Сиддики:
Научные инструменты:
Посадочный модуль:
1. Камера местности (TCAM)
2. посадочная камера (LCAM)
3. Ультрафиолетовый телескоп на Луне (МУВТ)
4. камера экстремального ультрафиолета (EUVC)
«Юйту»:
1. панорамная камера (PCAM)
2. Лунная радиолокационная станция (ЛПР)
3. визуальный спектрометр (VIS-NIR)
4. Рентгеновский спектрометр, индуцированный активными частицами (APXS)
Результаты: Запущенный в рамках второй фазы китайской программы исследования Луны, «Чанъэ-3» был самым сложным роботизированным зондом, запущенным китайцами на сегодняшний день. Космический аппарат включал в себя четырёхопорный спускаемый аппарат мягкой посадки и небольшой вездеход по имени «Юйту» («Нефритовый кролик») для движения по поверхности Луны. 765-килограммовый спускаемый аппарат был основан на корпусе в форме восьмиугольника с четырьмя ножками, дроссельной заслонкой внизу, складными солнечными панелями, блоком радиоизотопного нагревателя для выработки тепла и тремя камерами инженерного наблюдения вверху. Срок службы посадочного модуля составлял один год. Помимо технологических целей миссии, спускаемый аппарат и ровер также преследовали некоторые научные цели, включая исследование лунной топографии и геологического строения Луны; изучение вещественного состава лунной поверхности; исследование космической среды между Луной, Землей и Солнцем; и проведение астрономических наблюдений с поверхности Луны. Запуск был затруднен из-за ступени ракеты, которая упала на деревни, расположенные ниже от стартовой площадки, хотя никто не пострадал. Полезная нагрузка была выведена непосредственно на переходную лунную орбиту размером 210 х 389 109 километров под углом наклона 28,5°. После двух коррекций на середине пути (2 и 3 декабря) космический аппарат запустил двигатель в 09:41 на 6 минут и вышел на 100-километровую круговую орбиту вокруг Луны. 10 декабря «Чанъэ-3» выведен на орбиту 15х100 км. Когда он достиг перигея 14 декабря, его двигатель заработал в 13:00 для спуска на поверхность Луны (очевидно, на один виток раньше запланированного, вероятно, для обеспечения прямой трансляции по китайскому телевидению). 11-минутная операция приземления была прервана «маневром уклонения от опасности» на высоте около 100 метров над поверхностью. Главный двигатель отключился на высоте 4 метров над поверхностью, и спускаемый аппарат упал на поверхность, приземлившись в 13:11, таким образом, став первым космическим аппаратом, совершившим мягкую посадку на Луну после советской Луны-24 в 1976 году.

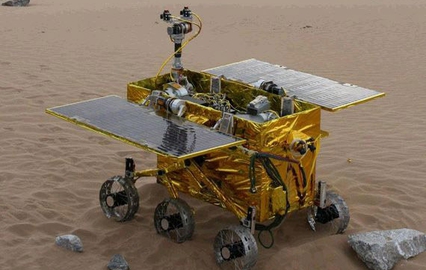
Снимок, сделанный 13 января 2014 года панорамной камерой (PCAM) на борту китайского лунохода Yutu, когда он смотрит на посадочный модуль Chang’e 3.
Координаты посадки были объявлены как 19,51° з.д. / 44,12° с.ш., в северо-западной части Mare Imbrium, которая, как оказалось, отличалась от того, что было объявлено ранее - Sinus Iridum. Сразу после приземления на «Чанъэ-3» были задействованы солнечные батареи. Вскоре к «Юйту» была отправлена команда развернуть две его солнечные батареи и разблокировать колеса. «Юйту» был 6-колесным мобильным космическим аппаратом, способным передавать видео в реальном времени и выполнять относительно простой анализ почвы. Как и спускаемый аппарат, ровер имел собственные блоки радиоизотопного обогревателя (с использованием плутония-238) для обогрева. У него также были датчики, которые позволяли ему автоматически преодолевать препятствия на поверхности. Его первоначальный запланированный срок службы составлял три месяца, в течение которых он должен был обойти площадь в 3 квадратных километра. В 20:10 14 декабря ровер начал медленно приближаться к трапу, затем медленно спускался, пока его колёса не коснулись поверхности Луны. В 20:35 ровер развернулся и коснулся поверхности. Ровер оставался в точке А, примерно в 10 метрах к северу от посадочного модуля, примерно 13 часов, пока не развернулся, и 15 декабря камеры ровера и посадочного модуля сфотографировали друг друга. Затем ровер медленно переместился в точку B и перешел в спящий режим на четыре дня. Проснувшись 20 декабря, «Юйту» проехал около 21 метра от точки B до точки C, а затем до точки D, тестируя свою роботизированную руку 23 декабря. И посадочный модуль, и ровер перешли в режим гибернации 25 и 26 декабря соответственно, в преддверии наступления лунной ночи. 11–12 января спускаемый аппарат и «Юйту» были выведены из сна, чтобы начать свой второй лунный день. Однако ровер столкнулся с главной проблемой в конце месяца; 25 января китайские СМИ объявили, что «Юйту» пострадал от «механической аномалии управления», вызванной «сложной окружающей средой на поверхности Луны».

Снимок, сделанный 17 декабря 2013 года камерой ландшафта посадочного модуля (TCAM) на борту китайского посадочного модуля «Чанъэ-3», показывает ровер Yutu на поверхности Луны.
Поскольку проблема возникла незадолго до перехода ровера в режим гибернации на вторую лунную ночь, диспетчерам пришлось дождаться завершения режима гибернации, чтобы подтвердить проблему. Не получив связи с ровером 10 февраля, наземные диспетчеры установили контакт через два дня, но в этот момент стало ясно, что «Юйту» больше не может перемещаться по лунной поверхности, по-видимому, из-за неисправности схемы управления в его приводе. Вместо этого ученые миссии переформулировали ограниченную миссию для «Юйту» как стационарную научную платформу. Общее расстояние перехода было рассчитано как 0,114 километра. Поскольку проблема с ровером была в блоке, который также контролировал перемещение солнечных панелей по направлению к Солнцу, диспетчеры ожидали, что ровер потеряет мощность, но, похоже, ровер обменивался данными с центром управления полетом по крайней мере до начала сентября 2014 года. Посадочный модуль тем временем перешел в «режим самообслуживания» в какой-то момент в середине 2014 года, но продолжал работать в течение года. В январе 2015 года, через год после приземления, китайские СМИ объявили, что спускаемый аппарат все еще возвращает данные, начав свою 14-ю лунную ночь, что делает его самым продолжительным из функционирующих космических аппаратов на поверхности Луны. Утверждается, что спускаемый аппарат был на связи не реже одного раза в месяц вплоть до осени 2016 года и отправлял научные данные по крайней мере с одного прибора - ультрафиолетового телескопа. Китайцы также обнародовали полные наборы данных изображений посадочного модуля и ровера в январе 2016 года. Что касается «Юйту», в марте 2015 года Е Пейджянь подтвердил, что ровер неподвижен, но все еще работает. Ровер продолжал поддерживать связь, по крайней мере, до июля 2016 года, но в следующем месяце «Юйту» был официально объявлен мертвым после 31 месяца эксплуатации. По крайней мере, один прибор на посадочном модуле (ультрафиолетовый телескоп) был активен по состоянию на июнь 2018 года.