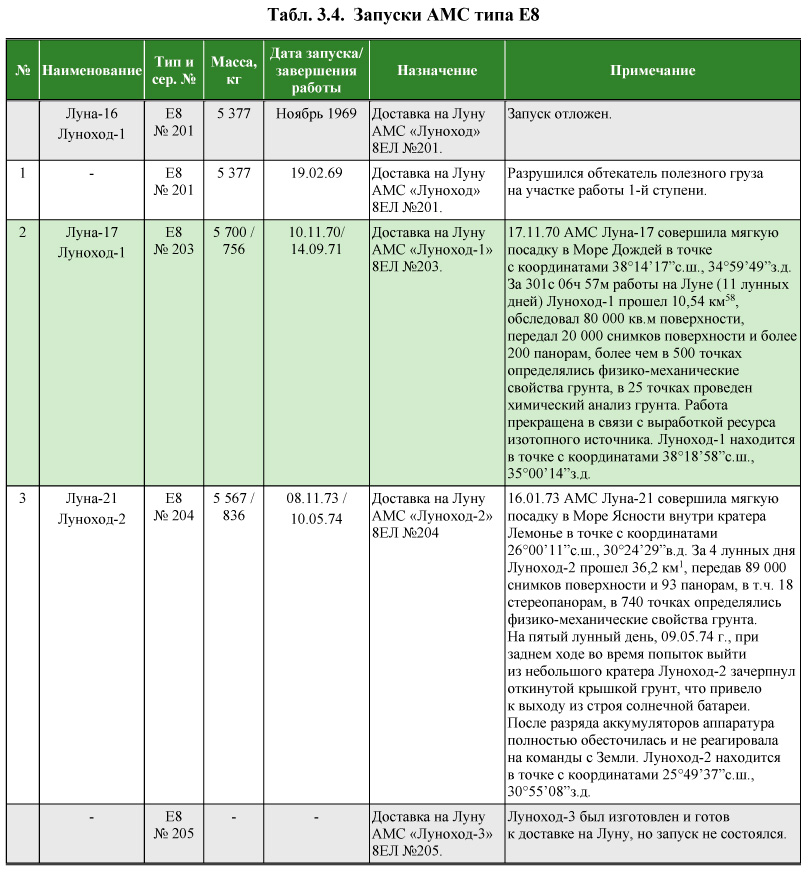
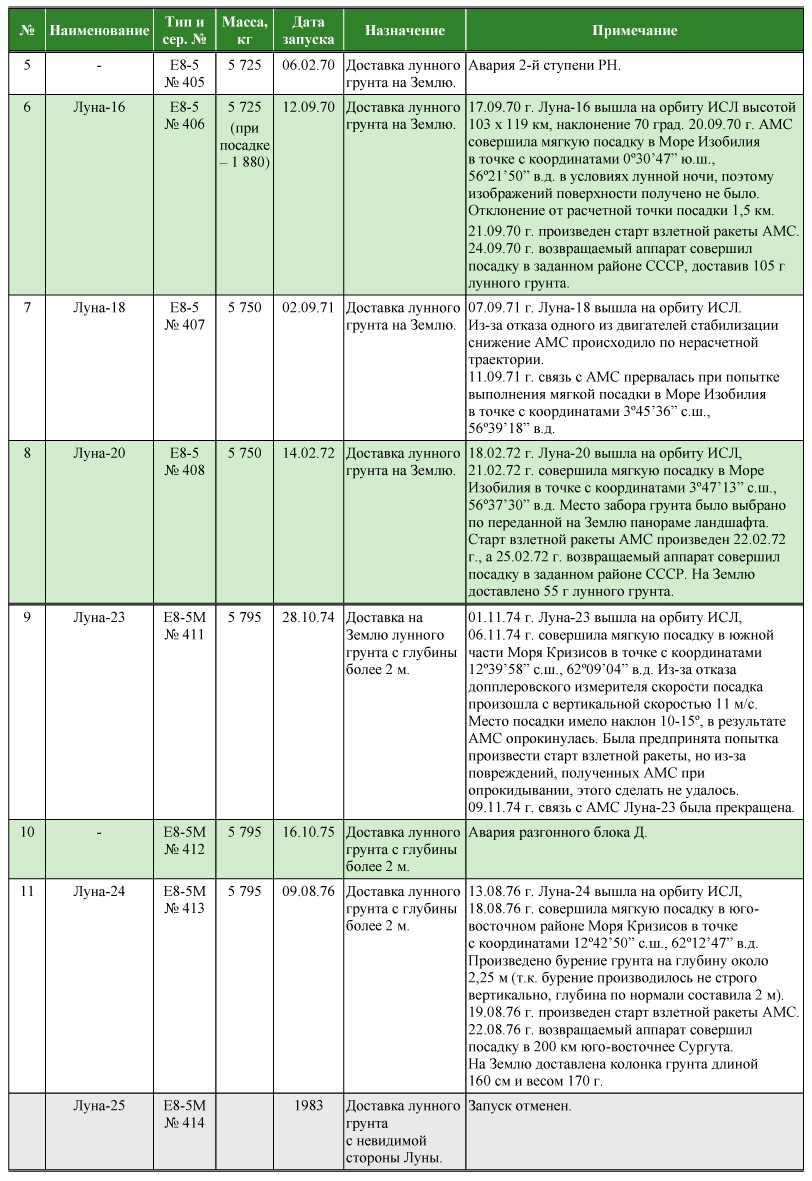
Было произведено 8 попыток запуска АМС Е8-5, из которых успешными оказались только две - АМС «Луна-16» и «Луна-20». Возвращаемые аппараты этих АМС доставили на Землю около 160 г лунного грунта. Четыре АМС не удалось вывести на траекторию полета к Луне, две АМС («Луна-15» и «Луна-18») разбились при посадке на Луну.
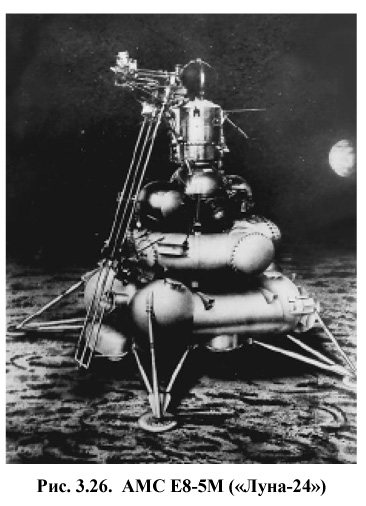
Е8-5М - модифицированная АМС для забора лунного грунта с большой глубины и доставки его на Землю. Модифицированное устройство позволяло бурить скальные грунты на глубину до 225 см.
В связи с дефицитом массы часть оборудования (в частности, телефотометры), в отличие от АМС Е8-5, не устанавливалась.
Масса АМС Е8-5М около 5 800 кг, масса взлетной ракеты 514,8 кг, масса возвращаемого аппарата 34 кг.
Было произведено три запуска АМС типа Е8-5М, два из которых завершились неудачей. Одна АМС («Луна-23») из-за отказа бортового измерителя скорости опрокинулась при посадке и не смогла выполнить программу. Вторую АМС не удалось запустить к Луне из-за аварии РБ. Третья АМС, «Луна-24», успешно выполнила программу полета, доставив на Землю пробы лунного грунта.
Еще одна АМС типа Е8-5М была изготовлена и готова к запуску, но из-за установленной на тот момент приоритетности программы доставки грунта с Марса (проект 5М) запуски АМС к Луне были отменены. После закрытия программы 5М, когда можно было ожидать возобновление программы лунных исследований, ресурсы аппаратуры уже были просрочены, и АМС не могла быть использована по назначению.
В 1978 году было предложено запустить АМС типа Е8-5М для доставки грунта с невидимой стороны Луны, с возможным сроком запуска 1983 год, но, в связи с загруженностью НПО им. С.А. Лавочкина работами по программам «Венера» и «Вега», подготовка этой АМС откладывалась, а затем была отменена в связи с принятием проекта «Луна-92». В 1987 году вопрос о доставке грунта с обратной стороны Луны был поднят снова, на этот раз с предложением осуществить такой пуск в 1996 году. Это предложение также не было реализовано.
Информация о запусках АМС Е8-5 и Е8-5М приведена в табл. 3.5.
 1.3.4. Лаборатория на орбите ИСЛ
1.3.4. Лаборатория на орбите ИСЛ
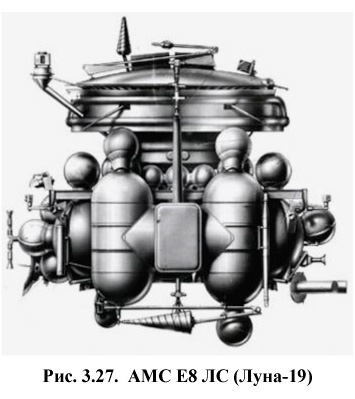
Е8 ЛС - АМС для фотографирования поверхности Луны и исследования параметров гравитационного поля Луны, в первую очередь гравитационных аномалий (масконов), в течение длительного полета по орбите ИСЛ. Кроме этого, АМС должна была проводить гамма-спектрометрическое изучение состава лунных пород.
АЛС создана на базе ступени КТ, которая, благодаря имеющимся в ее составе двигательной установке и системе ориентации, обеспечивала необходимое маневрирование, а также поддержание ориентации АМС во время фотографирования Луны. Посадочное шасси на ступени КТ не монтировалось. Сбрасываемые отсеки с аппаратурой и дополнительные баки в полете АМС Е8 ЛС не отделялись. Приборный контейнер АМС изготовлен на базе корпуса «Лунохода».
Для первого экземпляра АМС Е8 ЛС («Луна-19») даже был сохранен серийный номер использованной АМС 8ЕЛ №202.
Состав научной аппаратуры:
- две телекамеры;
- дозиметр;
- гамма-спектрометр;
- магнитометр;
- радио-высотомер;
- датчики микрометеоритов;
- датчики космического излучения;
- датчики радиации.
По программе АМС выводится на орбиту, близкую к круговой, высотой 140 км. После уточнения фактических параметров орбиты выполняется понижение периселения до 16-25 км. Телесъемка поверхности производится с полученной рабочей орбиты. Расчетный срок работы АМС - 3 месяца.
Масса АМС 5 700 кг.

Всего было произведено два запуска АМС типа Е8 ЛС. Первая АМС, «Луна-19», из-за отказа системы управления программу полета выполнила только частично. Телесъемка поверхности проводилась в режиме закрутки АМС, что привело к смазанности полученных изображений. Вторая из запущенных АМС - «Луна-22», - несколько отличалась по составу аппаратуры от «Луны-19». В частности, были установлены экспериментальные инженерно-технические устройства для исследования в вакууме твердых смазок и покрытий.
В течение длительных полетов двух АМС (более года каждый) получен большой объем информации о гравитационном поле Луны, а также научные данные о составе лунных пород и радиационных условиях в окололунном пространстве. Получены фотоизображения поверхности Луны с высот до 25 км, произведено альтиметрическое исследование ряда районов.
В 1978 году было предложено запустить еще одну АМС типа Е8 ЛС для детального картографирования Луны с орбиты высотой 100 км и продолжения геохимических исследований. Такой запуск мог бы состояться в 1983 году. Однако, из-за задержек по различным причинам, срок запуска был отодвинут на конец 80-х годов, а затем вообще отменен в связи с предполагавшимся началом работ по проекту АМС «Луна-92».
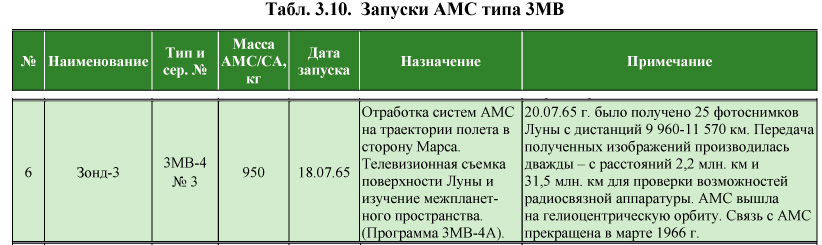
АМС 3МВ-4 №3 под названием «Зонд-3» была запущена 18.07.65 г. по программе 3МВ-4А - для испытаний фототелевизионного устройства и отработки дальней радиосвязи. АМС была выведена на траекторию, идентичную траектории полета к Марсу. Состав научных приборов АМС «Зонд-3» по сравнению с начальным вариантом АМС частично изменен. Так, вместо ионных ловушек и детектора ультрафиолетового и рентгеновского солнечного излучения были установлены ультрафиолетовый спектрограф и ультрафиолетовый и инфракрасный спектрофотометр. Были установлены также другие фототелевизионные устройства, с фокусными расстояниями объективов 200 мм и 500 мм. Наилучшая разрешающая способность - 100 м с расстояния 1 000 км. АМС «Зонд-3» произвела фотографирование части обратной стороны Луны, оставшейся не заснятой в 1959 году автоматической станцией «Луна-3».
Новости космонавтики 1995 №23:
25 лет Луноходу-1
17 ноября. К.Лантратов. НК. Этот аппарат, похоже, пользовался у простого советского обывателя особой любовью. Во всяком случае, он был приятен в отличие от большинства "мудреных научных спутников". Недаром практически все советские журналисты в своих репортажах тех времен сравнивали его с пределом мечтаний советских граждан начала 70-х годов - малолитражкой "Жигули". А зарубежные зимние сапоги "а-ля Нил Армстронг на Луне" прозвали не как-нибудь по-западному "мун-шузы", а вполне по-русски - "луноходы". Даже народный бард Владимир Высоцкий не обошел вниманием "лунный трактор".
Стоит также добавить, что в отличии от большинства космических "первенцев" (вроде Первого искусственного спутника Земли), этот Луноход-1 до сих пор существует материально. Он тихо-мирно стоит на Луне, как памятник самому себе. Если, конечно, в него не ударил какой-нибудь "шальной" метеорит...
Прекрасная серия Е
Луноход стал последним аппаратом серии Е, которую разрабатывали в королевском ОКБ-1. Четыре первых представителя этой серии станций начали разрабатываться в конце 1957 года. В декабре того же года в ОКБ-1 был уже готов эскизный проект аппаратов Е-1, Е-2, Е-3 и Е-4. О них Сергей Павлович Королев рассказал в докладе "О программе исследования Луны" в самом начале 1958 года. Все четыре типа лунных аппаратов должны были запускаться ракетой 8К72 (Восток) с двигателем РО-5 разработки КБ С.А.Косберга на третьей ступени, называвшейся также блок Е. Обозначение серия лунных станций Е получила по алфавитному порядку, в котором именовались разработки в ОКБ-1. Предшественником ее был аппарат Д-1, ставший Третьим советским искусственным спутником Земли. Есть, правда, еще одна версия, что серия получила свое название от ракетного блока Е ракеты 8К72.
Аппарат Е-1 предназначался для исследований на трассе Земля-Луна при полете по траектории прямого попадания. Неориентируемый аппарат выполнялся в виде приборного небольшого контейнера массой 170 кг, который отделялся от блока Е после выхода на траекторию полета к Луне. Из 5 запущенных аппаратов серии Е-1 с сентября 1958 года по июль 1959 года лишь один частично выполнил свою задачу, пролетев на расстояние порядка 6000 км от поверхности Луны (Е-1 №4, официальное название - Космическая ракета, позже переименован в Луну-1). В дальнейшем на основании данных, полученных при полете Е-1 №4 и американских станций серии Pioner, была произведена незначительная модификация приборного состава аппарата. Это сказалось и на изменении обозначения аппарата, который стал называться Е-1А. В сентябре 1959 станция Е-1А (Вторая космическая ракета, позже - Луна-2) с первой попытки попала в Луну.
Аппарат Е-2 предназначался для получения глобальных фотографий обратной стороны Луны с облетной траектории и последующей радиопередачи их на Землю. При проработке проекта облетная траектория была несколько изменена, так как первоначальный ее вариант требовал размещения приемных радиостанций около южного полярного круга. Вследствие этих баллистических изменений окончательный вариант станции получил обозначение Е-2А (масса 278.5 кг). Один аппарат этой серии был запущен в октябре 1959 года (Автоматическая межпланетная станция, позже переименованная в - Луну-3) и полностью выполнил задачу.
Аппарат Е-3 разрабатывался для более детальной, чем Е-2А, фотосъемки Луны с облетной траектории. Вместо фотокамер станции Е-2А с фокусным расстоянием 200 и 500 мм на Е-3 ставился фотоаппарат с одним объективом, фокусное расстояние которого было 750 мм. Также изменилась фототелевизионная система передачи полученных фотографий на Землю. В отличии от Е-2А станция Е-3 была неориентируемой. Корпус приборного контейнера аппарата были позаимствованы у станции Е-2А. В апреле 1960 года были предприняты две попытки запуска этих станций, обе неудачные.
Аппарат Е-4 предназначался для проведения мощного взрыва на Луне. Это было нужно для достоверного фиксирования факта попадания аппарата в Луну и для проведения с Земли спектрометрического анализа поднятых взрывом с поверхности частиц грунта. Так Королев предполагал узнать химический состав лунного грунта. Правда, вскоре после начала проработки этого проекта Королеву объяснили, что мерить он будет с Земли спектр отнюдь не лунных пород, а составных частей взрывчатки. Фиксацию же факта попадания, как выяснилось, можно было провести и более простым методом траекторных измерений. Проект Е-4 был закрыт в начале 1958 года еще на стадии выработки техзадания.
Чуть позже началась проработка пятого аппарата серии Е, предназначенного для выхода на орбиту искусственного спутника Луны. Для этого предполагалось использовать ракету 8К73, на третьей ступени которой должен был стоять двигатель РД-109 разработки ОКБ-456 В.П.Глушко. Однако из-за запаздывания работ по РД-109 в 1959 году была прекращена как разработка ракеты 8К73, так и аппарата Е-5.
После первых исследований Луны в 1959 году Сергей Павлович Королев предложил два новых проекта исследования естественного спутника Земли. Они должны были выводиться на орбиту четырехступенчатой ракетой-носителем 8К78 (Молния), которая могла доставить к Луне 1.5-тонные станции.
Аппарат Е-6 должен был осуществить мягкую посадку на Луну. Аппарат Е-7 предназначался для выхода на орбиту искусственного спутника Луны, откуда он мог бы транслировать телевизионные изображения поверхности. В 1960 был уже готов эскизный проект обоих аппаратов.
Однако уже в первый год проработки проектов выяснилось, что проще создать одну унифицированную платформу и для осуществления мягкой посадки, и для вывода станции на орбиту искусственного спутника Луны. Проект Е-7 был закрыт, зато в рамках проекта Е-6 появилось несколько модификаций.
Собственно станция Е-6 не совершила ни одной успешной "мягкой посадки на Луну. Все одиннадцать ее запусков с января 1963 года по декабрь 1965 года (среди них были Луна-4, Космос-60", Луна-5, -6, -7 и -8) закончились неудачами: то отказывал носитель, то - блок И (четвертая ступень), то - система управления станции. Последние две неудачи при попытке прилунения станций (Луна-7 и Луна-8.) произошли вследствие нерасчетной работы системы ориентации станций на этапе работы тормозной двигательной установки. Это происходило из-за слишком больших возмущений, вызванных наддувом амортизирующих баллонов лунной станции одновременно с работой ТДУ.
Справиться с этим смогли уже в КБ Машиностроительного завода (позже - НПО) имени С.А.Лавочкина (МЗЛ), куда была передана межпланетная тематика из ОКБ-1 в апреле-мае 1965 года. Наддув амортизирующих баллонов производился теперь до запуска ТДУ. Такая модификация аппарата получила обозначение Е-6М. Две станции этой серии были запущены в январе и декабре 1966 года (Луна-9 и Луна-13), успешно выполнили поставленную задачу, совершив мягкую посадку на Луну и выполнив исследования и съемку.
Аппарат Е-6С разрабатывался взамен аппарата Е-5 и предназначался для исследования Луны с орбиты ее искусственного спутника. Из двух запущенных в марте 1966 года аппаратов этой серии один остался на околоземной орбите (Космос-111), а второй выполнил задачу (Луна-10).
Следующей модификацией базового аппарата стала станция Е-6ЛФ. Она предназначалась для фотографирования Луны с орбиты ее искусственного спутника. В августе и октябре 1966 года были запущены две станции этой серии (Луна-11 и -12),
Последней модификацией Е-6 был аппарат Е-6ЛС, предназначенный для отработки элементов советской программы высадки космонавта на Луну Л-3. На станциях этого типа проводились также детальные исследования Луны с орбиты ее искусственного спутника. Из трех аппаратов этой серии в мае 1967 года, феврале и апреле 1968 года лишь последний (Луна-14) выполнил задачу.
Все эти модификации аппарата Е-6 начинали разрабатываться еще в ОКБ-1 и на разной стадии готовности в 1965 году были переданы в КБ Машиностроительного завода имени С.А.Лавочкина.
Последнюю станцию серии Е начали разрабатывать в ОКБ-1 в 1960 году. Станция Е-8 предназначалась для доставки на Луну подвижного исследовательского аппарата, управляемого с Земли. Самоходный аппарат быстро окрестили луноходом, как он в дальнейшем и назывался. Так как ракета 8К78 могла доставить на Луну максимум 100 кг, а в такую массу луноход "вписать" было тяжело. Поэтому в конце 1960 года было решено, что станция E-8 будет запускаться с помощью ракеты серии Н (конкретно - H-II, разработка которой началась в ОКБ-1 в том же году.
В заключении обзора станций серии Е стоит добавить, что на базе посадочной ступени КT,
созданной для аппарата Е-8, были разработаны еще две модификации:
- тяжелый искусственный спутник Луны Е-8ЛС, запускавшийся дважды в сентябре 1971 года (Луна-19) и в мае 1974 года (Луна-22);
-аппарат для доставки на Землю лунного грунта Е-8-5, из восьми запусков которого с июня 1969 по февраль 1972 года лишь две выполнили поставленную задачу (Луна-16 и -20). В начале 70-х годов была проведена модификация этого аппарата, получившего обозначение Е-8-5М. С октября 1974 по август 1976 года было запущено три станции Е-8-5, одна из которых (Луна-24) выполнила поставленную задачу.
Станции Е-8-5 и Е-8-5М были полностью разработаны в КБ МЗЛ под руководством Георгия Николаевича Бабакина, но получили старое, "королевское" обозначение.
2. Королёвский луноход
Небольшое, но необходимое отступление: В основу этой статьи легло интервью автора от 24 октября 1994 года с двумя известными "патриархами" отечественной космонавтики, работавшими над созданием луноходов - Олегом Генриховичем Ивановским и Гарри Николаевичем Роговским. О.Г.Ивановский в 1958-59 годах был ведущим конструктором по станциям серии Е в ОКБ-1, с 1965 - заместителем главного конструктора, а с 1971 по 1983 год - главным конструктором по лунной тематике НПО имени Лавочкина. Ныне он директор музея НПО имени С.А.Лавочкина. Г.Н.Роговский, работавший долгое время под началом Ивановского по лунной тематике, ныне является первым заместителем главного конструктора Научно-испытательного центра имени Г.Н.Бабакина.
Как же зародилась идея создания лунного самоходного аппарата? По словам Олега Генриховича Ивановского, идея эта была самой естественной. "От нее нельзя было уйти. Создание подвижного аппарата для исследования Луны на рубеже 50-х и 60-х годов было на кончике языка у всех. Прежде всего, даже не у инженеров, а у ученых, которые ставили перед собой задачи расширения лунных исследований."
А дальше уже решалась задача: как идти? Сложность решения этой задачи была в том, что надо было понимать, какие условия надо выбрать для движения аппарата. Но они не были известны! Вообще, перед первыми советскими межпланетными станциями зачастую ставились задачи, которые трудно было даже сформулировать в части проектных характеристик. То есть, надо было создать что-то, что должно работать в условиях, о которых мало что известно.
С начала 1960 года разработкой вопросов создания самоходного лунного аппарата и его мягкой посадки на Луну (тема Е-8) в ОКБ-1 занялся проектный отдел М.К.Тихонравова. Там и определялись основные проектные параметры лунохода. Массу аппарата ограничили 600 килограммами. Стоит заметить, что масса спускаемого аппарата станций типа Е-6, которая уже вовсю разрабатывалась в ОКБ-1, была 100 кг. Чтобы доставить на Луну такой тяжелый луноход требовалась ракета, более грузоподъемная чем 8К78 Молния. Поэтому в качестве носителя для Е-8 рассматривалась ракета H-II. Она должна была состоять из второй и третьей ступеней более мощной Н-1 и еще одной дополнительной третьей ступени. Такая ракета (по состоянию проекта ракет серии Н на 1961 год) должна была иметь стартовую массу 560 тонн и выводить на низкую околоземную орбиту порядка 16т. Использовать ракеты чужой разработки для своих аппаратов Королев не собирался.
Начались и проработки внешнего вида лунохода. Тут прежде всего надо было выбрать способ передвижения по лунной поверхности. А что из себя представляет лунная поверхность? В 1960 году этого точно не знал никто. Были гипотезы, что поверхность Луны - некая "хлябь", образованная 10-метровым слоем ничего не несущей лунной пыли (помните "Лунную пыль" Артура Кларка?). В связи с этим некоторые совсем некосмические предприятия выходили с множеством порой совсем фантастических предложений. Хотя их то, в общем то, легко было понять: людям хотелось приобщиться к интересной, экзотической задаче. Тут можно было застолбить за собой определенную веху.
- Я помню, как одна организация для отработки ходовой части лунохода предложила построить громадный ангар площадью несколько тысяч квадратных метров и всю эту площадь усыпать 5-10-метровым слоем нелущеного проса, - рассказывал О.Г.Ивановский. - Они считали, что нелущенное зернышко проса, очень скользкая за счет своей оболочки и не способная нести на себе никакой нагрузки, будет полным аналогом лунного грунта. Тогда были некоторые гипотезы, что лунная поверхность покрыта толстом слоем "скользкой" пыли. Но когда мы посчитали, во что это должно превратиться, и спросили: "Где набрать столько проса?", они предложили распахать новые специальные просяные поля. Мы посчитали более глубоко и отказались от этой идеи.
Чтобы разобраться с планетологическими проблемами, в 1961-62 годы Королев привлек к работе по теме Е-8 ряд организаций и ученых, занимавшихся Луной (горьковский Научно-исследовательский радиофизический институт, Астросовет АН СССР, Пулковскую главную обсерваторию, Крымскую астрофизическую обсерваторию. Большинство ученых сходились на том, что лунные пылевые моря - фантастика.
В конце концов проблему возможности мягкой посадки на Луну Сергей Павлович Королев решил приказным порядком. После его "Луну считать твердой" (относившейся, правда, к разработке аппарата Е-6), луноплавов больше никто не предлагал. Ограничивались привычными способами передвижения: на колесах, на гусеницах, на шнеках. Хотя были и более экзотические варианты: прыжками, шагами. Изо всех этих способов рассматривались прежде всего колеса и гусеницы. Чтобы сделать окончательный выбор, нужны были специалисты, которые могли бы, используя опыт создания земных машин, создать машину для работы на Луне. Королев имел и эту задачу ввиду. Он начал подыскивать те организации, которые могли бы работать в этом направление. Первоначально выбор пал на Научно исследовательский институт Госкомитета автотракторного и сельскохозяйственного машиностроения (НАТИ).
Работы в рамках темы Е Королев рассматривал в свете своих замыслов изучения Луны пилотируемыми средствами. 10 марта 1962 года он подписал эскизный проект комплекса Союз (7К-9К-11К), предназначенного для отработки сборки в космосе больших кораблей. С его помощью Королев собирался провести пилотируемый облет Луны. А буквально через месяц (13 апреля 1962 года) работы по носителям серии Н постановлением Правительства СССР были приостановлены. Предлагалось ограничиться лишь разработкой эскизного проекта ракеты, всесторонней оценкой вариантов и затрат на их реализацию. Это било и по луноходу.
Однако Королева так просто сломить было нельзя. Со 2 по 16 июля 1962 года он проводит защиту эскизного проекта ракеты H-I. Королев смог убедить руководство страны в необходимости лунной тематики. Уже 24 сентября 1962 года вышло постановление Совета Министров СССР по дальнейшему исследованию Луны. Им было закреплено решение провести высадку советского космонавта на Луну. В ее преддверии планировалось провести необходимые исследования с помощью автоматических аппаратов. Работы по серии носителей Н в ОКБ-1 возобновились.
Постепенно стала вырисовываться и тема Е-8. Для ускорения работ в 1963 году специалисты, занимавшиеся тематикой лунохода, были объединены в специальную группу, возглавленную М.К.Тихонравовым.
Но возникли с Е-8 и проблемы. Основная - с ходовой частью. В мае 1963 года НАТИ отказался работать над созданием шасси лунохода в связи с требованием ОКБ-1 уменьшить массу шасси со 120 до 85-100 кг.
Нового подрядчика по шасси помог найти министр оборонной промышленности Д.Ф.Устинов. Работы по созданию шасси лунохода были переданы в ленинградский ВНИИ-100 (позже ВНИИТрансМаш), разрабатывавший до этого ходовые части советских танков. Там нашелся хороший специалист и энтузиаст - Александр Кемурджиан, который в дальнейшем и создал ходовую часть лунохода. ВНИИТрансМаш был "озадачен" Королевым, но не в виде какой-то конкретной разработки, а в виде поисковых работ по способу передвижения по Луне.
Решать более конкретно было пока рано. В октябре 1963 года проектное задание по теме Е-8 было опять переработано. Это было вызвано пересмотром проекта ракет серии Н. Н-II по новому проекту могла выводить на низкую околоземную орбиту 20 т при стартовой массе 700 т. Луноходная группа в свою очередь выдала следующие основные технические требования: масса аппарата - 900 кг, диаметр приборного контейнера - 1800 мм, максимальная скорость передвижения по Луне - 4 км/час, предельное энергопотребление в течение 10 мин - 1 кВт, номинальное энергопотребление - 0.25 кВт.
3 августа 1964 года вышло постановление ЦК КПСС и Совета Министров СССР №655-268 "О работах по исследованию Луны и космического пространства", в соответствии с которым программе Н1-Л3 придавалось приоритетное значение. За Королевым закрепили тему по высадке космонавта на Луну. ОКБ-1 активизировало работы над ракетой Н-1. Тематика по облету Луны перешла в ОКБ-52. Для облета должна была использоваться ракета 8К82К (УР-500К), прототип которой разрабатывался в ОКБ-52 с 1960 года.
Рис. 1. Луноход, разработанный
по проектуЕ-8 в ОКБ-1. Рисунок из
журнала Земля и Вселенная №4, 1994. |
В свете постановления №655-268 были изменены основные задачи аппарата Е-8. Луноход предполагалось использовать для детального обследования предполагаемого района посадки пилотируемой лунной кабины с космонавтом. На базе аппарата Е-8 предполагалось создать искусственный спутник Луны Е-8ЛС для телесъемки с высоким разрешением предполагаемых районов посадки сначала лунохода, а потом и лунной кабины.
В конце 1964 года смежники ОКБ-1 по теме Е-8, и прежде всего ВНИИ-100, подтвердили возможность выполнения требований, заложенных в проекте. В ОКБ-1 началась работа над конкретным эскизным проектом. Он был разработан в начале 1965 года. Выбор был остановлен на гусеничном шасси (Рис. 1). (Подробно об этом проекте рассказано в журнале Земля и Вселенная №4, 1994).
Но утвердить его Королев так и не успел. ОКБ-1 было чрезмерно перегружено работами по многим космическим направлениям. Руководство отраслью приняло решение о передаче части работ в другие организации. Тематика по автоматическим межпланетным станциям предназначалась химкинскому Машиностроительному заводу имени С.А.Лавочкина. "Уход" АМС из ОКБ-1 в МЗЛ начался в апреле 1965 года. В конце апреля Королев еще настаивал на рассмотрении в ближайшее время эскизного проекта лунохода, но тема Е-8 так и была передана в мае в Химки без защиты проекта.
(окончание о следующем номере)
Новости космонавтики 1995 №24:
(Продолжение. Начало в "НК" №23, 1995 г.)
3. Рождение "лунного странника"
С передачей темы Е-8 на МЗЛ часть сотрудников ОКБ-1 также перешла на работу в Химки.
Тем временем в декабре 1965 года Королев разработал альтернативный вариант пилотируемого облета Луны (тема Л-1). В конце концов Совет Министров СССР утвердил "кооперативный" проект ОКБ-1 и ОКБ-52 по пилотируемому облету Луны комплексом УР-500 -Л-1. В ОКБ-1 работы по ракетам серии Н приостановились, кроме, естественно, H-1 Тем более ракета 8К82К, оснащенная разгонным блоком 11С824 (блок Д от ракеты 11А52 Н-1 по своим энергетическим характеристикам была точной копией Н-II. Но Н-II была лишь в чертежах, а 8К82К уже готовилась к летным испытаниям.
Поэтому в конце 1965 года проекты, разрабатывавшиеся ранее под ракету Н-II, были переориентированы на запуск ракетой 8К82К. В их числе был и луноход.
На основе обширного исследовательского материала, полученного из ОКБ-1 в КБ МЗЛ работа над луноходом шла достаточно быстро. Однако химкинцы решили не доводить до ума королевский проект Е-8, а разработали свой вариант. Тем более станция Е-6М № 13 (Луна-9) передала информацию о характеристиках лунного грунта, чего во время разработки лунохода в ОКБ-1 не было. Грунт оказался достаточно твердым, слой пыли - небольшим. Поэтому конструкторы пересмотрели проект шасси, отказавшись от гусениц в пользу восьми ведущих колес.
Рис. 2. Станция Е-8.
Рисунок из энциклопедии Космонавтика.
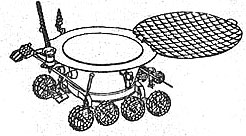
Рис. 3. Луноход 8ЕЛ №203. Рисунок из книги
Освоение космического пространства в СССР. 1971. |
Наконец осенью 1966 года переработанный эскизный проект лунохода был утвержден Георгием Николаевичем Бабакиным. Началась конструкторская проработка аппарата.
Тут стоит заметить, что индексом Е-8 обозначался весь комплекс, запускаемый ракетой 8К82К (Рис. 2). В него входили посадочная ступень КТ и собственно луноход 8ЕЛ.
Главной задачей для лунохода были определение физико-механических и химических параметров лунного грунта. На борту также имелась специальная аппаратура для изучения магнитных полей, аппаратура для телевизионной съемки и телефотометрической панорамной съемки. Все эти задачи и должны были решаться по ходу движения лунохода. Активная работа должна была продолжаться в течение 3 месяцев.
Помимо традиционных методов проектирования и создания космической техники, когда все КБ было включено в работу по тематике, Бабакин организовал специальную лабораторию, которая работала при КБ. Она занималась вопросами управления и логики этого аппарата.
Как рассказывал Гарри Николаевич Роговский, другим организационным мероприятием было то, что из числа работников эксплуатирующей организации (Министерство обороны СССР - К.Л.) был создан экипаж лунохода. Он отвечал за реализацию той логики, той идеологии управления, которая создавалась в лаборатории КБ. Там у них был водитель, бортинженер, штурман, оператор наведения остронаправленной антенны и, конечно, командир.
- Это была узко специализированная, хорошо дисциплинированная команда, - рассказывал Г.Н.Роговский. - Их специально отбирали. Они проходили медкомиссию почти такую же, как космонавты. Это были молодые здоровые ребята, у которых эмоции не превалировали над делом, нервы были в порядке.
- Ни одна земная специальность, которую можно было бы переучить для управления луноходом, не подходила, - добавил О.Г.Ивановский. - Никто, ни велосипедисты, ни мотоциклисты, ни автомобилисты, ни трактористы, ни танкисты не имели никаких преимуществ при выборе экипажа для управления таким комплексом. Поэтому выбрали военных, не имеющих никакого опыта управления транспортными средствами. Чтобы земной опыт не был довлеющим при работе с луноходом. Их просто готовили заново. Они все были в штате наземного командно-измерительного комплекса, работали на НИПах.
К концу 1967 года была полностью готова вся конструкторская документация по объекту Е-8. Сам аппарат 8ЕЛ (Рис. 3) весил 756 кг, имел длину с открытой крышкой солнечной батареи 4.42 м, ширину 2.15 м, высоту 1.92 м.
Прошло к этому времени отработку и шасси: сначала в ВНИИТрансМаш, а потом на МЗЛ. Масса шасси составила 84 кг, ВНИИТрансМаш вписался в отпущенный лимит. Диаметр каждого из восьми ведущих колес по грунтозацепам составлял 510 мм, ширина 200 мм. Колесная база была 170 мм, а ширина колеи 1600 мм. Для отработки методики управления луноходом в Крыму под Симферополем был создан специальный "лунодром". Тут то экипажи лунохода и смогли попрактиковаться в управлении аппаратом.
Для управления луноходом отобрали 11 офицеров (в порядке распределения по экипажам):
командиры - Николай Еременко, Игорь Федоров
водители - Габдухай Латыпов, Вячеслав Довгань
штурманы-навигаторы - Константин Давидовский, Викентий Самаль
бортинженеры - Леонид Мосензов, Альберт Кожевников
операторы остронаправленной антенны - Валерий Сапранов, Николай Козлитин
резервный водитель и оператор - Василий Чубукин.
Сразу скажу, что эта группа именно в таком составе была готова и к управлению Луноходом 1969-го года, управляла Луноходом-1 (1970 год) и Луноходом-2 (1973 год). Эти же офицеры должны были вести так и не стартовавший Луноход-3.
Успешно продвигались работы и над ступенью КТ. Она не только должна была использоваться для мягкого прилунения лунохода. Ступень стала базой для создания тяжелого спутника Луны в рамках программы E-8ЛC. А в начале 1967 года Г.Н.Бабакин предложил создать на базе КТ еще и станцию для доставки на Землю лунного грунта (программа Е-8-5).
Ступень КТ была, пожалуй, не менее важным элементом проекта Е-8, чем сам луноход. Ведь она должна была "в слепую" мягко сесть на Луну.
- Ведь когда садился лунный модуль Аполлона, человек мог вмешаться и скорректировать место прилунения, - рассказывал О.Г.Ивановский. - Мы такой возможности не имели. Наша посадка была "в темную". Это был минус нашего проекта.
Вся методика посадки была математически обоснована. В КБ МЗЛ имелась модель Луны с вероятностью распределения камней и кратеров. При расчете параметров ступени КГ конструкторы исходили из вероятности благополучного исхода мягкой посадки, обеспечивая положенное количество "девяток".
Хотя были в КБ даже проработки варианта посадки с выполнением маневров для выбора более оптимального места прилунения. Аппарат должен был садится по "картинке", сам выбирая место посадки. Но это оказалось в конце 60-х слишком сложной задачей.
Тем временем 4 февраля 1967 года вышло очередное постановление ЦК КПСС и Совета Министров СССР о работе над техникой по лунной программе. В нем был установлен график лунных экспедиций и полетов автоматических аппаратов, обеспечивающих их. Так как луноход шел теперь в одной упряжке с пилотируемым Л-3, то это постановление касалось и его.
В рамках первой советской пилотируемой лунной экспедиции луноходу отводилось немаловажное место. Он не только должен был детально обследовать предполагаемый район посадки, но и играть роль радиомаяка. Запас топлива в лунной кабине комплекса Л-3 был сильно ограничен, большие боковые маневры при выборе места посадки она выполнить не могла. Чтобы идти в заранее выбранное место и был нужен луноход. Предполагалось, что перед осуществлением высадки космонавта на Луну будут отправлены два лунохода для выбора основного и запасного района прилунения. В запасной район потом должна была сесть в автоматическом режиме резервная беспилотная лунная кабина ЛК-Р, Наконец в основном районе прилунилась бы лунная кабина с космонавтом. Основной режим посадки этой ЛК тоже был автоматический на радиомаяк лунохода. Космонавт, как и во всех других советских космических кораблях, был всего лишь пассажиром, который, правда, мог взять на себя управление в аварийной ситуации (подробно об этом варианте лунной экспедиции рассказано в "НК" №14, 1994, стр. 60-61).
Луноход планировалось использовать еще и для транспортировки космонавта по Луне к резервной ЛК, если бы основная кабина не смогла стартовать.
- Это были проработки, не дошедшие даже до уровня конструкторских работ, - рассказывал О.Г.Ивановский. - Были лишь эскизные прорисовки в период работы над проведением комплексной лунной экспедиции в составе комплекса Н1-Л3. Вообще проработки показали, что луноход можно было приспособить для передвижения космонавта по Луне. Но конкретных конструкторских проработок или экспериментов не было. Впереди лунохода предполагалось установить площадку, на которую космонавт мог встать, и управлять аппаратом, как на электрокаре. Для этого перед ним должен был быть пультик управления. Ехать можно было с той скоростью, с которой мог передвигаться луноход - 1.2 км/час.
Конкретных проработок не было потому, что высадка космонавта на Луну постоянно оставалась делом далекой перспективы. Но отработка лунохода, как управляемого с Земли лунного исследователя, шла на МЗЛ четко по графику.
Согласно постановлению от 4 февраля 1967 года, к летно-конструкторским испытаниям ракеты Н-1 планировалось приступить в сентябре 1967 года, первую посадку космонавта на Луну осуществить в третьем квартале 1968 года. В промежутке между этими датами аппарат Е-8 должен был быть полностью испытан. Реально ракета Н-1 впервые стартовала 21 февраля 1969 года. За два дня до этого была предпринята попытка запустить первый луноход.
4. Летать - так летать...
Прежде чем описывать запуски луноходов, стоит рассказать как в идеале должны были проходить их полеты. Комплекс Е-8 запускался с космодрома Байконур ракетой 8К82К. На 25 секунде полета (Т+25 сек) при высоте подъема 500 м заканчивался вертикальный участок траектории, начиналась отработка программы угла тангажа. В Т+125 сек происходило отделение первой ступени, в Т+200 сек - сброс головного обтекателя, в Т+375 сек - отделение второй ступени. Через 588 секунд после старта отключался двигатель третьей ступени и запускался двигатель 11Д58 разгонного блока 11С824. В Т+958 сек 11Д58 отключался и аппарат Е-8 с блоком Д выходил на круговую околоземную орбиту высотой 200 км и с наклонением 51.6°.
Через 35 минут после запуска раскрывалось посадочное устройство на ступени КТ, запускались 8 ЖРД малой тяги системы стабилизации. В Т+66 сек проводилась ориентация комплекса Е-8+11С824, запускались двигатели обеспечения запуска двигателя в невесомости. На 70 секунде полета двигатель 11Д58 блока Д запускался повторно. Отработав 400 секунд, он обеспечивал комплексу дополнительное приращение скорости 3170 м/сек и переводил станцию на траекторию полета к Луне. Через 12 секунд после выключения двигателя 11Д58, блок Д отделялся от станции Е-8.
В ходе перелета предусматривались две коррекции. Через 4 суток 7 часов после старта Е-8 с помощью двигательной установки ступени КТ выходила на окололунную орбиту с высотой 120 км и периодом обращения 2 часа. Через сутки должна была проводиться первая коррекция для снижения высоты перицентра над выбранной точкой посадки до высоты 20 км, а еще сутки спустя - вторая с целью подправить плоскость подхода аппарата к точке посадки.
Наконец в Т+7 сут 16 час запускалась тормозная двигательная установка. Она снижала скорость практически до 0 на высоте 2.3 км над поверхностью. До высоты 700 м станция опускалась с выключенным двигателем. Далее спуск шел с работающим двигателем до высоты 20 м, а затем основная ДУ ступени КТ отключалась, а запускался двигатель малой тяги. На высоте 1-2 метра двигатель отключался и станция совершала мягкую посадку. Весь спуск от начала торможения занимал примерно 6 минут.
После прилунения производилось раскрытие двух пар трапов. Телефотометры передавали панораму места посадки. Выбиралось направление съезда лунохода и намечался дальнейший маршрут на ближайшее время. Гарантийный срок активных передвижений лунохода по Луне определялся в 3 месяца.
Однако первой станции серии Е-8 ничего этого выполнить не удалось. 19 февраля 1969 года в 9 часов 48 минут стартовала ракета 8К82К с разгонным блоком 11С824 и аппаратом Е-8 №201. На 51.4 секунде полета ракеты разрушился головной обтекатель. Это произошло из-за ошибочных расчетов обтекателя на прочность. Запуск 19 февраля был первым полетом ракеты с этим новым обтекателем. Во время прохождения зоны максимального скоростного напора возникли аэродинамические вибрации, вследствие чего и произошло разрушение узлов крепления створок обтекателя. Обломки головного обтекателя, пролетев вдоль блока Д, третьей и второй ступеней, врезались в баки первой ступени, пробив их оболочку. В результате произошел контакт самовоспламеняющихся компонентов топлива, завершившийся эффектным взрывом на 53-й секунде полета, полностью разрушившем ракету. О радиоактивном заражении местности элементами изотопного источника обогрева лунохода в районе падения обломков станции Е-8 №201 ничего не известно.
далее 1971-1980