Карфидов В. «Космонавтика», 2021 г.
1.18. Проект «MoonRise»
Этот проект предусматривал запуск двух АМС для осуществления мягкой посадки в районе южного полюса Луны (Бассейн Эйткена). Каждая из АМС должна была собрать и доставить на Землю около килограмма лунного грунта. Предполагавшийся срок запуска - 2010-2011 год.
«MoonRise» - один из двух проектов, выбранных NASA в 2004 году для углубленной проработки по теме «New Frontiers». В июле 2005 года NASA объявила об окончательном выборе в пользу проекта АМС «Juno» для исследования Юпитера. Проект «MoonRise», таким образом, был отклонен, но затем повторно выдвинут для рассмотрения в 2009-2010 годах, но снова был отвергнут, на этот раз в пользу проекта доставки астероидного грунта «Osiris-REx».
1.19. Программа «Robotic Lunar Exploration Program»
В соответствии с объявленной в 2003 году Президентом США Дж.Бушем-младшим стратегией изучения и освоения космического пространства, NASA разработала и приняла программу изучения Луны автоматическими средствами «Robotic Lunar Exploration Program». Первой миссией этой программы стала разработка АМС «Lunar Reconnaissance Orbiter». Вторая миссия предусматривала запуск АМС для осуществления мягкой посадки на поверхность Луны.
1.19.1. АМС «Lunar Reconnaissance Orbiter»
АМС «Lunar Reconnaissance Orbiter» (LRO) разрабатывалась, как первоочередной шаг в долговременной программе «Возвращения на Луну». Основные задачи, возлагаемые на АМС:
- выбор, картографирование и изучение мест для будущих пилотируемых посадок;
- поиск полезных ископаемых и ресурсов, в первую очередь - водяного льда;
- изучение радиационной обстановки в окрестностях Луны.
Научная аппаратура АМС «Lunar Reconnaissance Orbiter»:
- LROC (Lunar Reconnaissance Orbiter Camera) - блок из двух телевизионных камер, узкоугольная камера NAC с разрешением 0,5 м и широкоугольная с разрешением до 100 м;
- LOLA (Lunar Orbiter Laser Altimeter) - лазерный альтиметр;
- LEND (Lunar Exploration Neutron Detector) - нейтронный детектор для поиска льда и изучения радиационной обстановки;
- DLRE (Diviner Lunar Radiometer Experiment) - радиометр для составления карты тепловых полей поверхности Луны;
- LAMP (Lyman-Alpha Mapping Project) - оборудование для картирования поверхности Луны в ультрафиолетовом диапазоне;
- CRaTER (Cosmic Ray Telescope for the Effects of Radiation) - оборудование для исследования радиационного фона;
- Mini-RF (Miniature Radio Frequency Technology Demonstration) - радар с синтезированием апертуры для поиска залежей льда в постоянно затененных районах.
АМС «LRO» оборудована двумя парами ЖРД маневрирования тягой по 9,1 кгс и двумя блоками ЖРД ориентации по четыре двигателя тягой 2,3 кгс в блоке. Электропитание аппаратуры обеспечивается одной солнечной батареей размером 4,37 х 3,20 м и литий-ионной аккумуляторной батареей емкостью 80А ч. Масса АМС при старте - 1 916 кг, в т.ч. 898 кг гидразина.
Запуск АМС «Lunar Reconnaissance Orbiter» был выполнен 18.06.09 г. ракетой-носителем Atlas V. На траекторию полета к Луне были выведены АМС «LRO» и сцепка из верхней ступени РН (Centaur) и зонда «LCROSS».
23.06.09 г. АМС «LRO» вышла на орбиту ИСЛ высотой 220 х 3 100 км и наклонением 30 град. После нескольких коррекций АМС 26.06.09 г. была выведена на круговую околополярную орбиту высотой 200 км. На следующий день, 27.06.09 г., АМС была переведена на рабочую орбиту 31 х 199 км с наклонением 90,2 град. Расчетный срок работы АМС «Lunar Reconnaissance Orbiter» по основной программе - 1 год.
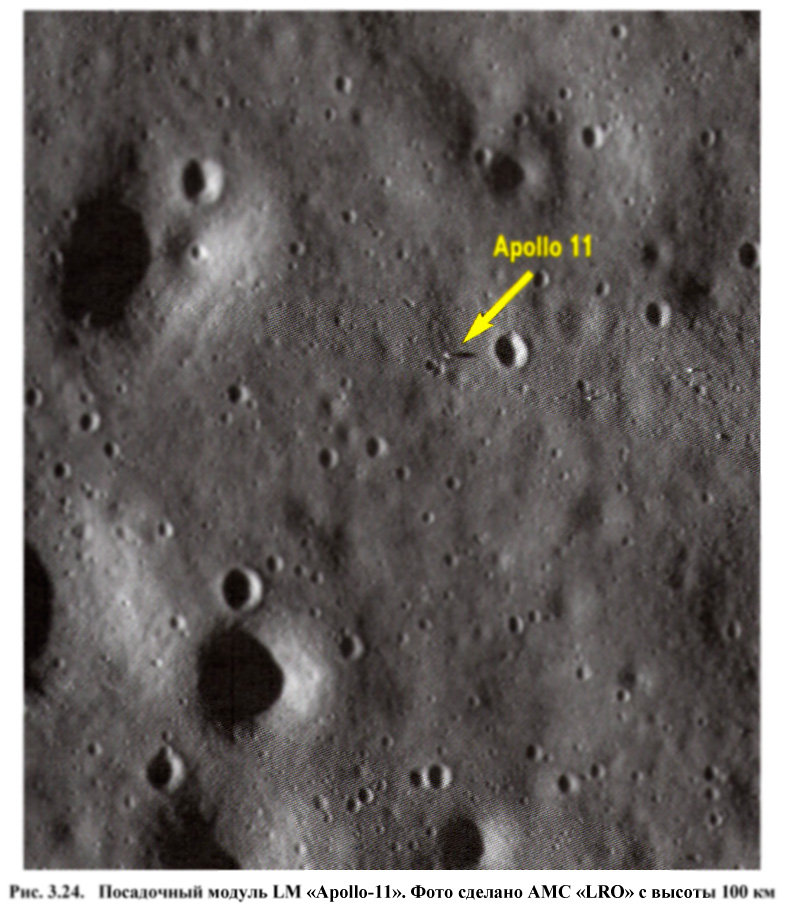
В период с 11.07.09 г. по 15.07.09 г. АМС «Lunar Reconnaissance Orbiter» провела съемку районов посадки американских экспедиций «Apollo». Были сфотографированы все посадочные ступени лунных кораблей LM, оставшиеся на поверхности Луны. Съемка выполнялась с временной орбиты высотой около 100 км, поэтому разрешение на снимках равно 1,0-1,4 м/пикс.
 1.19.2. Зонд «LCROSS»
1.19.2. Зонд «LCROSS»
10.01.06 г. NASA объявила конкурс по программе Robotic Lunar Exploration Program на дополнительную миссию в рамках проекта «LRO». На конкурс было подано 19 предложений, из которых было выбрано 4 для дальнейшего рассмотрения. Два предложения предусматривали ударное зондирование Луны, в двух других предлагалось доставить микроспутник на орбиту вокруг Луны и малый прыгающий робот на ее поверхность.
10.04.06 NASA сообщила, что по результатам конкурса принято решение ввести в состав АМС «LRO» зонд «LCROSS» (Lunar CRater Observation and Sensing Satellite - Спутник для наблюдения и зондирования лунных кратеров). Увеличение массы АМС было обеспечено решением использовать вместо РН Delta II более мощную РН Atlas V.
Рассматривалась возможность запуска вместе с «LRO» и «LCROSS» небольшой АМС (масса 60 кг) разработки Исследовательского центра им. Эймса для посадки на поверхность Луны.
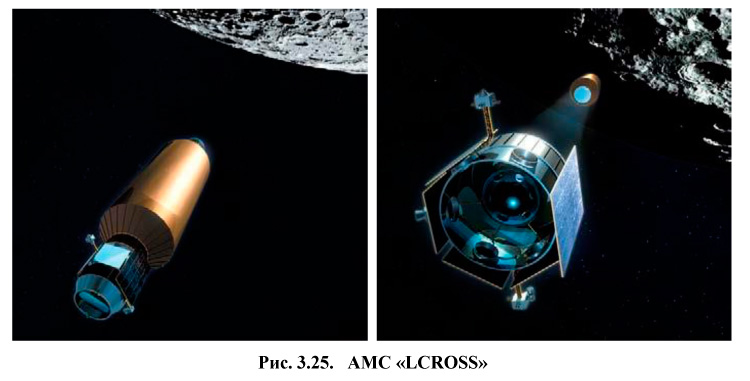
Зонд «LCROSS» разработан компанией Northrop Grumman, научная аппаратура для него - Исследовательским центром им. Эймса. В состав аппаратуры входят цветная и несколько инфракрасных камер, спектрометры и высокоскоростной фотометр.
Конструктивно зонд «LCROSS» представлял собой короткую цилиндрическую оболочку без днищ, со сферическим топливным баком в середине. По периметру оболочки закреплены панели с оборудованием. Зонд имеет два ЖРД тягой по 2,27 кгс для маневрирования и восемь ЖРД тягой по 0,45 кгс для ориентации и стабилизации. Зонд оснащен фиксированной панелью солнечной батареи и литий-ионным аккумулятором емкостью 40 А ч. Масса зонда «LCROSS» - 896 кг, в том числе 310 кг - запас топлива (гидразина) и сжатого азота.
Задача «LCROSS» - ударное зондирование южнополярной области на предмет наличия водяного льда на дне постоянно затененных кратеров. Идея проекта заключается в одновременном запуске одной РН на близкие орбиты АМС «Lunar Reconnaissance Orbiter» и зонда «LCROSS», не отделенного от верхней ступени РН. После запуска АМС «LRO» и «LCROSS» должны быть выведены на разные орбиты - «LRO» выводится на орбиту ИСЛ, а «LCROSS» - на высокоэллиптическую орбиту ИСЗ, обеспечивающую периодическое сближение с Луной. Через три месяца «LCROSS» будет направлен в район южного полюса Луны с одновременным разделением верхней ступени РН и зонда «LCROSS». По расчетам, после соударения верхней ступени РН с Луной должен был произойти выброс лунного вещества в размере около 1 000 т на высоту до 60 км. Зонд «LCROSS» должен пройти через этот выброс, выполнив анализ состава выброшенного вещества, после чего также должен упасть на Луну.
Сцепка «LCROSS» + Centaur была выведена на околоземную орбиту с высотой апогея 348 640 км. 23.06.09 г. сцепка прошла на расстоянии 3 200 км от поверхности Луны и, после гравитационного маневра в поле тяготения Луны, вышла на орбиту ИСЗ с высотой 357 000 х 582 000 км и наклонением 80 к плоскости эклиптики. По этой орбите сцепка совершила три полных витка с прохождением апоцентра 10.07.09 г., 16.08.09 г. и 22.09.09 г.
На третьем витке из-за нештатной работы бортовой аппаратуры, сцепка перешла в режим вращения вокруг продольной оси с большим расходом топлива. После устранения аварийной ситуации из 200 кг топлива осталось только 50 кг. Тем не менее, топлива было достаточно для проведения коррекций траектории для попадания в выбранную точку Луны.
На очередном витке, 09.10.09 г., орбита сцепки пересекла поверхность Луны в районе южного полюса. За 9 ч 40 мин до соударения зонд «LCROSS» отделился от ступени Centaur и с помощью бортовых ЖРД снизил скорость, чтобы несколько отстать от ступени. Зонд врезался в Луну на четыре минуты позже ступени Centaur, масса которой составляла более 2 т. Скорость при соударении составила около 2,5 км/с. Аппаратура зонда вела непрерывную съемку и наблюдение места падения ступени Centaur. К удивлению специалистов, ожидавшейся яркой вспышки и многокилометрового выброса грунта увидеть не удалось. Тем не менее, полученные результаты подтвердили наличие воды в выбранной точке Луны.
Координаты падения ступени Centaur: 84,675 ю.ш., 38,725 з.д. Координаты падения зонда «LCROSS»: 84,729 ю.ш., 38,36 з.д.
 1.20. КА «ARTEMIS»
1.20. КА «ARTEMIS»
17.02.07 г. одной РН Delta II было запущено пять однотипных ИСЗ «THEMIS», назначением которых являлось изучение взаимодействия Солнца и земной магнитосферы. Спутники получили обозначения «THEMIS A»
1, «THEMIS B» и т.д. до «THEMIS E» Масса каждого ИСЗ - 126 кг, в т.ч. 49 кг - масса топлива. ДУ спутника обеспечивает возможность приращения характеристической скорости до 900 м/с. Начальная орбита всех спутников составляла 437 х 87 348 км. После завершения программы было решено два из пяти ИСЗ использовать для исследования окололунного пространства.
ИСЗ «THEMIS B» к ноябрю 2007 г. находился на орбите с апогеем 197 000 км и периодом обращения 4 суток. Начиная с 01.08.09 г. ИСЗ по командам с Земли провел ряд маневров, в результате которых апогей был поднят до орбиты Луны. 08.12.09 г. «THEMIS B» выполнил гравитационный маневр около Луны, пролетев около нее на высоте 16 101 км. Гравитационные маневры были повторены 31.01.10 г. и 13.02.10 г. В итоге КА «THEMIS B» 25.08.10 г. достиг точки либрации L2 системы Земля-Луна. Эта точка расположена в 65 000 км за Луной. В соответствии с новыми задачами ИСЗ «THEMIS B» был переименован в КА «ARTEMIS P1» (Acceleration, Reconnection, Turbulence and Electrodynamics of Moon Interaction with the Sun, Probe 1 - Ускорение, перестроение, турбулентность и электродинамика взаимодействия Луны с Солнцем, Зонд 1). 09.01.11 г. КА «ARTEMIS P1» обогнул Луну и перешел в точку либрации L1, которая находится на расстоянии 58 000 км от Луны в направлении к Земле. Начиная с 22.06.11 г. КА выполнил еще три маневра и перешел на траекторию полета к Луне. 27.06.11 г. было выполнено торможение КА для перевода на орбиту спутника Луны с наклонением 173 град. и высотой апоселения 26 000 км.
КА «THEMIS C» к ноябрю 2007 г. находился на орбите ИСЗ c периодом обращения 2 суток. Маневры по переводу к Луне были начаты 21.07.09 г. После гравитационного маневра около Луны, который был произведен 28.03.10 г., КА «THEMIS C» 22.10.10 г. достиг точки либрации L1 системы Земля-Луна. Аналогично первому аппарату, ИСЗ «THEMIS C» был переименован в КА «ARTEMIS P2». 18.07.11 г. КА «ARTEMIS P2» был выведен на окололунную орбиту с наклонением 13,5 град. и высотой апоселения 29 300 км. Вскоре КА «ARTEMIS P2» был переведен на орбиту, аналогичную орбите КА «ARTEMIS P1», но с противоположным направлением движения.
Планировалось, что КА «ARTEMIS P1» и «ARTEMIS P2» проработают в течение 7-10 лет на окололунных орбитах с минимальной высотой от 20 до 400 км.
1 По другим данным - от «THEMIS P1» до «THEMIS P5».
1.21. АМС «GRAIL»
Проект «GRAIL» («Gravity Recovery And Interior Laboratory») был выбран в рамках конкурса Discovery в 2007 году.
Задача проекта - высокоточное гравитационное картирование Луны.
Две идентичные АМС «GRAIL-A» и «GRAIL-B» были выведены на полярную окололунную орбиту высотой 55 км. Была использована схема выведения через окрестности точки либрации L1 системы Земля-Солнце. Время перелета при такой схеме составило около трех с половиной месяцев вместо трех суток при прямом выведении на орбиту спутника Луны, но зато величина потребного тормозного импульса для выхода на орбиту составила 190 м/с вместо 800 м/с.
Корпус АМС «GRAIL» имеет прямоугольную форму. Размеры корпуса - 1,09 х 0,95 х 0,76 м, стартовая масса - 307 кг, в т.ч. 106 кг гидразина и гелия. АМС имеет две панели солнечных батарей площадью по 1,88 м
2. Двигательная установка состоит из однокомпонентного гидразинового двигателя тягой 2,2 кгс и восьми двигателей ориентации, тягой по 0,09 кгс. В ходе всего полета система ориентации поддерживает трехосную стабилизацию АМС.
Старт выполнен 10.09.11 г., обе АМС запущены одной РН Delta II. АМС «GRAIL-A» 01.01.12 года вышла на начальную окололунную орбиту высотой 90х8 363 км. АМС «GRAIL-B» вышла на орбиту спутника Луны 02.01.12 г.
В январе 2012 года по результатам конкурса, проведенного среди американских школьников и студентов, АМС получили имена собственные: «GRAIL-A» стал называться «Ebb» («Прилив»), «GRAIL-B» - «Flow» («Отлив»).
К началу марта 2012 года орбиты были скорректированы таким образом, что АМС двигались на расстоянии 175-225 км друг от друга по орбитам, близким к круговым со средней высотой 60 км. Под действием гравитационного поля, меняющегося в зависимости от рельефа и подповерхностных концентраций массы, относительное положение одной АМС относительно второй изменялось, эти изменения регистрировались с помощью использования радиодальномерной аппаратуры высокой точности.
Завершение работ по основной программе планировалось 29.05.12 г., до лунного затмения 04.06.12 г., т.к. предполагалось, что заряда аккумуляторов не хватит на работу во время пребывания в тени при отсутствии солнечного света. Однако, опасения оказались напрасны, и с конца августа работа была возобновлена. Для дополнительного этапа работы орбиты АМС понизили до 23 км.
Результатом работы АМС стала карта гравитационного поля Луны, наиболее подробная и имеющая самое высокое разрешение. Новая карта содержит такие элементы, которые никогда до этого не фигурировали на гравиметрических картах - тектонические структуры, вулканические ландшафты, кольца и кратеры.
К 25.11.12 г. все научные эксперименты с АМС «GRAIL» были завершены. 14.12.12 г. был выполнен управляемый сход обеих АМС с орбиты, которые врезались в склон горы недалеко от северного полюса, в точке с координатами 75,62 с.ш., 26.63 в.д., с интервалом в 30 секунд.
1.22. Программа «LunarQuest»
В 2009 году NASA приняла программу «LunarQuest» по исследованию Луны с помощью АМС. В программу были включены проект АМС «LADEE», уже существовавший на тот момент, для исследования окололунной среды с орбиты ИСЛ и проект создания двух посадочных АМС для работы в Международной лунной сети ILN. АМС «LADEE» была создана и запущена к Луне, а разработка посадочных АМС была отложена на неопределенное время.
1.22.1. АМС «LADEE»
АМС «LADEE» (Lunar Athmosphere and Dust Environment Explorer) предназначен для исследования следов лунной атмосферы и пылевой обстановки в лунных окрестностях. АМС планировалось (по состоянию на 2008 г.) запустить в 2011 г. совместно с двумя АМС «GRAIL», но к планируемому сроку АМС «LADEE» была не готова, и ее запуск был перенесен на 2013 год.
АМС «LADEE» была разработана Центром Эймса NASA.
АМС имела форму восьмиугольной призмы высотой 2,37 м и диаметром 1,85 м. Масса АМС - 383 кг, в т.ч. 49,6 кг - научная аппаратура и 134,8 кг - топливо (монометилгидразин и окись азота). Двигательная установка включает основной ЖРД тягой 45,4 кгс и четыре ЖРД ориентации, тягой по 2,72 кгс. Солнечные батареи размещены на внешней поверхности корпуса. Вырабатываемая батареями мощность - 295 Вт. Резервным источником энергии является литий-ионная батарея емкостью 24 А.ч.
Состав научной аппаратуры:
- UVS (Ultraviolet and Visible Light Spectrometer) - спектрометр ультрафиолетового и видимого диапазона;
- NMS (Neutral Mass Spectrometer) - масс-спектрометр нейтральных атомов;
- LDEX (Lunar Dust EXperiment) - пылевой масс-анализатор;
- LLCD (Lunar Laser Communication Demonstration) - экспериментальный лазерный передатчик.
Запуск АМС «LADEE» был произведен 07.09.13 г. ракетой-носителем Minotaur V.
Выведение АМС к Луне выполнялось по схеме постепенного поднятия апогея. Сначала АМС была выведена на эллиптическую орбиту ИСЗ, затем 13.09.13 г. и 21.09.13 г. при прохождении перигея были выданы разгонные импульсы для поднятия апогея.
01.10.13 г. АМС в третий раз прошла перигей по орбите высотой 1 450 х 375 800 км.
05.10.13 г. АМС вошла в сферу притяжения Луны и 06.10.13 г. после выдачи тормозного импульса АМС вышла на экваториальную окололунную орбиту с обратным направлением вращения и высотой 590 х 15 700 км.
09.10.13 г. орбита была понижена до высоты 235 х 2 220 км с периодом 4 ч 01 мин.
13.10.13 г. АМС была переведена на рабочую орбиту 235 х 250 км.
21.11.13 года АМС была выведена на рабочую орбиту 20 х 60 км с наклонением 157,5 град. Научная фаза работы АМС была рассчитана на 100 суток.
В апреле 2014 года NASA сообщила, что научная программа работы АМС выполнена полностью, и АМС будет сведена с орбиты спутника Луны. Орбита была понижена до высоты 2-3 км, а 17.04.14 г. произошло естественное столкновение АМС с поверхностью Луны. Падение произошло на невидимой стороне Луны, поэтому точное время и координаты места падения остались неизвестными.
1.25. Проект «Lunette»
В 2010 году JPL разрабатывала проект «Lunette», рассчитывая выдвинуть его на конкурс NASA по программе «Discovery». Проект предусматривал запуск на одной РН трех одинаковых АМС, которые, после некоторого ожидания в точке Лагранжа (системы Земля-Луна), должны совершить мягкую посадку в трех разнесенных точках поверхности Луны.
АМС оснащаются высокочувствительными сейсмометрами, заглубляемыми в грунт датчиками тепловых потоков, уголковыми отражателями и другими научными приборами. Энергопитание аппаратуры будет обеспечиваться солнечными элементами и аккумуляторами. На период лунной ночи основная часть электроники АМС должна отключаться. Масса АМС - около 100 кг, в т.ч. масса научной аппаратуры - 12 кг. Расчетный срок работы АМС на поверхности Луны - около 2 лет.
Карфидов В. «Космонавтика», 2021 г.
6.1. Исследования Луны
6.1.1. Проект «Moon Rabbit»
В середине 2002 года в китайской печати появлялись сообщения о планах запуска к Луне небольшой АМС, названной «Moon Rabbit» («Лунный кролик»).
Конструктивно АМС должна была состоять из двух модулей - орбитальный (ОМ) и посадочный (ПМ).
Орбитальный модуль создавался на базе научного ИСЗ «Double Star». На ОМ планировалось установить двухкомпонентный ЖРД для орбитальных маневров. Научное оборудование ОМ:
- телекамеры с ПЗС-матрицами видимого и инфракрасного диапазонов;
- радиолокационный высотомер;
- радиометр.
Посадочный модуль должен был оснащаться РДТТ для схода с орбиты и выполнения мягкой посадки. Из оборудования на ПМ предполагалось установить только телекамеру и устройство для развертывания китайского флага площадью 60 м
2, который должен был быть виден в телескоп с Земли.
Схема полета АМС «Moon Rabbit» выглядела следующим образом. АМС выводится на орбиту ИСЗ, переходную к геостационарной, откуда с помощью своей ДУ АМС переходит на траекторию полета к Луне. При подлете к Луне АМС повторно включает ДУ для выхода на орбиту ИСЛ высотой 100-200 км. На окололунной орбите происходит разделение ОМ и ПМ, после чего ПМ совершает посадку на поверхность Луны.
Общая масса АМС - 330 кг.
Проект не был реализован в связи с разработкой и принятием долгосрочной программы исследования Луны «Чанъэ». Вероятно, проект «Moon Rabbit» являлся частью проработок, выполненных на этапе формирования программы «Чанъэ».
6.1.2. Программа «Чанъэ»
В марте 2003 года в китайских СМИ был опубликован долгосрочный план исследования Луны автоматическими станциями. План назывался «Проект Чанъэ» (Chang'e)
1.
1 Имя «Чанъэ» взято из китайской мифологии - так звали девушку, которая выпила эликсир бессмертия, принадлежавший ее мужу, богатырю, и вознеслась на небо. С тех пор Чанъэ живет в лунном дворце вместе с нефритовым зайцем, который под деревом гуйхуа круглый год толчет в ступе волшебное снадобье «черный иней».
Проект состоял из трех этапов:
- вывод АМС на окололунную орбиту для составления детальной трехмерной карты лунной поверхности, дистанционного анализа химсостава грунта, измерения плотности почвы и мониторинга окружающей среды;
- посадка на Луну дистанционно управляемых самоходных АМС для разведки местности, сбора и анализа образцов грунта;
- посадка на Луну АМС с возвратной ракетой, обеспечивающей доставку на Землю собранных образцов лунного грунта.
Все три этапа должны быть выполнены до середины 2020-х годов. Фактически выполнение всех задач программы было завершено полетом АМС «Чанъэ 5» в декабре 2020 года.
23.01.04 г. Госсовет Китая утвердил первый этап этого плана.
6.1.3. Этап I
6.1.3.1. АМС «Чанъэ 1»
АМС «Чанъэ 1» (Chang'e 1) стала первой китайской автоматической станцией из серии АМС, предназначенных для исследования Луны.
Основное назначение АМС - отработка технологий для будущих космических аппаратов и изучение окололунного пространства, а также лунной поверхности.
АМС разработана на базе конструкции стационарного спутника связи DFH-3. Размеры основного блока АМС 2,2 х 1,72 х 2,0 м, размах солнечных батарей 18,1 м. АМС оснащена бортовой ДУ тягой 50 кгс.
Масса АМС около 2 350 кг, в т.ч. 1 200 кг топлива, 130,4 кг научного оборудования.
В состав научной аппаратуры входят:
- стереокамеры для съемки лунной поверхности с разрешением до 100 м (с рабочей орбиты);
- лазерный высотомер для точного измерения расстояния до лунной поверхности;
- гамма-лучевой/рентгеновский спектрометр для исследования состава пород;
- микроволновый радиометр для измерения толщин реголита;
- система мониторинга солнечного ветра и физического состояния окололунного пространства.
Расчетная длительность работы - 1 год.
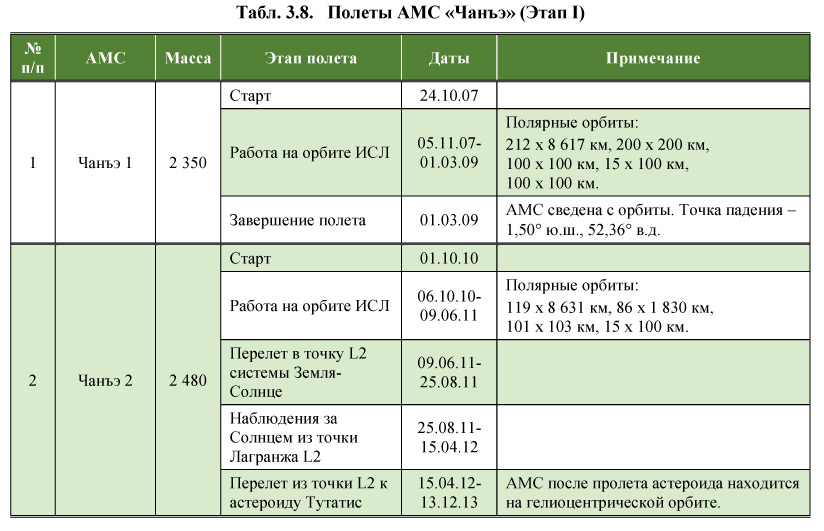
Запуск АМС «Чанъэ 1» ракетой-носителем CZ-3A (Чанчжэн-3А) состоялся 24.10.07 г. АМС была выведена на околоземную орбиту высотой 205 x 50 930 км, с которой путем трех последовательных включений ДУ была переведена на траекторию полета к Луне. 05.11.07 г. АМС была успешно выведена на полярную орбиту ИСЛ высотой 212 х 8 617 км, после чего началось формирование круговой рабочей орбиты высотой 200 км.
С 20.11.07 г. по 12.05.08 г. АМС выполнила полную съемку поверхности Луны, к 01.07.08 г. была также проведена съемка полярных районов. На основании полученных данных была составлена полная стереокарта поверхности Луны.
После завершения заявленного срока работы на орбите ИСЛ - 1 год, - в связи с хорошим состоянием аппаратуры АМС было решено выполнить ряд экспериментальных работ, в том числе снижение орбиты до высоты 100 км и съемку поверхности с разрешением 65 м. 18.12.08 г. периселений орбиты был снижен до 15 км, что, вероятно, являлось отработкой элементов мягкой посадки. 20.12.08 г. АМС была возвращена на круговую орбиту высотой 100 км.
01.03.09 г. работа с АМС «Чанъэ 1» была завершена. По команде с Земли АМС была сведена с орбиты и упала на поверхность Луны в точке с координатами 1,50 ю.ш., 52,36 в.д.
6.1.3.2. АМС «Чанъэ 2»
Для постройки АМС «Чанъэ 2» был использован технологический экземпляр «Чанъэ 1», переоборудованный и дооснащенный. В частности, была установлена телекамера с более высоким разрешением, чем на АМС «Чанъэ 1», - до 7 м с высоты 100 км и до 1 м с орбиты высотой 15 км.
Размеры корпуса АМС - 2,2 х 1,72 х2,0 м. Размах панелей солнечных батарей - 18,1 м. АМС оснащена бортовой ДУ тягой 50 кг и 12 ЖРД ориентации, объединенных в два контура.
Состав научной аппаратуры:
- стереокамера TDI-CCD;
- лазерный высотомер для построения детальной трехмерной карты поверхности Луны;
- гамма-спектрометр GRS;
- флуоресцентный рентгеновский спектрометр XRS;
- микроволновый радиометр MRM;
- детектор солнечных энергичных частиц HPD;
- детектор ионов солнечного ветра SWID.
Масса научных приборов - 140 кг. Стартовая масса АМС - 2 480 кг, в т.ч. 1 310 кг топлива. Расчетное время работы на орбите Луны - шесть месяцев.
АМС «Чанъэ 2» была запущена 01.10.10 г. по более быстрой траектории перелета к Луне, благодаря чему длительность перелета составила 5 суток вместо 12 суток у АМС «Чанъэ 1». АМС благополучно выполнила программу работ на орбите Луны, отсняв район предполагаемой посадки АМС следующего этапа в Океане Бурь с разрешением 1,0-1,3 м с периселения орбиты 15 х 100 км.
После завершения фотосъемки поверхности Луны были предприняты сверхплановые эксперименты с АМС «Чанъэ 2». Так, 09.06.11 г двигательная установка АМС была снова включена, переведя АМС на траекторию полета к точке Лагранжа L2 системы Земля-Солнце (1,5 млн. км от Земли в сторону от Солнца), куда АМС «Чанъэ 2» и прибыла 25.08.11 г.
(продолжение)
 6.1.4. Этап II
6.1.4. Этап II
Второй этап лунной программы Китая (ранее назывался «Чанъэ II») предусматривал доставку на Луну двух луноходов с помощью посадочных АМС «Чанъэ 3» и «Чанъэ 4». Правительство Китая одобрило второй этап программы 15.02.08 г.
 6.1.4.1. АМС «Чанъэ 3»
6.1.4.1. АМС «Чанъэ 3»
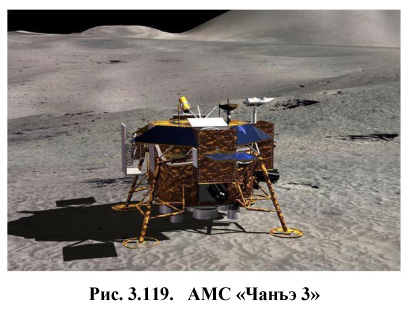
АМС «Чанъэ 3» представляет собой платформу для осуществления мягкой посадки на Луну и доставки полезного груза. Корпус АМС выполнен в виде восьмигранной призмы, с четырьмя широкими и четырьмя узкими гранями. Размер корпуса по широким граням - 2,5 м, высота корпуса - около 1,4 м. Просвет между корпусом и грунтом составляет (на ровной поверхности) 0,83 м. Максимальный диаметр АМС - 3,65 м, высота - 3,435 м. Четырехопорное шасси АМС имеет диаметр по центрам опор 4,76 м.
На нижней грани корпуса установлен посадочный ЖРД, имеющий переменную тягу от 153 кгс до 765 кгс. Блоки двигателей ориентации и стабилизации, размещенные на узких боковых гранях корпуса, включают 16 ЖРД тягой по 15,3 кгс и 8 ЖРД тягой по 1,0 кгс.
Система посадочной навигации обеспечивает посадку АМС на Луну с вертикальной скоростью не более 3,8 м/с и с горизонтальной скоростью не более 1,0 м/с. Отклонение продольной оси АМС от местной вертикали при касании не более 3°.
АМС «Чанъэ 3» впервые в мире оснащена системой автоматического анализа рельефа в зоне посадки и уклонения от препятствий. При спуске АМС зависает на высоте около 100 м, и лазерная сканирующая система за 0,25 с выполняет замеры расстояний до 200 000 точек лунной поверхности в поле зрения 30°х30° с точностью лучше 5 см. По полученным данным бортовой компьютер строит трехмерную модель поверхности и определяет место для безопасной посадки, исключая зоны с уклоном более 8° и места с наличием камней крупнее 20 см.
Основной полезной нагрузкой АМС «Чанъэ 3» являлся луноход «Юйту» с аппарелями для его схода на грунт. Луноход в перелетном состоянии закреплен на боковой грани корпуса АМС. Кроме того, на борту АМС было установлено следующее оборудование:
- десантная телекамера LCAM, предназначенная для обеспечения посадки. Выполняет съемку на высотах от 4 км до 4 м с частотой до 10 кадров в секунду на матрицу 1024 х 1024 пикс. При посадке было получено 4 673 снимка;
- топографическая камера TCAM для детальной съемки района посадки. Позволяет выполнять съемку в пределах 340° по азимуту и 120° по высоте с качеством 4 Мпикс. Может выполнять видеосъемку с частотой 10 кадров в секунду. За первый лунный день камерой было передано 342 снимка;
- LUT - лунный ультрафиолетовый телескоп для астрономических наблюдений в ультрафиолетовом диапазоне;
- EUV - камера крайнего ультрафиолетового диапазона для наблюдений за ионосферой и плазмосферой Земли;
- ловушка для накопления лунной пыли и изучения ее свойств.
Стартовая масса АМС «Чанъэ 3» составила 3 780 кг, в том числе около 2 500 кг - запас топлива, 200 кг - масса полезного груза. Запуск АМС производился ракетой-носителем CZ-3B.
По состоянию на 2007 год сроком запуска «Чанъэ 3» назывался 2012 г., к 2010 году этот срок сместился на 2013 г. Фактически запуск АМС «Чаньэ 3» с луноходом «Юйту» произведен 01.12.13 г.
АМС вышла на окололунную орбиту 06.12.13 г. Посадка на Луну выполнена 14.12.13 г. Координаты посадки: 44,1214° с.ш. 19,5117° з.д., в 395 км от места посадки советской АМС «Луна-17», доставившей на Луну в ноябре 1970 года «Луноход-1».
После схода на грунт доставленного лунохода «Юйту» аппаратура посадочной ступени АМС «Чанъэ 3» продолжала сбор информации и передачу ее на Землю. Радиокомплекс посадочной ступени выполнял функции транслятора для лунохода «Юйту». Топографическая камера вышла из строя в результате воздействия низких температур во время первой лунной ночи. Остальная аппаратура продолжала исправно работать, как минимум, до октября 2014 года.
6.1.4.1.1. Луноход «Юйту»
Автоматическая лунная станция «Юйту» («Нефритовый заяц») была доставлена на Луну 14.12.13 г. посадочной АМС «Чанъэ 3».
Корпус лунохода выполнен в виде параллелепипеда, нижняя половина которого занята служебной аппаратурой, а в верхнюю убирается на ночь штанга с телекамерами. В верхнем отсеке установлены также звездные датчики, а на боковых ребрах корпуса закреплены откидывающиеся панели солнечных батарей, которые закрывают на ночь корпус с убранной мачтой с телекамерами. На мачте закреплены навигационная и панорамной стереокамеры, остронаправленная и три всенаправленные антенны, работающие в разных диапазонах. На передней панели корпуса установлены две телекамеры обнаружения препятствий, лазерная матрица подсветки пути и некоторые другие приборы. В нижней части передней панели находится узел крепления манипулятора, несущего датчик рентгеновского спектрометра.
Длина «Юйту» 1,5 м ширина без учета солнечных батарей - 1 м, высота с мачтой и телекамерами - 1,1 м. Луноход имеет шестиколесное шасси, диаметр колес - 30 см, ширина обода - 15 см.

Масса лунохода - 140 кг, в т.ч. масса научной аппаратуры около 20 кг. Предполагалось, что луноход сможет преодолеть путь около 10 км, удаляясь от посадочной ступени на расстояние не более 3 км. Луноход оснащен компьютером с сиcтемой автоматического обхода препятствий. Движение выполняется со скоростью 200 м/ч «шагами» по 7 м. Расчетный срок работы АЛС - от 3 до 12 месяцев.
В состав научного оборудования АЛС «Юйту» входят:
- PCAM - две панорамных камеры с возможностью съемки в пределах 360° по азимуту и 90° по высоте и фокусированием от 3 м до бесконечности. Размер кадра 2 352 х 1 728 пикс. Панорамными камерами к июню 2014 года было сделано 698 снимков.;
- GPM - подповерхностный радар для зондирования лунной коры;
- VNIS - видовой инфракрасный спектрометр для регистрации спектра лунных пород и определения их минерального состава;
- APXS - альфа-рентгеновский спектрометр для определения элементного состава образцов грунта. Датчик спектрометра расположен на манипуляторе.
Энергопитание аппаратуры обеспечивается двумя панелями солнечных батарей и двумя радиоизотопными источниками энергии российского производства мощностью по 120 Вт. Тепло, выделяемое радиоизотопными источниками, используется в системе терморегулирования для сохранения работоспособности аппаратуры лунной ночью.
Пройдя за первый лунный день 115 м, «Юйту» приготовился к «ночевке» расчетным образом. После первой ночи, длившейся с 26.12.13 г. по 11.01.14 г., «пробуждение» лунохода произошло нормально, но, как позже выяснилось, возникли проблемы с управлением механизмами. В результате, за второй лунный день «Юйту» прошел всего около 40 м. В конце второго лунного дня не удалось сложить мачту с телекамерами и закрыть верхний отсек корпуса. Позже было сообщено, что возникла неисправность в ходовой части, из-за чего луноход не только потерял возможность продолжать движение, но и не смог принять положение, необходимое для обеспечения нужного температурного режима во время лунной ночи. В результате после 15.01.14 г., «Юйту» потерял возможность двигаться и продолжал работу, как стационарная АЛС.
03.08.16 г. было сообщено, что работа с луноходом «Юйту» прекращена.
Карфидов В. «Космонавтика», 2021 г.
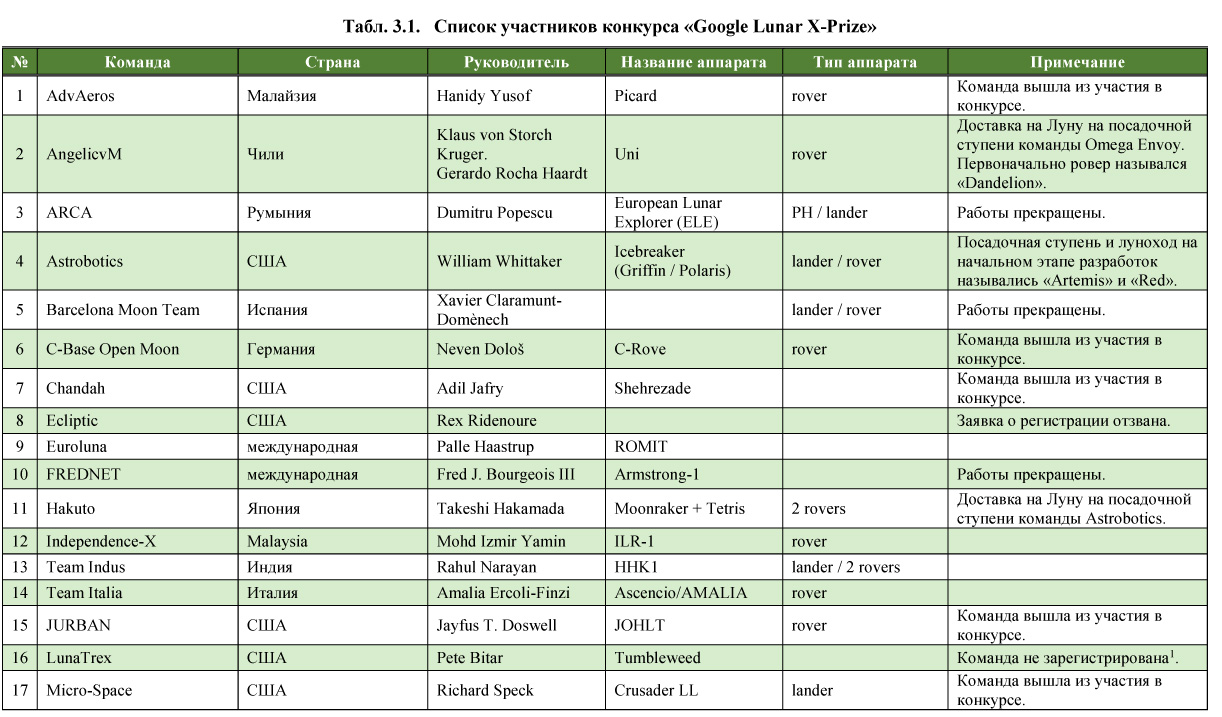
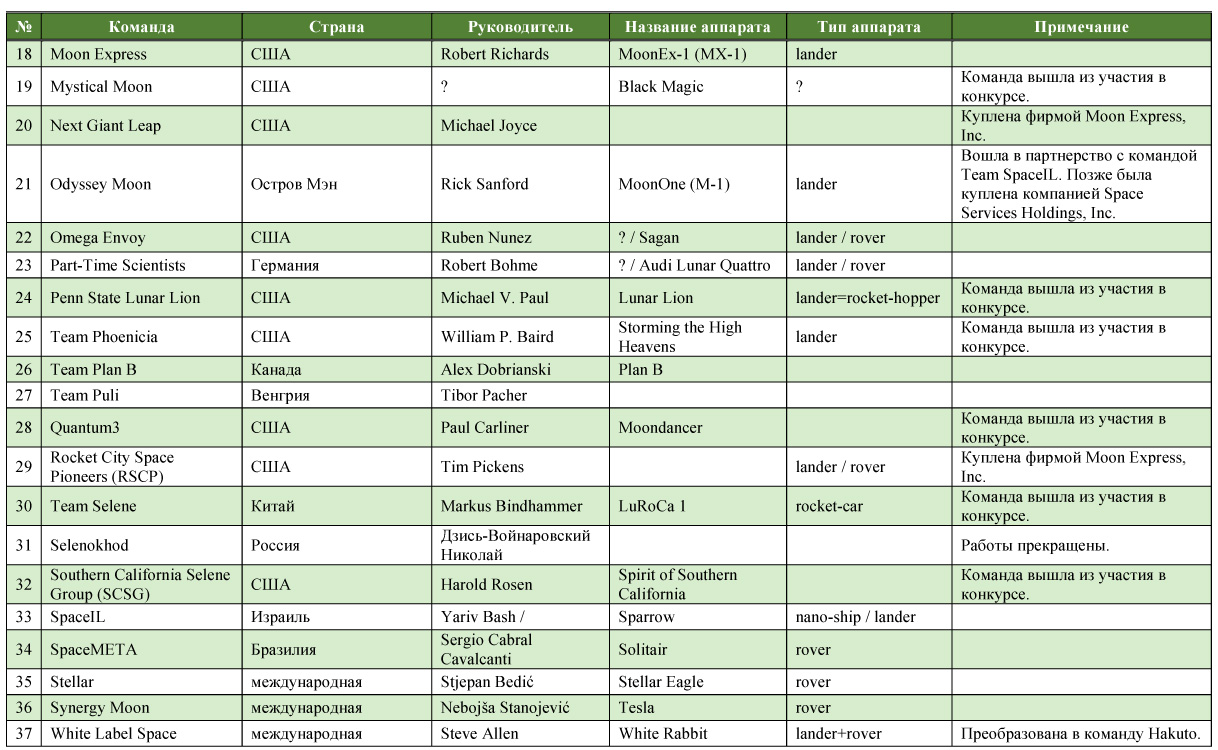
Конкурс «Google Lunar X-Prize»
13 сентября 2007 года фонд «X PRIZE» объявил об организации конкурса под названием «Google Lunar X-Prize» (иногда использовалось также название «Moon 2.0») с призовым фондом 30 млн. долларов США. Участники конкурса должны успешно и мягко посадить на поверхность Луны космический аппарат, созданный при частном финансировании. Этот аппарат должен пройти по лунной поверхности не менее 500 метров и вести видеотрансляцию с высоким разрешением в онлайн-режиме. Победитель, первым выполнивший указанные условия до 31.12.2012 года, получит 20 млн. долларов. Если же доставка лунохода произойдет позже, но до 31.12.2014 года, то победитель получит лишь 15 млн. долларов. Если и к этому сроку ни один участник не добьется победы, конкурс может быть закрыт. Последний срок подачи заявок на участие в конкурсе - 31.12.10 г.
Была предусмотрена возможность приза 5 млн. долларов для команды, доставившей АМС на Луну второй, а также дополнительные призы общей суммой 5 млн. долларов за отдельные достижения - таких, как прохождение более длинной дистанции (более 5 000 метров), фотографирование земных артефактов (например, американские и советские АМС, LEM «Apollo»), обнаружение воды в виде льда, пребывание на Луне в течение лунной ночи.
Всего заявки на участие в конкурсе подавали 37 команд, однако, часть из них выбыла из соревнования еще до истечения сроков регистрации.
Так, команде LunaTrex было отказано в регистрации из-за нерешенного спора о правообладателе названия «LunaTrex».
Команда Ecliptic отозвала заявку о регистрации.
Команда White Label Space перерегистрировалась под названием Hakuto.
Команды Next Giant Leap и Rocket City Space Pioneers были куплены компанией Moon Express, Inc. и вошли, таким образом, в состав команды Moon Express.
Команда Odyssey Moon скооперировалась с командой SpaceIl, а в дальнейшем была куплена компанией Space Serveces Holdings, Inc.
На момент закрытия регистрации - 31.12.2010 г., - в списке оставалось 29 участников. Общий список команд приводится в табл. 3.1.
В 2010 году срок завершения конкурса был сдвинут до 31.12.2015 года.
В конце 2012 года условия конкурса снова были откорректированы. Организаторы конкурса сообщили, что первый приз может быть уменьшен до 15 млн. долларов, если до этого посадку выполнит американская АМС, созданная по программе NASA.
Штат Флорида объявил, что если старт будет произведен с его территории, то участник конкурса, выполнивший этот старт, дополнительно получит 2 млн. долларов.
Очередное продление конкурса состоялось в конце 2014 года, когда стало ясно, что ни одна из команд не в состоянии успеть к назначенному сроку. Сначала срок конкурса был продлен до конца 2016 года. В мае 2015 года организаторы конкурса объявили, что если до конца года хотя бы одна из команд предъявит подписанный контракт о запуске, которым разработанный КА должен быть отправлен к Луне, то срок конкурса будет продлен до конца 2017 года. Две команды - Moon Express и Team SpaceIL заключили такие контракты во второй половине 2015 года. После 31.12.16 г. из участия в конкурсе будут исключены команды, не заключившие к этому моменту аналогичные контракты.
За период, прошедший с момента объявления конкурса, часть команд отказалась от участия, либо не найдя нужных источников финансирования, либо убедившись в своей неспособности выполнить условия конкурса. На сентябрь 2015 года в списке команд осталось 16 участников.
В 2016 году компания Astrobotic Technology заявила о своем выходе из конкурса в связи с ориентаций на коммерческую деятельность.
25.01.2017 г. были объявлены пять команд-финалистов: SpaceIL, Moon Express, Synergy Moon, Team Indus и Hakuto. Все они должны были отправить свои АМС к Луне не позднее 31.12.2017 г.
Промежуточные призы
В ноябре 2013 года организаторы конкурса ввели дополнительные условия, определившие возможность получить призы за промежуточные результаты, показанные на Земле:
- 1 млн. долларов (3 приза) - за демонстрацию конструкции и программного обеспечения, позволяющих, в принципе, выполнить мягкую посадку на Луну (Landing);
- 500 тыс. долларов (4 приза) - за демонстрацию устройства, позволяющего выполнить перемещение по поверхности Луны после посадки на расстояние не менее 500 м (Mobility);
- 250 тыс. долларов (4 приза) - за разработку аппаратуры, обеспечивающей передачу высококачественных изображений с поверхности Луны (Imaging).
В феврале 2014 года жюри определило пять команд, которые могут претендовать на указанные промежуточные призы:
- Astrobotic (США): Landing + Mobility + Imaging;
- Moon Express (США): Landing + Mobility + Imaging;
- Team Indus (Индия): Landing + Imaging;
- Part-Time Scientists (Германия): Mobility + Imaging.
- Hakuto (Япония): Mobility;
Названные команды должны были до конца 2014 года продемонстрировать свои достижения, что не у всех получилось в полном объеме.
Присуждение промежуточных призов состоялось в феврале 2015 года. Призы получили команды:
- Astrobotic (США): 1 750 тыс. долларов (Landing + Mobility + Imaging);
- Moon Express (США): 1 250 тыс. долларов (Landing + Imaging);
- Team Indus (Индия): 1 000 тыс. долларов (Landing);
- Part-Time Scientists (Германия): 750 тыс. долларов (Mobility + Imaging);
- Hakuto (Япония): 500 тыс. долларов (Mobility);
Завершение конкурса
Когда стало ясно, что до 31.12.2017 г. ни одна из команд не будет в состоянии выполнить доставку АМС на Луну, организаторы конкурса сделали последнюю попытку спасти частную лунную АМС. Срок был продлен до 31.03.2018 года. Однако, уже 23.01.2018 года основатель XPRIZE Питер Диамандис заявил о закрытии конкурса, так как стало ясно, что ни одна из команд до 31 марта 2018 года не сможет сделать попытку отправить свою АМС к Луне
 1.1. AdvAeros (Advanced Aerospace Industries)
1.1. AdvAeros (Advanced Aerospace Industries)
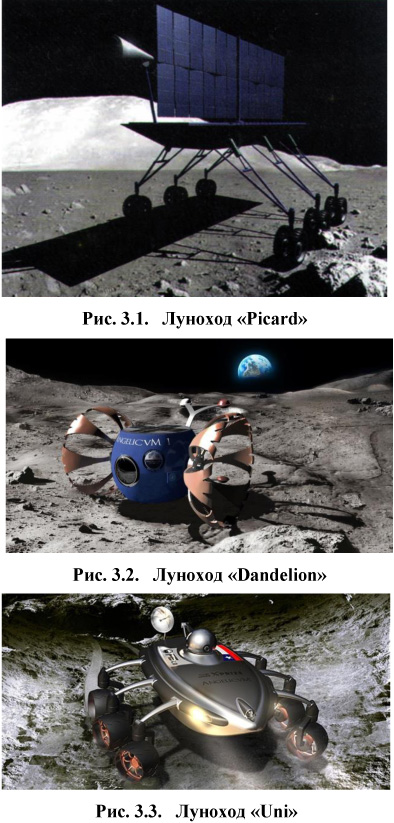
Небольшая малайзийская компания AdvАeros (Advanced Aerospace Industries), возглавляемая бизнесменом Ханиди Юсофом (Hanidy Yusof), участвуя в конкурсе «Google Lunar X-Prize», объявила своей целью сконструировать и построить как лунный самоходный аппарат «Picard», так и ракету-носитель для его доставки на Луну.
Компания планировала производить запуск РН с плавучей платформы. Компоненты топлива - кислород и водород должны были производиться непосредственно на платформе путем электролиза воды. Электроэнергию для электролиза должны были вырабатывать солнечные батареи. Рассматривался вариант предварительного подъема РН на аэростате.
Конструктивных подробностей перелетного блока, посадочной ступени и лунохода не публиковалось. Предполагаемый вид лунохода «Picard» показан на рис. 3.1.
В ноябре 2010 года компания вышла из конкурса.
1.2. AngelicvM
Команду AngelicvM из Чили возглавляет Жерардо Роча Хаардт (Gerardo Rocha Haardt), президент компании Inversiones Angelicvm Ltd. AngelicvM участвует в конкурсе «Google Lunar X-Prize» с 2010 года.
Первый проект лунохода, разработанный к 2012 году, назывался «Dandelion» («Одуванчик»).
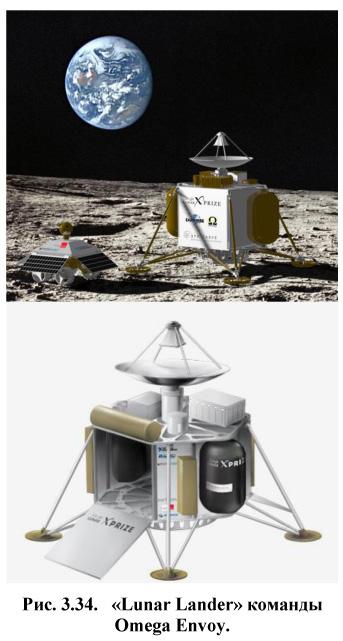
В конце 2012 года между AngelicvM и Earthrise Space, Inc. (ESI) было достигнуто соглашение об одновременной доставке на посадочном модуле ESI двух луноходов - «Sagan» и «Dandelion». Компания ESI для участия в конкурсе зарегистрировала команду «Omega Envoy» и разрабатывает как собственный луноход «Sagan», так и посадочный модуль.
Вскоре после этого AngelicvM переработала проект лунохода. Новый проект лунохода получил наименование «Uni» (сокращение от Unity - единство). Масса лунохода около 5 кг.
В октябре 2015 года Жерардо Хаардт сообщил, что достигнуто соглашение о доставке лунохода «Uni» на Луну на посадочном модуле «Griffin» компании Astrobotic Technology Inc., одновременно с луноходом компании Astrobotic и двумя роверами японской команды Hakuto. Несмотря на то, что у компании Astrobotic еще не было подписанного контракта с компанией SpaceX об использовании РН Falcon 9, по мнению Жерардо Хаардта, шансы лунохода «Uni» попасть на Луну как можно раньше, на посадочном модуле «Griffin» предпочтительней, чем на любом другом.
 1.3. ARCA
1.3. ARCA
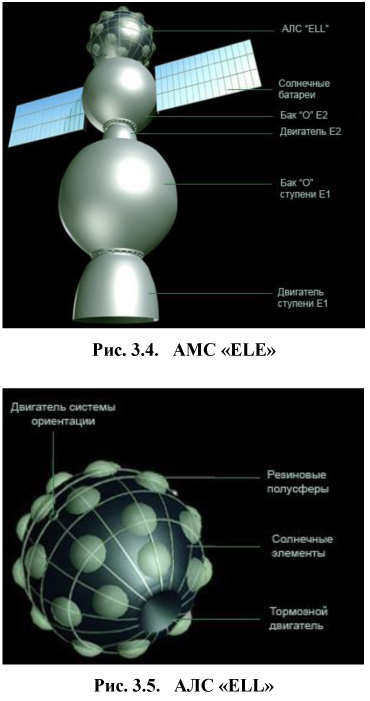
Для участия в конкурсе «Google Lunar X-Prize» компания ARCA (Румынская Ассоциация космонавтики и аэронавтики) в 2008 году выдвинула проект АМС «ELE» (European Lunar Explorer - Европейский лунный исследователь).
АМС «ELE» состоит из двухступенчатого разгонного блока и посадочного аппарата «ELL» (European Lunar Lander - Европейский лунный посадочный аппарат). При старте АМС находится под обтекателем.
Ступени разгонного блока E1 и E2 представляют собой сферические композитные емкости, внутри которых находится окислитель - 85% перекись водорода, - и корпуса ракетных двигателей с твердым топливом на основе битума или парафина.
В первоначальном проекте планировалось, что вывод АМС «ELE» на околоземную орбиту будет выполняться ракетой «Stabilo 1B», но затем было принято решение специально для проекта разработать РН Haas2, в связи с чем проект получил название «Haas/ELE»
Ступень E1 обеспечивает переход АМС с околоземной орбиты на траекторию полета к Луне, а ступень E2 - выход на окололунную орбиту. Тяга двигателя ступени E1 - 500 кгс, ступени E2 - 100 кгс. После окончания работы ступени отбрасываются. Во время перелета к Луне электропитание аппаратуры обеспечивают две панели солнечных батарей, установленные на ступени E2.
Автоматическая лунная станция «ELL» выполнена в виде сферического корпуса, покрытого солнечными элементами. В корпус вделаны резиновые полусферы небольшого диаметра, обеспечивающие амортизацию при касании поверхности Луны. Внутри корпуса размещены видеокамеры, навигационное оборудование, радиоаппаратура, а также тормозной однокомпонентный двигатель, работающий на перекиси водорода. Тяга двигателя - 14 кгс. Тормозной двигатель должен обеспечить мягкую посадку АЛС «ELL», для которой был выбран район недалеко от лунного хребта Карпаты.
После отказа от воздушного старта со стратостата и прекращения работ по РН Haas конструкторы компании ARCA некоторое время прорабатывали проект запуска РН Haas 2, несущей АМС «ELE», с ракетоплана IAR-111 «Excelsior». После отказа от дорогостоящего проекта ракетоплана компания ARCA вернулась к традиционной схеме наземного старта ракеты-носителя Haas 2c.
Способ перемещения АЛС «ELL» по поверхности Луны и размещение видеотелевизионной и передающей аппаратуры не раскрывается. Общая масса АМС «ELE» составляет 400 кг, в том числе АЛС «ELL» - 42 кг.
Компания ARCA вышла из конкурса «Google Lunar X-Prize» в 2014 году в связи с реорганизацией и переориентацией на другие задачи.
1.4. Astrobotic
Компания Astrobotic Technology Inc. (г. Питтсбург, США), организованная в 2008 году профессором университета Карнеги-Меллон Уильямом Уайттэкером (William «Red
1» Whittaker), разрабатывала комплекс, состоящий из лунной посадочной станции и доставляемого на Луну груза.
1 Здесь: рыжий (англ.).
 1.4.1. «Artemis Lander» + «Red Rover».
1.4.1. «Artemis Lander» + «Red Rover».
Первоначальный проект комплекса включал посадочный модуль «Artemis Lander» и луноход «Red Rover», показанные на рис. 3.6 и 3.7.
1.4.2. «Griffin» + «Andy».
В феврале 2011 года компания объявила о переименовании разрабатываемых КА. Луноход, разрабатываемый Институтом роботехники питтсбургского университета, было решено назвать «Andy» в честь основателя университета Эндрю Карнеги (Andrew Carnegie) и его главного спонсора Эндрю Меллона (Andrew Mellon). Масса лунохода 33 кг, высота 1,03 м.
Посадочный модуль получил имя «Griffin» («Гриф»). Модуль рассчитан на доставку на Луну полезного груза массой до 270 кг. В качестве полезного груза могут быть луноходы, бурильные установки, комплексы оборудования для анализа грунта и другие. В каждом конкретном случае такие системы, как солнечные батареи, остронаправленные антенны, терморадиаторы и некоторые другие могут отличаться, в то время как основная конструкция, энергосистема, системы авионики, связи, навигации остаются неизменяемыми. Высота ступени «Griffin» 1,6 м, поперечный размер - 4,5 м. Двигательная установка состоит из четырех топливных баков, основного ЖРД и четырех блоков двигателей управления ориентацией.
Масса АМС на околоземной орбите - около 2 350 кг, в том числе 1 685 кг топлива. Запас характеристической скорости, обеспечиваемый двигательной установкой - 3 237 м/с.
По состоянию на апрель 2011 года в планах компании Astrobotic Technology было три запуска модуля «Griffin» к Луне: в декабре 2013 года, в июле 2015 года, и в 2016 году.
Первым запуском предполагалось доставить на Луну луноход «Andy» для выполнения условий конкурса «Google Lunar X-Prize», а также 110 кг дополнительной полезной нагрузки.
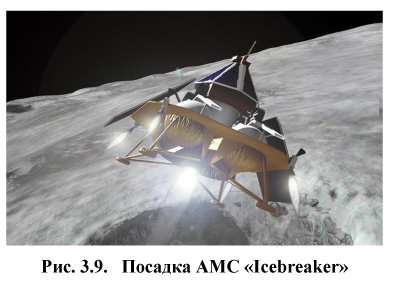
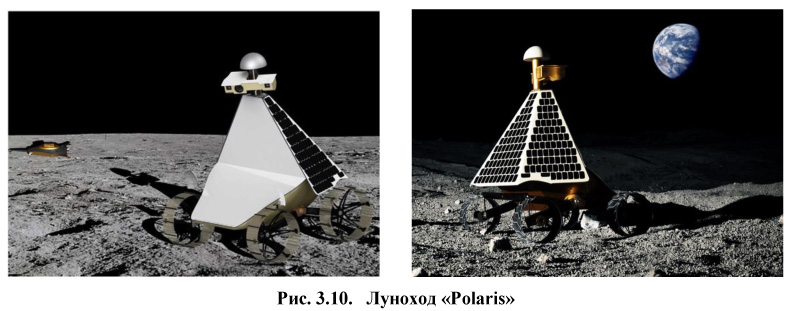
1.4.3. «Icebreaker» + «Polaris».
Второй запуск планировался сначала на июль, затем на октябрь 2015 года. Эта миссия была названа сначала «Polar Excavator» (Полярный экскаватор), а затем переименована в «Icebreaker» («Ледокол»). Посадка должна быть произведена в районе южного полюса. Основная задача АМС «Icebreaker» - обнаружение водяного льда. В качестве доставляемого груза для этой миссии был запланирован луноход «Polaris» с буровой установкой RESOLVE, разработанной по заказу NASA. Луноход, имеющий четырехколесное шасси, оборудован вертикальными панелями солнечных батарей, генерирующих мощность 250 Вт, и двумя радиаторами для отвода излишков тепла. В верхней части лунохода установлена стереокамера и лазерный дальномер, используемые для создания трехмерной модели лунной поверхности и прокладки маршрута движения. В состав полезной нагрузки лунохода, масса которой составляет 80 кг, входит буровое устройство для взятия образцов грунта и аппаратура для обнаружения воды во взятых образцах. «Polaris» имеет возможность выполнять движение в затененных зонах и производить бурение в автономном режиме. Рабочий период лунохода длится в течение 10 суток во время лунного дня, после чего «Polaris» переводится в спящий режим на время лунной ночи. С восходом Солнца работа лунохода продолжается. Все системы посадочной ступени и лунохода рассчитаны на сохранение работоспособности после 14 суток воздействия низких температур. Скорость движения лунохода - 30 см/с. Размеры: длина 2,4 м, ширина 1,7 м, высота 2,6 м. Масса лунохода (без полезного груза) - 150 кг. Еще 110 кг компания Astrobotic отводила для оборудования потенциальных заказчиков, опубликовав как технические требования к доставляемому грузу, так и расценки за доставку.
Третий из запланированных запусков намечался на 2016 год, при этом как состав груза, доставляемого на поверхность Луны, так и место посадки предоставлялось на выбор заказчика.
В октябре 2011 года Astrobotic сообщила о переносе первого полета разработанной АМС к Луне на конец 2014 - начало 2015 года, в связи с возможностями компании SpaceX по выделению компании Astrobotic РН Falcon 9. В мае 2012 года график снова был уточнен. Сообщалось, что первым будет произведен запуск АМС «Icebreaker» с луноходом «Polaris», срок запуска был смещен на октябрь 2015 года.
В феврале 2015 компании Astrobotic Technology Inc. и Ispace Technologies Inc. (Япония) заключили контракт, согласно которому на посадочном аппарате «Griffin» кроме лунохода «Polaris» на Луну будут доставлены также роверы «Moonraker» и «Tetris», разработанные командой Hakuto. Первым на поверхность Луны сойдет «Polaris», и только потом, через некоторое время, с посадочной ступени спустятся японские роверы.
В октябре 2015 года была достигнута договоренность, что этот же посадочный модуль доставит на Луну ровер «Uni» чилийской команды Team AngelicvM. Запуск планировалось осуществить в конце 2017 года.
В декабре 2016 года компания Astrobotic Technology заявила о своем выходе из конкурса в связи с переориентаций на коммерческую деятельность.
1.4.4. Пjhnatkm pfrfpjd Astrobotic
Компания Astrobotic Technology Inc. на конец 2015 года имела ряд заказов на доставку грузов на Луну:
- Team HAKUTO - доставка двух роверов в рамках конкурса «Google Lunar X-Prize»;
- Team AngelicvM - доставка ровера в рамках конкурса «Google Lunar X-Prize»;
- Agencia Espacial Mexicana (AEM) - доставка научных приборов;
- Elysium Space - доставка капсул с прахом умерших;
- Celestis Inc. - доставка порций праха умерших;
- Astroscale PTE. Ltd. - доставка капсулы «Lunar Dream» для рекламы популярного напитка;
- Lunar Mission Ltd. - доставка цифрового хранилища с фотографиями отпечатков ног всех желающих.
 1.5. Barselona Moon Team
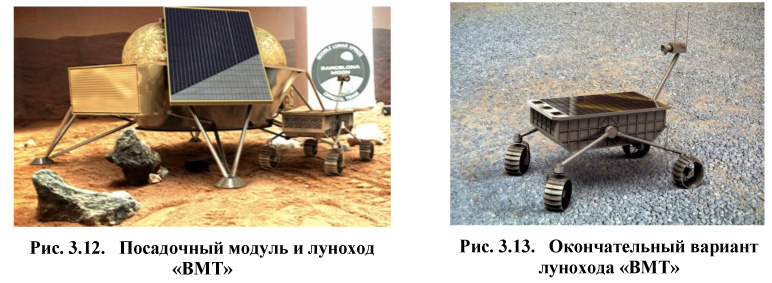
1.5. Barselona Moon Team
Испанская команда Barselona Moon Team (BMT), возглавляемая Ксавье Кларамунтом-Домеником (Xavier Claramunt-Domenech), поддерживается компанией Galactic Suite Design (Барселона, Испания). BMT разрабатывает лунный посадочный модуль и луноход. Луноход подвешивается к боковой грани посадочного модуля, а после посадки модуля отцепляется и свободно падает на поверхность Луны. Безопасность лунохода при этом обеспечивается малой силой тяжести на Луне и небольшой высотой падения.
Отправка комплекса на траекторию полета к Луне должна была быть выполнена китайской РН CZ-2C с дополнительной твердотопливной третьей ступенью. Выход на окололунную круговую орбиту высотой 100 км, последующий спуск и посадка обеспечиваются двигательной установкой посадочного модуля. Первоначально запуск намечался на июнь 2014 г., затем был перенесен на июнь 2015 г.
Для финансового обеспечения проекта компания Galactic Suite Design объявила прием заказов на коммерческую доставку грузов на Луну.
В 2015 году команда Barselona Moon Team была вынуждена отказаться от дальнейшего участия в конкурсе по финансовым причинам.
 1.6. C-base Open Moon
1.6. C-base Open Moon
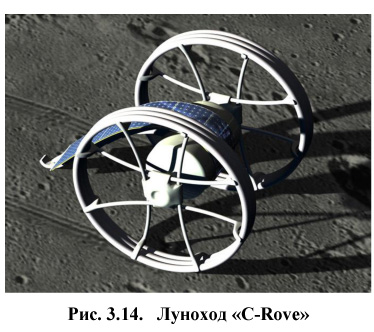
Германская команда C-base Open Moon разрабатывала простейший луноход «C-rove» для выполнения условий конкурса «Google Lunar X-Prize».
Этапы доставки лунохода - вывод на орбиту ИСЗ, перевод на траекторию полета к Луне, торможение и посадка, предполагалось реализовать путем покупки соответствующих услуг у частных компаний, которые владеют такими технологиями.
Команда C-base Open Moon сосредоточилась на проектировании собственно лунохода, способного преодолеть 500-метровый путь по поверхности Луны, провести фото- и видеосъемку с HD-качеством и передать полученные изображения на Землю. Для обеспечения передачи предполагалось использовать в качестве ретранслятора закупленный посадочный модуль.
Один из вариантов лунохода показан на рис. 3.14. Существовали также альтернативные варианты лунохода. После стадии проектирования команда прекратила участие в конкурсе.
1.7. Chandan
Команда Chandan
1, организатором которой являлся Адил Джефри (Adil Jafry), руководитель компании Chandah Space Technologies (Хьюстон, шт. Техас, США), подала заявку на конкурс «Google Lunar X-Prize» одной из первых. Адил Джефри планировал разработать луноход с названием «Shehrezada», но вскоре изменил планы и сообщил, что отказывается от участия в конкурсе.
1 Chandan - Луна (санскрит).
1.8. Ecliptic
Команду Ecliptic зарегистрировал в конце 2008 года Рекс Райденур (Rex Ridenoure), президент и основатель фирмы Ecliptic Enterprises Corp. После того, как Райденур был приглашен в команду Southern California Selene Group на пост заместителя руководителя проекта, он отозвал регистрацию команды Ecliptic из конкурса «Google Lunar X-Prize».
1.9. Euroluna
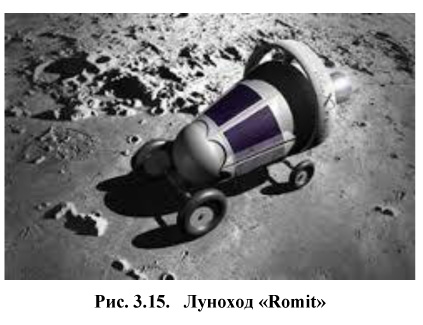
Euroluna (European Lunar Exploration Association) - международная команда, штаб-квартира которой находится в Дании, а участники команды проживают в Швейцарии и Италии. Возглавляет команду Палле Хааструп (Palle Haastrup).
Команда Euroluna разработала проект лунохода «Romit» массой 50 кг, который должен быть доставлен на Луну с помощью средств какой-либо другой частной компании на коммерческих условиях.
Для испытаний оборудования, которое планировалось использовать на луноходе, Euroluna разработала и изготовила спутник «MiniRomit-1», для запуска которого был заключен контракт с компанией InterOrbital Systems (IOS)1. Планировалось, что РН Neptun 30 фирмы IOS выведет «MiniRomit-1» на полярную орбиту ИСЗ высотой около 310 км в декабре 2010 года. По различным причинам запуск РН неоднократно откладывался и по состоянию на конец 2015 года так и не был осуществлен.
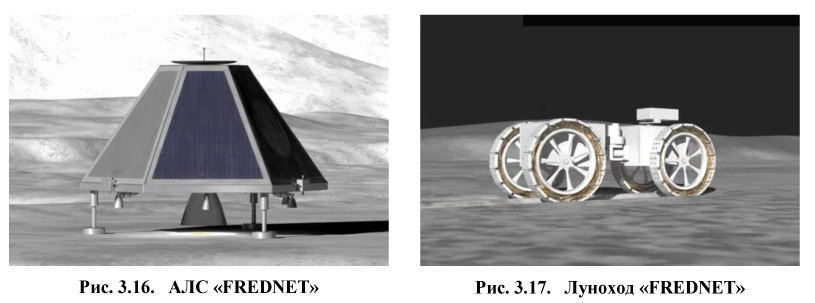
1.10. FREDNET
Международная команда FREDNET, организованная неформальным объединением The Open Space Society (Общество открытого космоса), возглавлялась Фредом Бурже третьим (Fred J. Bourgeois III).
Команда разработала проект посадочного аппарата, внутри которого на Луну доставляется луноход.
Проект не был доведен до этапа реализации, команда вышла из конкурса.
 1.11. Hakuto
1.11. Hakuto
В 2013 году команда White Label Space, участвующая в конкурсе «Google Lunar X-Prize», была переименована в команду Hakuto, руководителем команды стал Takeshi Hakamada. Одним из ключевых изменений в проекте стал отказ от разработки собственной посадочной ступени.
В феврале 2014 года командой был представлен проект комплекса «Dual Rover», состоящий из двух аппаратов: четырехколесного «Moonraker» и двухколесного «Tetris». Оба ровера должны быть доставлены на Луну одним посадочным аппаратом. Нормальное положение роверов - сцепка, где «Tetris» играет роль прицепа. Предусмотрена возможность раздельного движения роверов с использованием соединительного троса. Одним из возможных применений такой схемы указывалась возможность спуска на тросе ровера «Tetris» по отвесной стене в кратер или каверну, при этом «Moonraker» должен выполнять роль якоря, оставаясь наверху.
«Moonraker» имеет высоту 54 см, длину 60 см, ширину 48 см. Масса ровера - 8 кг. В корпусе ровера установлена видеокамера, которая с помощью зеркальной системы имеет возможность делать съемку панорам с полным круговым обзором.
Размеры ровера «Tetris»: высота 21 см, длина 54 см, ширина 27 см. Масса - 2 кг.
Роверы рассчитаны на функционирование круглые лунные сутки при температуре от +100 C и более днем, до -150 C и ниже - ночью.
В феврале 2015 года команда Hakuto договорилась с фирмой Astrobotic, что на посадочном аппарате «Griffin» фирмы Astrobotic Technology Inc. в миссии «Icebreaker» кроме лунохода «Polaris» будут также доставлены роверы «Moonraker» и «Tetris».
К концу 2015 года был разработан и изготовлен так называемый «предполетный» экземпляр лунохода. Конструкция ровера несколько отличалась от варианта «Moonraker». От присоединяемого двухколесного ровера «Tetris» было решено отказаться. Разработчики отказались также от поворотной телекамеры, установив четыре неподвижных камеры по серединам верхней грани корпуса. На верхней части корпуса было решено разместить солнечную батарею.

В августе 2016 года была представлена окончательная конструкция японского лунохода. Тогда же было заявлено, что запуск и доставка на Луну будет осуществлена в декабре 2017 года с помощью индийской РН PSLV1 и лунного посадочного аппарата HHK-12, разработанного командой Team Indus, также участвующей в конкурсе «Google Lunar X Prize».
21 января 2017 года команда «Hakuto» сообщила, что их луноход будет называться «Sorato».
После переноса срока окончания конкурса до 31 марта 2018 года запуск лунохода также был отложен на 2018 год.
После закрытия конкурса команда «Hakuto» была преобразована в компанию Ispace и продолжила работу над созданием лунных АМС.
 1.12. Independence-X
1.12. Independence-X
Команду Independence-X (Малайзия) возглавлял Мохд Измир Ямин (Mohd Izmir Yamin), основатель компании Independence-X Aerospace Sdn. Bhd.
Командой разработан проект лунохода «ILR-1» (Independence-X Lunar Rover-1), общий вид которого показан на рис. 3.21.
 1.13. Team Indus
1.13. Team Indus
Команду Team Indus (Нью-Дели, Индия) возглавляет Рауль Нарайян (Rahul Narayan).
Первичный проект выглядел следующим образом. РН PSLV выводит на высокоэллиптическую околоземную орбиту перелетно-посадочный модуль «HHK-1» (Hum Honge Kamiyab
1) массой около 900 кг. Модуль переходит на траекторию прямого перелета к Луне с помощью собственной ДУ и доставляет на Луну полезный груз 40 кг, в состав которого входят два ровера, общей массой 15 кг. Один из роверов предназначен для выполнения основных требований конкурса: выполнить передвижение на 500 м и вести в режиме реального времени телепередачу с высоким разрешением (формат HD). Второй ровер нацелен на выполнение дополнительных условий, за осуществление которых оргкомитет конкурса установил дополнительные призы, в частности, за прохождение более длинной дистанции (5 000 метров) или за сохранение работоспособности после лунной ночи.
В процессе разработки проект претерпел изменения. Масса модуля была снижена до 600 кг, из которых 404 кг составляет масса топлива. Модуль «HHK-1» выводится ракетой-носителем PSLV на орбиту ИСЗ высотой 880 х 71 000 км, после чего несколькими включениями ДУ в перигее переводится на траекторию перелета к Луне. Модуль выходит на окололунную орбиту с высотой апоселения 3 500 км, а через некоторое время переводится на круговую орбиту высотой около 100 км. После проверки систем высота переселения понижается до 12,6 км, и модуль выполняет мягкую посадку. Масса модуля после посадки - 210 кг, в том числе масса полезного груза - 20 кг. На Луну доставляется один мини-луноход массой 12 кг. Расчетная продолжительность миссии - 30 суток, в том числе работа на Луне - 15 суток. Луноход получил название «ECA» (Ek Choti si Asha
2).
1 Hum Honge Kamiyab - мы достигнем успеха (хинди).
2 Ek Choti si Asha - маленькая надежда (хинди).
Руководитель команды Team Indus заявил, что разрабатываемый модуль «HHK-1» рассчитан на посадку на безатмосферные небесные тела, в связи с чем планируется использовать его в дальнейшем для полетов к другим космическим телам Солнечной системы.
В феврале 2015 года команде Indus был присужден приз за демонстрацию посадочного устройства, пригодного для выполнения перелета к Луне и осуществления мягкой посадки.
В конце 2018 года Team Indus подписала соглашение с американской компанией OrbitBeyond, в соответствии с которым OrbitBeyond должна была осуществить запуск модуля «HHK-1», переименованного в «Z-01», для доставки на Луну научных приборов NASA.
 1.14. Team Italia
1.14. Team Italia
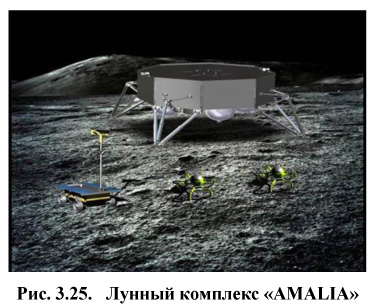
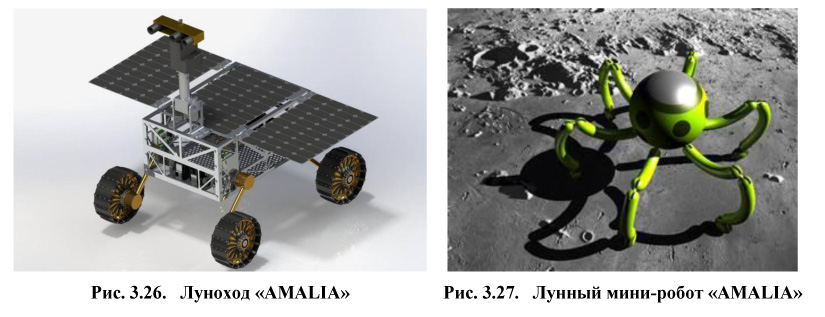
Итальянская команда Team Italia, возглавляемая профессором Амалией Эрколи-Финци (Amalia Ercoli-Finzi), изучала различные концепции роботов для проведения работ на лунной поверхности. Для участия в конкурсе «Google Lunar X-Prize» командой был спроектирован комплекс AMALIA (Ascensio Machinae Ad Lunam Italica Arte
1).
1 Ascensio Machinae Ad Lunam Italica Arte - восхождение машины на Луну через итальянское искусство (лат.).
Большой луноход должен иметь четырехколесное шасси, нести механизм развертывания антенны, телекамеры, радиооборудование, системы навигации и энергопитания. Масса лунохода - 62 кг.
Рассматривалась возможность доставки на Луну нескольких миниатюрных роботов, имеющих шагающий механизм передвижения.
 1.15. JURBAN
1.15. JURBAN
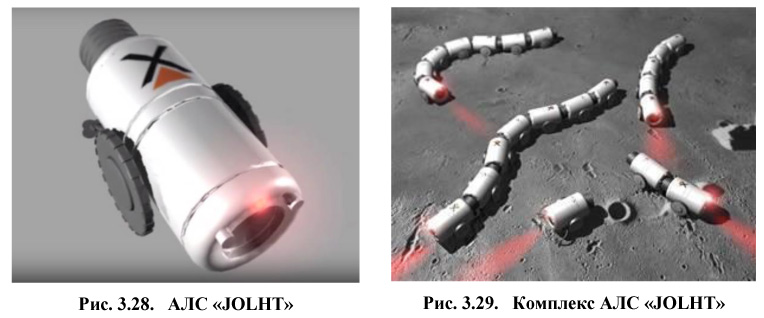
Команду JURBAN (the Juxtopia Urban Robotics Brilliant Application National challenge) организованную фирмой Juxtopia Group, Inc. (США), возглавлял Джейфус Досуэлл (Jayfus T. Doswell). Основной задачей проекта провозглашалось привлечение студентов университетов, главным образом, негритянских, и их обучение на примере полного цикла разработки АЛС «JOLHT».
Название АЛС было образовано из первых букв фамилий астронавтов:
- J : первая женщина-астронавт-негритянка Мэй Кэрол Джемисон (Mae Carol Jemison);
- O : первая женщина-астронавт испанского происхождения Эллен Лори Очоа (Ellen Lauri Ochoa);
- L : первый астронавт-негр Роберт Генри Лоуренс (Robert Henry Lawrence).
- Ht : первый астронавт-индеец Джон Беннетт Херрингтон (John Bennett Herrington);
Проект JURBAN включал:
- РН на углеводородном топливе для вывода АЛС на орбиту ИСЗ;
- электроионную ДУ для перевода АЛС с орбиты ИСЗ на траекторию полета к Луне;
- ДУ для торможения АЛС для выхода на орбиту ИСЛ и для торможения при посадке;
- надувной баллон для обеспечения мягкой посадки АЛС на Луну;
- собственно АЛС «JOLHT».
Ориентировочные размеры АЛС в транспортировочном состоянии: длина 1,5 м, ширина 0,6 м, высота 0,6 м. Масса около 90 кг. Надуваемый перед посадкой на Луну баллон должен обеспечить безопасную посадку при вертикальной скорости до 3 м/с.
Длительность полета от старта до развертывания АЛС на Луне должна составить около 10 суток.
АЛС «JOLHT» должна иметь возможность сохранять полную работоспособность после пребывания в течение 15 суток в условиях низких температур во время лунной ночи.
Разработчики предусмотрели возможность доставки на Луну нескольких АЛС типа «JOLHT» с разной аппаратурой и их соединения в «поезд», увеличивая, тем самым, функциональные возможности образуемого комплекса.
После выполнения части проектировочных работ команда JURBAN отказалась от дальнейшего участия в конкурсе.
1.16. LunaTrex
Команда LunaTrex была организована Питом Битаром (Pete Bitar), бизнесменом из штата Индиана, США. Командой была начата разработка лунного КА «Tumbleweed», но возникшие внутренние разногласия привели к расколу команды, при этом каждая из сторон отстаивала право на бренд «LunaTrex» и зарегистрированный логотип. Результатом явилось судебное разбирательство и запрет на использование символики «LunaTrex» обеим противоборствующим сторонам. Регистрация команды LunaTrex была аннулирована.
Пит Битар в сложившейся ситуации объявил, что зарегистрирует новое имя проекта «LunaRecon» и наберет новую команду, однако, ему не удалось привлечь нужных технических специалистов. На этом участие команды Пита Битара в конкурсе «Google Lunar X-Prize» закончилось.
1.17. Micro-Space
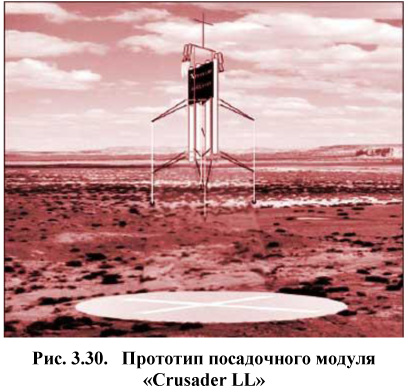
Компания Micro-Space Inc., созданная Ричардом Спеком (Richard Speck) из штата Колорадо (США) прорабатывала проект лунной АМС «Crusader
1 LL» (Lunar Lander) еще до объявления конкурса «Google Lunar X-Prize». Прототип АЛС участвовал в конкурсе «Northrop Grumman Lunar Lander competition» (NGLL), в котором соревновались команды, создававшие аппараты-демонстраторы вертикального взлета и последующей мягкой посадки на реактивной тяге.
1 Crusader - крестоносец (англ.).
Особенностью конструкций, создававшихся компанией Micro-Space, являлось применение связок блоков малого диаметра и большой длины. Каждый блок представлял собой полноценную ракетную ступень с топливными баками и ЖРД.
В соответствии с исходным проектом посадочный модуль «Crusader LL» должен был доставлять на Луну около 45 кг полезного груза, в состав которого входила буровая установка и приборы для химического анализа извлеченного грунта. АЛС, имеющая высоту 2,1 м, после бурения и анализа грунта должна была снова включить ЖРД и, используя остатки топлива, перелететь на новую точку лунной поверхности для повторения исследований грунта.
Для конкурса «Google Lunar X-Prize» проект «Crusader LL» был доработан. АМС должна была состоять из перелетно-посадочного модуля LTS (Lunar Transfer Stage) и одного или двух посадочных модулей LL (Lunar Lander). Полная масса комплекса с топливом - около 680 кг.
Для доставки АМС на орбиту ИСЗ предполагалось использовать РН Falcon 12 компании SpaceX.
Модуль LTS представлял собой связку из 30 типовых ракетных блоков, суммарная масса модуля - 520 кг, в т.ч. 450 кг топлива Этого количества топлива должно было хватить для ухода с околоземной орбиты и выхода на окололунную орбиту. Модуль LTS должен был оставаться на орбите спутника Луны и служить ретранслятором для посадочных модулей и роверов.
Каждый посадочный модуль доставлял на Луну облегченный ровер массой 30 кг. В связи с решением о доставке двух модулей LL (для повышения вероятности выполнения условий конкурса) вместо одного в исходном проекте, модули должны были иметь неполную заправку. Масса одного заправленного посадочного модуля (с ровером) - около 80 кг.
После смерти Ричарда Спека в 2011 году компания Micro-Space Inc. прекратила существование.
1.18. Moon Express
Компанию Moon Express Inc. (MoonEx) создали в августе 2010 года Нэйвин Джейн (Naveen Jain), Барни Пелл (Barney Pell) и Роберт Ричардс (Robert D. Richards). В планы компании входило создание серии универсальных посадочных аппаратов, которые могли бы использоваться для автоматической доставки на поверхность Луны различных грузов. Одной из перспективных задач считалось бурение грунта и поиск редких элементов.
В 2012 году компания Moon Express Inc. приобрела две команды, также являвшихся участниками конкурса «Google Lunar X-Prize»: Next Giant Leap и The Rocket City Space Pioneers (RCSP).
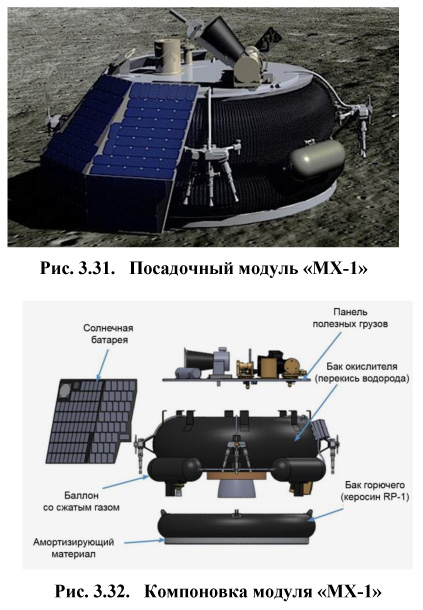
Разработанный компанией посадочный модуль «MX-1» («MoonEx-1») должен быть выведен на геопереходную орбиту, с которой модуль переводится на траекторию полета к Луне с помощью своей ДУ, работающей на керосине и концентрированной перекиси водорода. Далее ДУ используется для перехода на окололунную орбиту и торможения при выполнении мягкой посадки.
Конструктивно «MX-1» состоит из следующих блоков:
- тороидальный бак с топливом (керосин RP-1). Снизу к баку прикреплена амортизирующая подушка из энергопоглощающего материала;
- тороидальный бак с окислителем (концентрированная перекись водорода). По оси бака установлен маршевый ЖРД, а снаружи по четырем плоскостям - сопла системы ориентации. На баке закреплены также баллоны со сжатым газом для двигателей системы ориентации и для вытеснительной системы подачи топлива;
- панель солнечных элементов, которая устанавливается сбоку в наклонном положении;
- панель полезных грузов, устанавливаемая на бак окислителя сверху.
В сентябре 2015 года Moon Express подписала контракт с компанией Rocket Lab на выполнение трех запусков РН Electron с посадочным модулем «MX-1». Первые два запуска должны были быть выполнены в 2017 году. Компания запланировала также доставить в 2018 году на Луну в район южного полюса два телескопа: радиотелескоп диаметром 2,1 м и оптический телескоп.
В 2016 году Moon Express получила от правительства США разрешение на осуществление в 2017 году посадки КА «MX-1» на Луну, но использовать это разрешения не удалось из-за задержек в отработке РН Electron компанией Rocket Lab.
В 2014 году компания Moon Express была выбрана NASA для участия в программе «Lunar CATALYST». В 2018 году NASA подписала контракт с компанией Moon Express в рамках программы CLPS.
Несмотря на закрытие конкурса «Google Lunar X-Prize» в начале 2018 года, компания Moon Express продолжает разработку лунных посадочных аппаратов линейки «MX», рассчитывая на востребованность коммерческих услуг по доставке грузов на Луну.
1.19. Mystical Moon
Команда Mystical Moon («Мистическая Луна») не раскрывала никаких подробностей ни о составе команды, ни о разрабатываемом проекте. В заявке на регистрацию, переданную в оргкомитет конкурса «Goolgle Lunar X-Prize», были указаны название лунного КА - «Black Magic» (Черная магия) и псевдоним руководителя команды - Merlin
1.
1 Мерлин - в британском цикле легенд волшебник, наставник и советник короля Артура.
В середине 2011 года у команды возникли разногласия с оргкомитетом конкурса в связи с некоторыми уточнениями правил конкурса, после чего команда Mystical Moon отказалась от дальнейшего участия в конкурсе.
1.20. Next Giant Leap
Команда Next Giant Leap («Следующий гигантский прыжок») была образована несколькими промышленными и учебными организациями для участия в конкурсе «Google Lunar X-Prize». Название команды ассоциировано со знаменитой фразой Нейла Армстронга, первого человека, ступившего на Луну: «That's one small step for a man, one giant leap for mankind» (Это маленький шаг для человека, но гигантский прыжок для человечества).
Первоначально, в 2007 году, команда зарегистрировалась в оргкомитете конкурса под условным наименованием «Mystery Team» («Таинственная команда»). Официальное наименование команды было объявлено лишь в декабре 2008 года.
В 2012 году команда Next Giant Leap вошла в состав команды Moon Express, отказавшись от самостоятельного участия в конкурсе.
1.21. Odyssey Moon
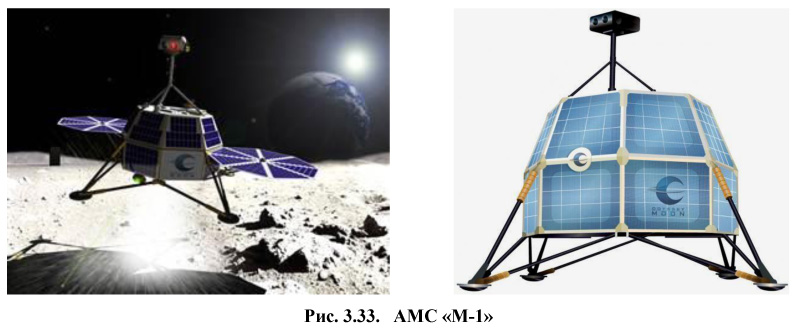
Компания Odyssey Moon Ltd., возглавляемая Риком Сэнфордом (Rick Sanford) и зарегистрированная на острове Мэн (остров в Ирландском море, коронное владение Британской короны), была первой командой, подавшей заявку на участие в конкурсе «Google Lunar X-Prize». Компания разрабатывала посадочный аппарат «MoonOne» («M-1»), в котором мог доставляться на Луну небольшой луноход.
В ноябре 2012 года компания Odyssey Moon Ltd. и израильская команда Team SpaceIl подписали соглашение о партнерстве в конкурсе. В соответствии с этим соглашением, команда Odyssey Moon отказывалась от дальнейшего самостоятельного участия в конкурсе, выступая далее, как корпоративный член команды Team SpaceIl.
В сентябре 2014 года компания Odyssey Moon Ltd. была приобретена фирмой Space Services Holdings, Inc. (Хьюстон, штат Техас, США).
 1.22. Omega Envoy
1.22. Omega Envoy
Команда Omega Envoy была организована для участия в конкурсе «Google Lunar X-Prize» компанией Earthrise Space, Inc. (ESI). Команда состояла, в основном, из студентов технических колледжей и университетов Флориды. Руководил командой Рубен Нунез (Ruben Nunez), президент компании ESI.
Omega Envoy разрабатывала в первую очередь луноход «Sagan», разработка посадочного модуля была отложена, в связи с чем для него даже не было зарезервировано название. Тем не менее, концеп-туальный проект под условным наименованием «Lunar Lander» у команды Omega Envoy существовал, что явилось причиной заключения в 2012 году соглашения, согласно которому ровер «Dandelion» чилийской команды AngelicvM должен был доставляться на Луну на посадочном модуле Omega Envoy. Задержки в разработке посадочного модуля Omega Envoy вынудили чилийскую команду искать другого разработчика. В 2015 году команда AngelicvM подписала новое соглашение о доставке своего ровера на Луну на посадочном модуле компании Astrobotic Technology Inc.
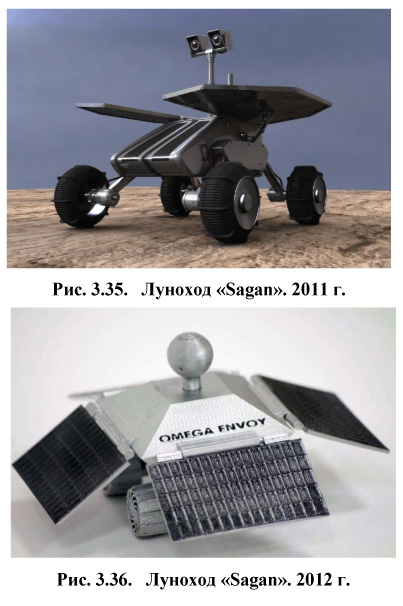
За годы работы над проектом команда Omega Envoy разработала несколько проектов лунохода «Sagan», некоторые из них показаны на рис. 3.35 - 3.37.
 1.23. Part-Time Scientists
1.23. Part-Time Scientists
Немецкая команда Part-Time Scientists считалась одним из фаворитов конкурса. Руководитель команды - Роберт Боме (Robert Bohme).
В разработке лунохода «Audi Lunar Quattro» участвовали инженеры компании Audi. Прототип лунохода, демонстрировавшийся на выставках, был назван «Asimov Jr.» (в честь американского писателя-фантаста Айзека Азимова).
Прототип посадочного модуля, разрабатываемого командой Part-Time Scientists, назван в честь французского писателя-фантаста Жюля Верна «Jules Verne». Окончательная конструкция модуля на конец 2015 года не была разработана.
Запуск комплекса «посадочный модуль плюс луноход» планировалось выполнить в 2017 году с помощью РН «Днепр». Для посадки был выбран район, где в 1972 году высаживалась американская пилотируемая экспедиция «Apollo 17».
1.24. Penn State Lunar Lion
Команда Penn State Lunar Lion, образованная в 2011 году, включала как студентов Университета штата Пенсильвания, США, так и специалистов лаборатории прикладных исследований Университета Penn State's Applied Research Laboratory. Руководитель команды - Майкл Пол (Michael V. Paul).
Проект команды Penn State Lunar Lion являлся оригинальным в том плане, что была поставлена задача создать КА, который выполнял бы функции перелетного и посадочного модулей одновременно. КА «Lunar Lion» («Лунный лев») должен с помощью своей ДУ переходить с орбиты ИСЗ на траекторию полета к Луне, выполнять необходимые коррекции орбиты и совершать прямую посадку без выхода на окололунную орбиту в Море Спокойствия, на 30 км южнее места посадки экспедиции «Apollo-11». После передачи в реальном времени видеоизображения окружающей лунной поверхности, как требуется по условиям конкурса «Google Lunar X-Prize», КА должен выполнить взлет с Луны и на небольшой высоте перелететь в другую точку Луны, отстоящей от места первой посадки не менее, чем на 500 м.
Запуск КА «Lunar Lion» на орбиту ИСЗ планировалось осуществить в декабре 2015 года. Команда Phoenicia2, также участвовавшая в конкурсе «Google Lunar X-Prize», организовала посреднический бизнес по доставке на орбиту ИСЗ небольших спутников, разработав кассетный блок для РН Falcon 9 компании SpaceX. Блок, размещаемый под головным обтекателем, обеспечивает фиксацию и отделение в заданное время грузов заказчиков. Одним из таких заказчиков рассчитывала быть команда Penn State Lunar Lion.
В августе 2015 года Майкл Пол сообщил, что команда Penn State Lunar Lion выходит из участия в конкурсе, но будет продолжать работу, чтобы в течение десятилетия построить КА «Lunar Lion» и осуществить его полет на Луну.
1.25. Team Phoenicia
Команда Team Phoenicia для участия в конкурсе «Google Lunar X-Prize» разрабатывала АМС с поэтическим названием «Storming the High Heavens» («Штурмуя высокие небеса»). АМС состояла из перелетно-посадочного модуля с грузовым отсеком и небольшого ровера, перевозимого в грузовом отсеке. Руководил командой Уильям Бэйрд (William P. Baird).
Начальный проект предполагал запуск АМС на геопереходную орбиту в качестве дополнительного полезного груза. После отделения от основного КА модуль с помощью собственной ДУ переводится на траекторию прямой посадки в районе южного полюса. Торможение при посадке выполняется двигательной установкой, но для амортизации при посадке используются надувные баллоны. После посадки открывается грузовой отсек, из которого на поверхность Луны выдвигается ровер в сложенном состоянии, затем элементы конструкции ровера развертываются в рабочее положение: колеса шасси, антенна, мачта телекамер, панель солнечных элементов.
Позднее команда Team Phoenicia организовала посреднический бизнес по доставке на орбиту ИСЗ небольших грузов, разработав универсальный блок для размещения грузов под головным обтекателем РН Falcon 9 компании SpaceX. В первом запуске грузовой блок должен был нести также АМС «Storming the High Heavens».
В 2015 году команда Team Phoenicia вышла из участия в конкурсе «Google Lunar X-Prize».
 1.26. Team Plan B
1.26. Team Plan B
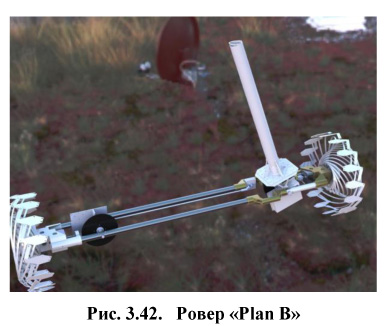
Компания Adobri Solution Ltd. (Ванкувер, Канада), возглавляемая Алексом Добрянски (Alex Dobrianski), для участия в конкурсе «Google Lunar X-Prize» сформировала из своих сотрудников группу под названием «Team Plan B» (команда «Plan B»). Команда Plan B разрабатывала небольшой аппарат для доставки на Луну самодвижущегося устройства.
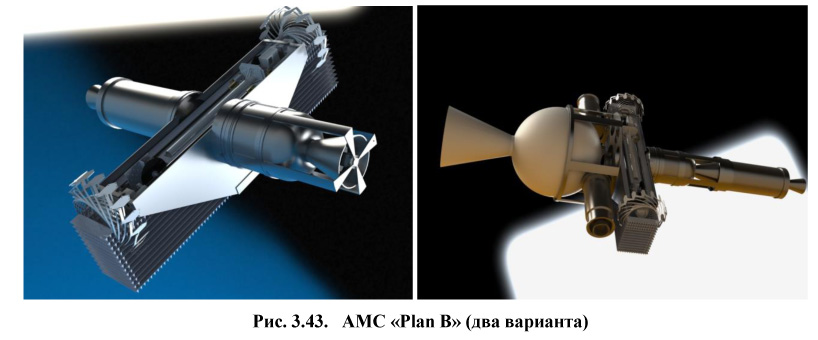
Для полета на Луну используется выведение на эллиптическую орбиту с апогеем на высоте стационарной орбиты. Особенностью схемы полета на Луну АМС «Plan B» является использование нескольких РДТТ, которые имеют фиксированную величину импульса. Такая схема требует точных измерений параметров орбиты и ориентации АМС для включения РДТТ. После нескольких витков по опорной орбите АМС с помощью одного из РДТТ переводится на траекторию прямого попадания в Луну. С помощью другого РДТТ АМС тормозится для снижения скорости перед касанием поверхности. Для обеспечения мягкой посадки используется надувной баллон. На поверхность Луны доставляется ровер, представляющий собой два пружинных колеса, соединенных рамой. На раме закрепляются все устройства ровера: гироскоп, антенна, электронные блоки, источник питания, электродвигатели.
Масса АМС «Plan B» на орбите ИСЗ 100-150 кг, на Луну доставляется груз массой 10 кг, в том числе ровер массой 4 кг.
Предусматривалось два запуска АМС «Plan B», с интервалом в несколько месяцев для устранения ошибок, выявленных по итогам первого запуска.
 1.27. Team Puli
1.27. Team Puli
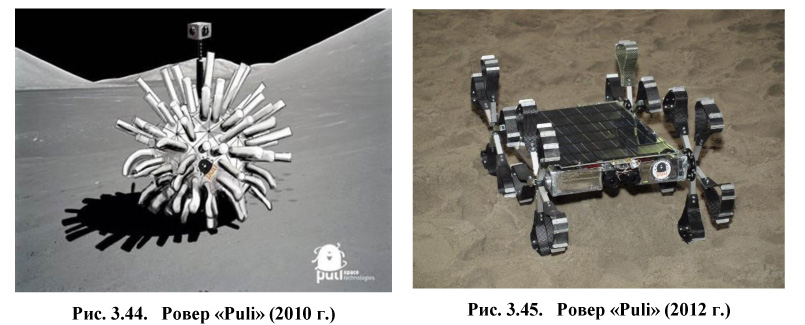
Для участия в конкурсе «Google Lunar X-Prize» в Венгрии в 2010 году была зарегистрирована компания Puli Space Technologies, на базе которой образована команда Team Puli. Возглавляет команду президент компании Тибор Пэчер (Tibor Pacher). Команда разрабатывает ровер, для доставки которого на Луну предполагается использовать технические средства какой-либо частной компании.
Согласно первоначальному проекту, ровер должен был представлять собой сферический корпус с выступами. Движение ровера должно было происходить за счет смещения центра тяжести, создаваемого внутренним механизмом.
Позднее была выбрана другая схема передвижения ровера по лунной поверхности. Корпус ровера был установлен на шасси, состоящее из четырех устройств, названных «wheg» - искусственный термин, образованный из двух английских слов «wheel» - колесо и «leg» - нога. В 2012 году был построен прототип ровера, и проведены его натурные испытания.
Разработку и изготовление летного экземпляра ровера планировалось завершить в 2014 году. Доставку ровера на Луну команда Team Puli надеялась осуществить в 2017 году.
 1.28. Quantum3
1.28. Quantum3
Американская команда Quantum3 была зарегистрирована в оргкомитете конкурса «Google Lunar X-Prize» в январе 2008 года. Руководил командой президент компании Carliner Strategies, L.L.C., (Вашингтон, США) Пол Карлайнер (Paul Carliner).
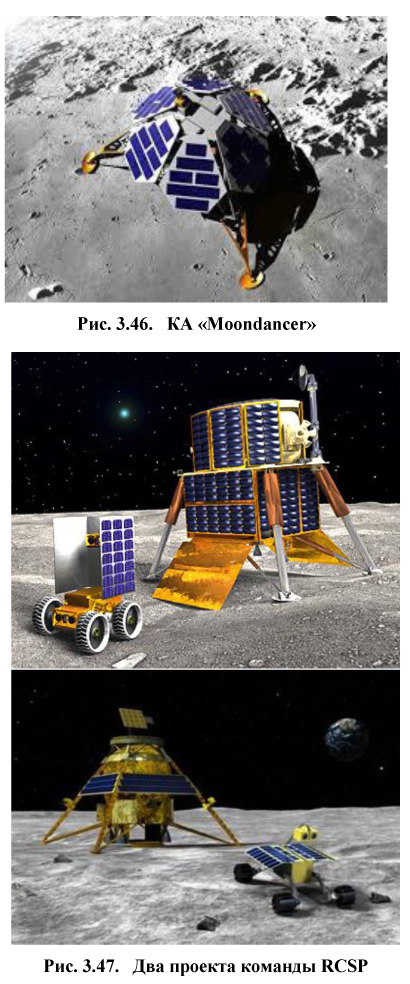
В планах команды было разработать КА «Moondancer» («Лунный танцор»). КА должен был выводиться на орбиту ИСЗ какой-либо коммерческой РН, после чего с помощью собственной ДУ переходить на траекторию прямого полета к Луне и выполнять реактивную посадку в Море Спокойствия.
Последовательными включениями двигательной установки КА должен был перелетать на небольшие расстояния над поверхностью Луны.
В августе 2008 года было сообщено, что команда Quantum3 прекращает свое участие в конкурсе.
1.29. Rocket City Space Pioneers
В команду Rocket City Space Pioneers (RCSP) входили представители нескольких организаций из Хантсвилла (штат Алабама, США). Ведущей организацией являлась компания Dynetics. Руководитель команды - Тим Пикенс (Tim Pickens).
Начальный проект команды RCSP представлял собой посадочный модуль с отсеком, закрытым откидной крышкой-трапом. В отсеке перевозился на Луну мини-луноход размерами 20 х 30 х 40 см и массой менее 10 кг. Весь модуль в сложенном состоянии имел габариты 60 х 60 х 98 см. Масса посадочного модуля (с топливом) - около 200 кг.
Вскоре проект посадочного модуля был переработан. Было решено использовать ДУ, работающую на однокомпонентном топливе. Из стоек шасси были убраны телескопические амортизаторы. Конструкция ровера также была переработана. Новый вариант имел размеры 30 х 30 х 15 см и массу 10 кг.
Схема доставки посадочного модуля на Луну подразумевала кооперацию с несколькими другими компаниями, также отправляющими свои КА к Луне. Все КА должны были закрепляться на едином каркасе кольцевой конструкции, образуя модуль полезных нагрузок (модуль ПН). Планировалось, что РН Falcon1 компании SpaceX выведет этот модуль, пристыкованный к разгонному блоку (РБ), на геопереходную орбиту. РБ переведет модуль ПН на траекторию полета к Луне, где очередным включением ДУ выведет модуль на низкую окололунную орбиту. После отделения от РБ происходит разделение полезных нагрузок. Отделившийся посадочный модуль с помощью своей ДУ выполняет посадку на Луну.
В декабре 2012 года компания Dynetics подписала соглашение о вхождении команды RCSP в состав команды Moon Express. Руководитель RCSP Тим Пикенс занял в Moon Express пост Главного специалиста по двигательной установке.
 1.30. Team Selene
1.30. Team Selene
Команду Team Selene организовал в Шанхае гражданин Германии Маркус Биндхаммер (Markus Bindhammer), переехавший из Баварии, где он родился, в Китай. Команда была набрана из студентов китайских ВУЗов. Перед командой была поставлена цель разработать луноход, приводимый в движение реактивной тягой. Луноход получил название «LuRoCa 1» (Lunar Rocket Car 1). Посадочный модуль «Selene 1», доставляющий луноход на поверхность Луны, должен был запускаться китайской или американской РН.
Команда Team Selene в 2010 году вышла из участия в конкурсе.
1.31. Selenokhod (Селеноход)
Единственная российская команда, участвовавшая в конкурсе «Google Lunar X-Prize» - команда «Селеноход» (по заявке в оргкомитет конкурса - «Selenokhod»), которую организовал в 2009 году Николай Дзись-Войнаровский.
Командой был разработан проект комплекса «Селеноход», который, в соответствии с начальным проектом, должен был состоять из разгонного блока (РБ), перелетно-посадочного модуля (ППМ) и одного или нескольких мини-роверов.
Комплекс выводится на околоземную орбиту с помощью РН «Днепр». РБ выполняет перевод КА на траекторию полета к Луне, после чего отбрасывается. ППМ обеспечивает коррекции траектории на участке полета к Луне, торможение и выход на орбиту ИСЛ, сход с орбиты и мягкую посадку на Луну. После посадки стенки грузового отсека откидываются, выполняя роль аппарелей для схода мини-роверов на поверхность Луны. Откидываемые стенки с внутренней стороны покрыты солнечными элементами и после открытия образуют панели солнечных батарей.
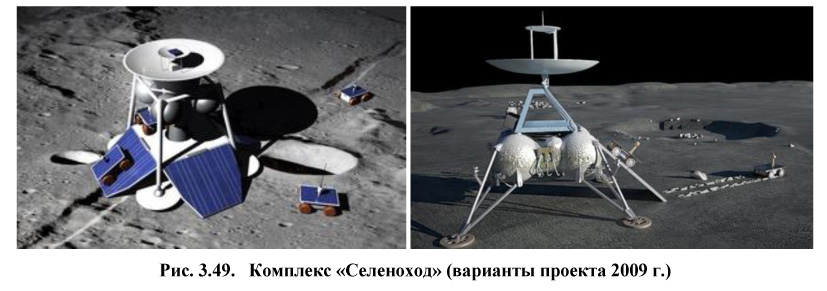
Мини-роверы имеют четырехколесное шасси и мачту с видеокамерой. На верхней поверхности корпусов размещены панели солнечных элементов. Видеоизображение с мини-роверов передается на посадочный модуль, который служит ретранслятором для передачи информации на Землю.
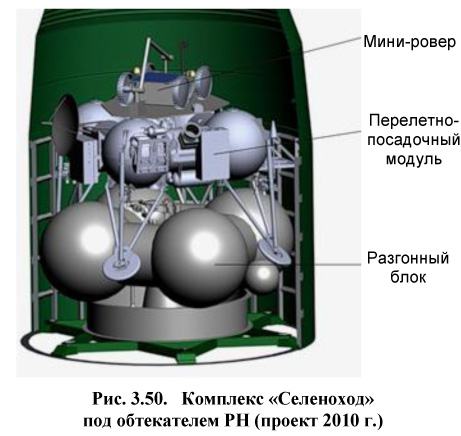
В 2010 году проект перелетно-посадочного модуля был переработан. Количество мини-роверов было сокращено до одного, при этом кроме съезда по аппарели были рассмотрены и другие схемы транспортировочного размещения мини-ровера и его спуска на поверхность: с помощью манипулятора; подвешивание между баками и простая отцепка.
Углубленная проработка конструкции мини-ровера показала, что для уверенного передвижения колесного ровера по лунному грунту необходимо увеличивать диаметр колес, что привело к вынужденному увеличению массы ровера до 15 кг, в то время как в проект закладывалось ограничение в 5 кг. В связи с этим было принято решение разработать шагающий мини-ровер, использующий способ передвижения, аналогичный примененному в советских мини-марсоходах ПрОП-М.
В 2011 году стало очевидно, что самостоятельно разработать перелетный и посадочный модули команде «Селеноход» не под силу. Было принято решение сосредоточиться на разработке шагающего мини-ровера с устройством для бурения грунта, доставляемого на Луну в составе российской АМС «Луна-Глоб», запуск которой в то время планировался на 2014 год. Однако, запуск АМС был перенесен на длительный срок, и работа команды «Селеноход» окончательно потеряла перспективы реализации.
В декабре 2013 года Николай Дзись-Войнаровский официально заявил о выходе команды «Селеноход» из конкурса «Google Lunar X-Prize».
1.32. Southern California Selene Group
Команду Southern California Selene Group (SCSG) из Южной Калифорнии, США, собрал Хэролд Розен (Harold Rosen), под чьим руководством в 1964 году был разработан и успешно запущен первый геостационарный спутник Syncom-3. Первоначально команда имела название «Santa Monica Selene Group» - по названию города, где жил Розен. В начале 2008 года, когда команда была собрана, было решено изменить название, расширив регион, указываемый в названии, с города Санта Моника до Южной Калифорнии. Так команда стала называться Southern California Selene Group.
Первый проект лунного КА, названного «Spirit of Southern California» («Душа Южной Калифорнии»), был подготовлен в феврале 2008 года. В состав КА входили разгонный блок Tiokol Star-30, тормозной блок Tiokol Star-17, перелетная ракетная ступень, оборудованная ЖРД, и собственно посадочный КА «Spirit of Southern California».
Схема полета выглядела следующим образом. РН Falcon 11 компании SpaceX выводит на около-земную орбиту высотой 200 км КА общей массой 700 кг (рис. 3.53). Разгонный блок отправляет КА к Луне и отделяется. КА во время перелета стабилизируется вращением. Перелетная ступень (рис. 3.54) обеспечивает навигацию, управление, коррекции траектории и при сближении с Луной отделяется. Тормозной блок обеспечивает снижение скорости КА (рис. 3.55) и также отбрасывается. Дальнейший спуск и посадка выполняются с помощью собственной ДУ, состоящей из четырех монокомпонентных ЖРД (рис. 3.56).
Корпус КА представляет собой цилиндрическое кольцо, подвешенное к шасси из трех гибких опор. Внутри кольцевого корпуса при перелете размещается тормозной блок Star 17. Аппаратура КА размещается в кольцевом корпусе. На внешней поверхности корпуса расположены элементы солнечной батареи. По оси КА установлена мачта с телекамерой и зеркалом, обеспечивающим съемку поверхности Луны как вблизи КА, так и на удалении. Для кругового обзора камера вместе с зеркалом вращается вокруг мачты.
Особенностью проекта является вращающийся корпус КА, подвешенный под неподвижной частью конструкции, в которую входит и шасси. Такая схема - частично вращающийся КА, - была реализована Розеном в большом количестве конструкций, начиная с ИСЗ «Syncom». Шасси, состоящее из трех гибких опор, обеспечивает безударную посадку. Корпус после посадки продолжает вращаться, играя роль гироскопа.
Перемещение КА по поверхности Луны происходит за счет кратковременного включения посадочных ЖРД, после чего КА в свободном движении перелетает на какое-то расстояние и снова совершает посадку на гибкие опоры.
За время проектирования КА компания SpaceX улучшила характеристики своей РН Falcon 1, что позволило SCSG увеличить начальную массу КА на орбите ИСЗ с 700 кг до 900 кг. За счет этого в проект КА «Spirit of Southern California» удалось внести два существенных изменения:
- из состава перелетной ступени удалили двигательную установку, оставив только навигационно-связное оборудование и переложив функции коррекции траектории на посадочную ДУ;
- в посадочной ДУ применили двухкомпонентные ЖРД.
Эти улучшения позволили увеличить максимальную дистанцию перелета над поверхностью Луны с начальных 500 м до 5 км.
Согласно доработанному проекту, после отделения разгонного блока, масса КА составляет 290 кг, в том числе 60 кг - перелетная ступень, 80 кг - тормозной блок, 150 кг - посадочный аппарат. Запас топлива в посадочном аппарате составляет 100 кг, из которых 20 кг отведено на межперелетные коррекции траектории. 15 кг топлива планировалось сохранить при первой посадке на Луну для выполнения последующего «подскока».
В июне 2008 года команда Southern California Selene Group прекратила свое участие в конкурсе в связи с несогласием с проводимой организаторами конкурса политикой коммерциализации космоса.
1.33. SpaceIL
Команду SpaceIL организовали в конце 2010 года три молодых израильских инженера - Ярив Баш (Yariv Bash), Кфир Дамари (Kfir Damari) и Йехонатан Вейнтрауб (Yehonatan Weintraub).
По первому проекту лунный КА, названный «Sparrow»
1, представлял собой шестигранный цилиндр на трех опорах. Масса КА - 90 кг, габариты корпуса - 80 х 80 см. На опорах высота КА - 1,6 м.
1 Sparrow - воробей (англ.).
КА «Sparrow» должен был выводиться на геосинхронную орбиту в качестве попутного груза. С орбиты ИСЗ КА должен переходить на траекторию полета к Луне и совершать выход на окололунную орбиту и посадку с помощью своей ДУ.
Ровер проектом SpaceIL не предусматривается. Перемещение КА должно выполняться путем включения ДУ и повторной посадки на некотором расстоянии от места первичной посадки.
Когда проект был проработан более подробно, корпус КА увеличили в высоту, на боковых гранях разместили солнечные батареи.
В 2015 году руководителем команды стал Эран Привман (Eran Privman). К этому времени был подготовлен новый проект КА, показанный на рис. 3.59. КА имеет шасси с четырьмя опорами, маршевый ЖРД, расположенный в центре КА, и четыре блока ЖРД ориентации, каждый из которых состоит из двух ЖРД малой тяги. Диаметр КА 1,49 м по корпусу и 2,288 м по опорам, высота - 1,535 м. Стартовая масса - 585 кг, в т.ч. 425 кг топлива.
В сентябре 2015 года команда SpaceIL подписала контракт на запуск КА «Sparrow» на РН Falcon 9 во второй половине 2017 года. Контракт подписан через американскую компанию Spaceflight Industries, которая выкупает у SpaceX запуск РН Falcon 9 целиком и комплектует полную загрузку РН, обеспечивая размещение небольших грузов нескольких заказчиков в одном универсальном переходнике под общим обтекателем и последующее их отделение для вывода на согласованную с заказчиком траекторию. КА «Sparrow» должен быть одним из таких грузов.
В отличие от других команд, SpaceIL - организация не коммерческая, а созданная в научных и образовательных целях. В случае победы призовой фонд планировалось пожертвовать на техническое образование в израильских школах.
После закрытия конкурса в начале 2018 года SpaceIL продолжила работу по подготовке КА, переименованного в «Beresheet», к запуску на Луну за счет спонсорской помощи.
1.34. SpaceMETA
Бразильскую команду SpaceMETA организовал в 2010 году Сергио Кабрал Кавальканти (Sergio Cabral Cavalcanti). В планы команды входило создать лунный самодвижущийся аппарат с использованием новейших технологий, в частности, с применением новых материалов и энергонезависимых инженерных решений.
Разработанный командой проект ровера «Solitair» основывался на применении пружин, выполненных из нитинола - металлического сплава с эффектом памяти. Нагреваясь под действием солнечных лучей, пружины удлиняются, толкая сферический корпус ровера. «Solitair», по замыслу разработчиков, будет перемещаться по поверхности Луны прыжками. При касании ровером грунта после очередного прыжка пружины вновь сжимаются, запасая энергию. Одновременно производится измерение прочности грунта. Корпус ровера выполняется из полупрозрачного материала для проникновения солнечных лучей. Таким образом, предполагается, что ровер будет перемещаться по Луне практически без затрат энергии собственного источника питания.
Доставку ровера на Луну планировалось выполнить с помощью украинской РН «Циклон-4» и КА «LUMEM» (LUnar Micro Explorer Mission - миссия лунного микро-исследователя). КА «LUMEM», разрабатываемый также командой SpaceMETA, состоит из орбитального и посадочного блоков. Оба блока оснащаются ЖРД, использующими этиловый спирт в качестве топлива. Орбитальный блок обеспечивает перелет с околоземной орбиты до орбиты спутника Луны, на которой остается для выполнения роли ретранслятора.
SpaceMETA рассчитывала с помощью аппаратуры своего ровера провести поиск водяного льда, находящегося под лунным грунтом.
1.35. Stellar
Международная команда Stellar была организована в конце 2007 года под эгидой научно-исследовательского центра Advanced Aerospace Resource Center из штата Северная Каролина, США. В планы команды входило создание как посадочного модуля, так и лунного ровера. Для запуска лунного комплекса планировалось воспользоваться пусковыми услугами одной из компаний, например компании SpaceX.
В начальном проекте, разработанном в 2008 году, ровер имел необычную конструкцию шасси - каждая из шести опор ровера имела по три цилиндра, расположенных треугольником. Движение могло осуществляться как путем подачи энергии на двигатели, крутящие собственно цилиндры каждой опоры, так и путем вращения треугольных кронштейнов, на которых закреплены цилиндры. Такая схема движителей должна была облегчить преодоление препятствий в виде камней и уступов.
Конструкция приводов шасси получалась достаточно сложной, поэтому в дальнейшем была выбрана схема шасси, более близкая к традиционной. Новый вариант ровера получил наименование «Stellar Eagle» (Звездный орел).
По состоянию на 2012 год старт лунного комплекса команда Stellar рассчитывала произвести в середине 2014 года, но этот срок выдержать не удалось.
 1.36. Synergy Moon
1.36. Synergy Moon
Команда Synergy Moon объединяет специалистов из 15 стран. Первоначально команду возглавлял Мирослав Амбруш-Киш (Miroslav Ambrus-Kis), которого затем сменил Небойша Станоевич (Nebojsa Stanojevic).
Проект команды Synergy Moon выглядит следующим образом. РН Neptun L-1000 компании InterOrbital Systems (IOS) выводит на траекторию полета к Луне КА «CYGO Cruiser», представляющий собой комплекс из нескольких объектов. На участке полета к Луне от «CYGO Cruiser» отделится сначала наноспутник «TubeSAT», а затем лунный посадочный модуль «Lunar Lander». Посадочный модуль доставит на Луну два ровера - «Tesla Surveyor» и «Tesla Prospector».
Ровер «Tesla Prospector» представляет собой небольшой луноход на четырехколесном шасси. Две видеокамеры подняты на мачте, расположенной в передней части корпуса. Предполагается, что «Tesla Prospector» будет нести оборудование для исследований лунного грунта.
Ровер «Tesla Surveyor» имеет сферическую форму с выступами по горизонтальной оси. Движение ровера осуществляется за счет смещения центра тяжести. Основное назначение ровера - выполнение условий конкурса о перемещении на расстояние не менее 500 м.
Команда Synergy Moon привлекает к своей работе художников со всего мира, предложив доставить их произведения на Луну (в цифровом виде).
 1.37. White Label Space
1.37. White Label Space
Команда White Label Space была создана в 2008 году в Нидерландах под руководством Стива Аллена (Steve Allen) для участия в конкурсе «Google Lunar X-Prize». Командой был подготовлен проект лунохода PM-1 (Prototype Moon rover 1)
В 2010 году на базе команды была образована компания White Label Space Japan LLC, зарегистрированная в Японии. В 2012 году компания представила прототип лунохода PM-2, названного «White Rabbit» («Белый кролик»). Одновременно часть команды занималась разработкой посадочной ступени.
В 2013 году команда White Label Space была переименована в команду Hakuto.
 3.7.2. АМС «SuperSat»
3.7.2. АМС «SuperSat»
Коммерческий проект компании LunaCorp по созданию и запуску искусственного спутника Луны «SuperSat» для передачи высококачественного видеоизображения на всем пути от Земли к Луне и последующего проведения видеосъемок с орбиты ИСЛ, а также для составления полной карты Луны.
Планировалось окончательную сборку АМС выполнить на борту МКС, после чего «SuperSat» должен был отправиться к Луне. Называвшийся срок запуска - 2005 год.
В связи с ликвидацией компании LunaCorp в 2003 году работы по проекту АМС «SuperSat» были прекращены.
3.8. Проект АМС «Mona Lisa»
В мае 2006 года германская фирма OHB System продемонстрировала на VIII Международном аэрокосмическом салоне ILA-2006 макет АМС «Mona Lisa», предназначенной для исследований Луны.
3.11.2. Экспериментальная АМС «SmallTug»
Летом 2005 г. фирма SpaceDev получила контракт субподряда от компании Andrews Space
1 на первый этап разработки экспериментального КА, который должен был продемонстрировать возможность применения нестандартных подходов в баллистике и некоторых новых технологий. АМС «SmallTug» должна была иметь высокоэффективные солнечные батареи и электрореактивный двигатель. Используя двигатель малой тяги, АМС должна была в течение года выйти в точку либрации L1 системы Земля-Луна, а затем вернуться на низкую околоземную орбиту. Масса АМС - около 100 кг.
1 Andrews Space, в свою очередь, получила 15.04.05 г. контракт на первый этап проекта SmallTug от NASA.
Планировалось выполнить запуск АМС «SmallTug» в 2008 году, однако, проект не был реализован
3.12.2. Проект «Electra I»
«Electra I» - коммерческая АМС для доставки груза величиной до 10 кг на поверхность Луны. Доставляемому объекту предоставляется энергопитание и радиосвязь для передачи информации и получения команд. Работа оборудования возможна только во время лунного дня, во время ночи для аппаратуры обеспечивается минимальное энергопитание и температурный режим. Предполагалось, что в модифицированных версиях АМС будет обеспечена нормальная работа аппаратуры также и ночью. Первый запуск планировался на 2006 год.
3.12.3. Проект «Electra II»
В проекте «Electra II» предполагалось осуществлять доставку на Луну небольшого лунохода. В качестве транспортной ступени должна использоваться АМС «Electra I». Ожидавшийся срок запуска - 2008 год.
Компании TransOrbital Inc. не удалось найти достаточное количество заказчиков для финансирования проектов лунных АМС, в результате компания была ликвидирована.
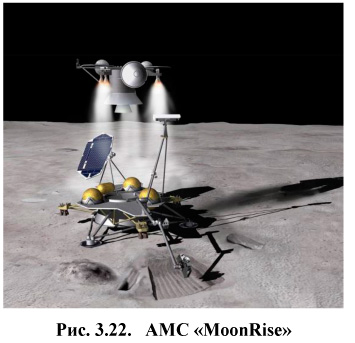
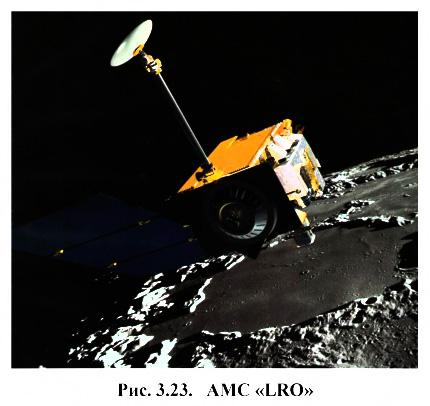
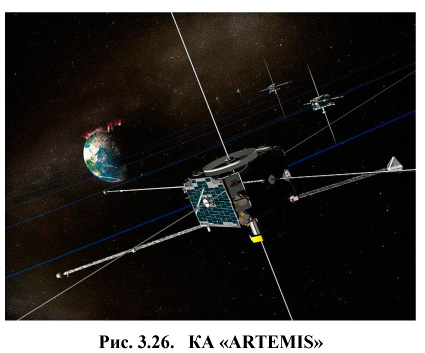
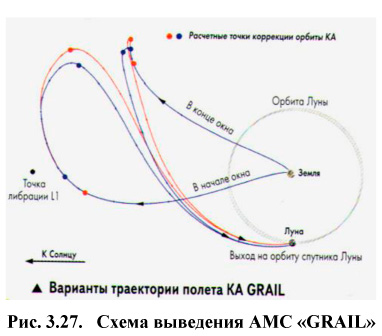
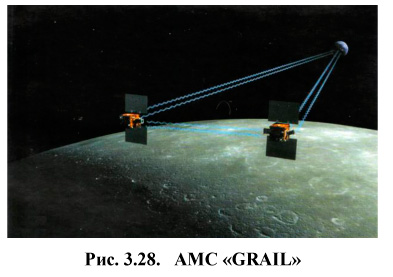
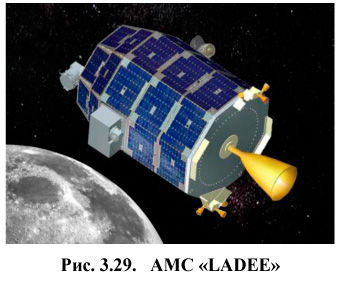
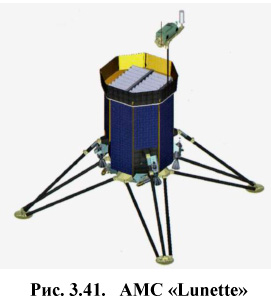
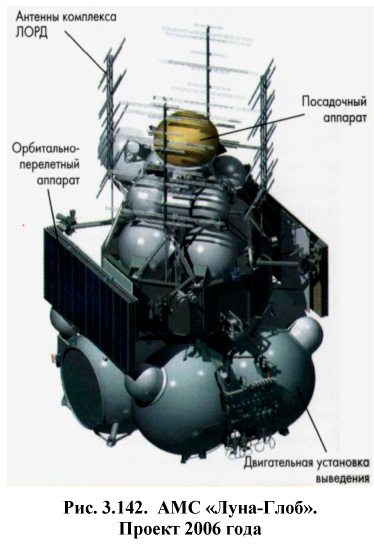

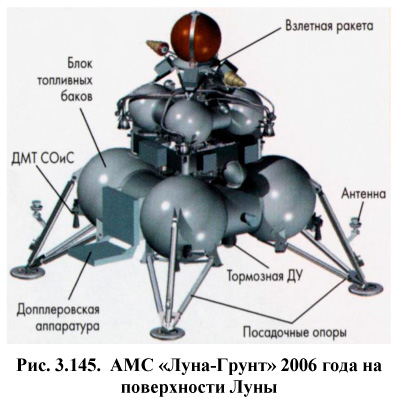

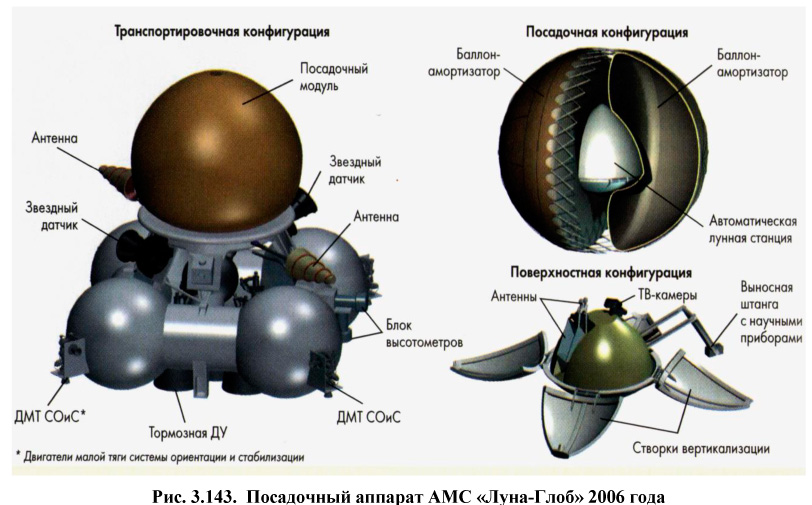

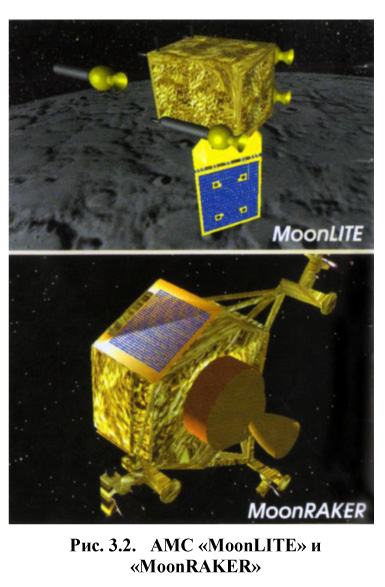
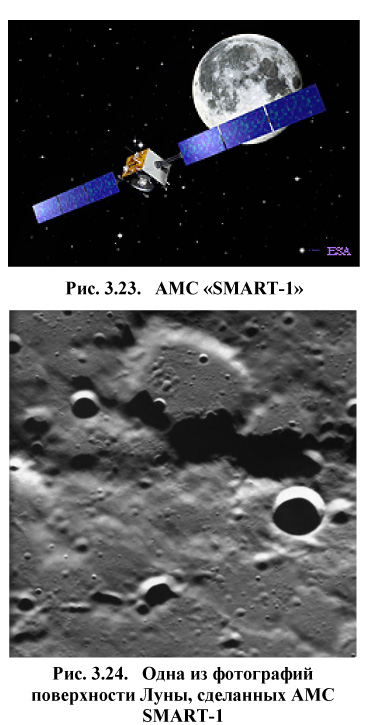
 2.6. Германия. Исследования Луны
2.6. Германия. Исследования Луны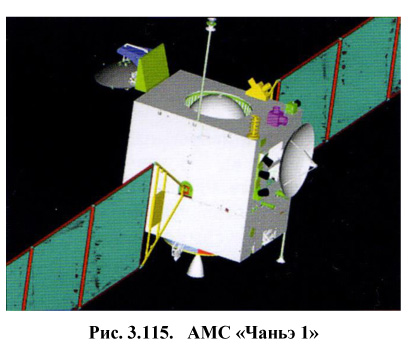


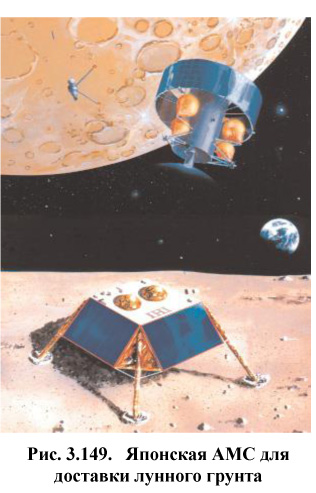
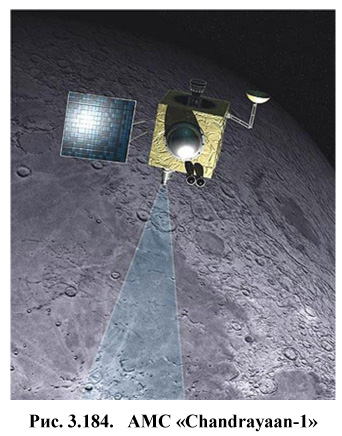

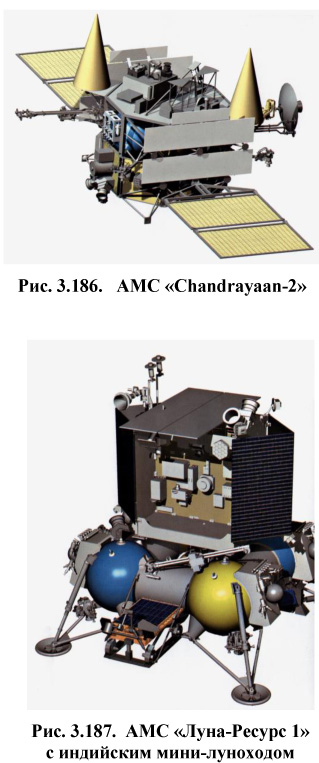 8.2. Российско-индийский проект «Chandrayaan-2»
8.2. Российско-индийский проект «Chandrayaan-2» 8.2.1. Орбитальная АМС «Chandrayaan-2»
8.2.1. Орбитальная АМС «Chandrayaan-2»