Ежегодник 1971 г
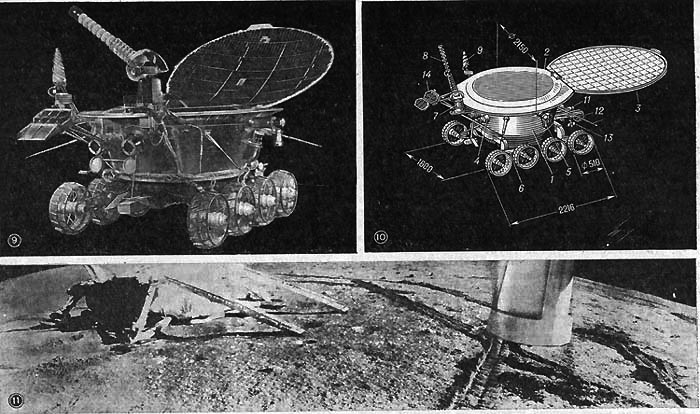
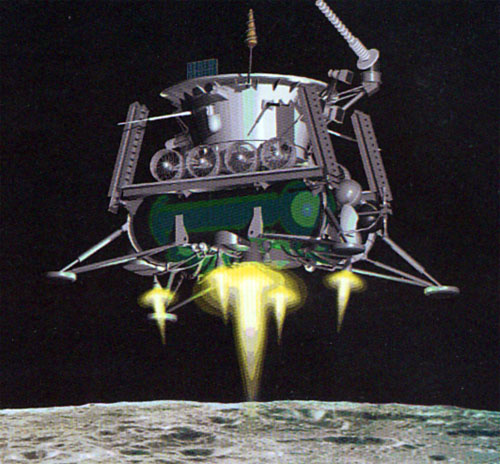
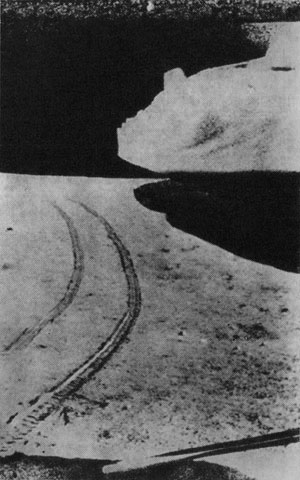
Рис. 9. Автоматический самоходный аппарат «Луноход-1». Рис. 10. Схема автоматического самоходного аппарата «Луноход-1»: 1 - герметичный приборный отсек; 2 - радиатор-охладитель; 3 - солнечная батарея; 4 - иллюминаторы для телевизионных камер; 5 - телефотокамера; 6 - блок колес шасси; 7 - привод остронаправленной антенны; 8 - остронаправленная антенна; 9 - малонаправленная антенна; 10 - штыревая антенна; 11 - изотопный источник тепловой энергии; 12 - девятое колесо; 13 - прибор для определения физико-механических свойств грунта; 14 - оптический уголковый отражатель. Рис. 11. Фрагмент панорамного снимка, выполненного 19 января 1971 г. |
17 ноября на лунную поверхность в западной части Моря Дождей совершила посадку АС «Луна-17», доставив на нее самоходный аппарат «Луноход-1» (рис. 9). В течение 10 1/2 месяцев проводился уникальный космический эксперимент с использованием лунной транспортной системы для проведения широкого комплекса научно-технических исследований.
АС «Луна-17» состоит из унифицированной посадочной ступени (ПС) и автоматической передвижной лаборатории - лунохода. Как и в полете станции «Луна-16», основными задачами ПС являлись: проведение коррекции траектории полета на участке перелета от Земли к Луне, обеспечение перехода станции на орбиту искусственного спутника Луны, формирование предпосадочной окололунной орбиты и посадка на поверхность Луны. На ПС станции «Луна-17» установлены луноход и складывающиеся трапы для его схода на поверхность Луны.
Автоматический самоходный аппарат «Луноход-1» состоит из двух основных частей: герметичного приборного отсека и колесного шасси (рис. 10). Масса лунохода - 756 кг.
Корпус приборного отсека изготовлен из магниевых сплавов. Его верхняя часть используется как радиатор-охладитель в системе терморегулирования лунохода и закрывается специальной крышкой, выполняющей двойную функцию. В период лунной ночи крышка закрывает радиатор и препятствует излучению тепла из отсека. В течение лунного дня крышка открыта, и элементы солнечной батареи, расположенные на ее внутренней стороне, обеспечивают подзарядку аккумуляторов, питающих бортовую аппаратуру электроэнергией. Крышка может быть установлена на любой угол в пределах 0-180°, что позволяет максимальным образом использовать солнечную энергию. В передней части приборного отсека расположены иллюминаторы для телевизионных камер, электрический привод подвижной остронаправленной антенны, предназначенной для передачи на Землю телевизионных изображений лунной поверхности, малонаправленная антенна, обеспечивающая прием радиокоманд и передачу телеметрической информации, научные приборы и оптический уголковый отражатель.
По левому и правому борту установлены по две панорамных телефотокамеры (причем в каждой паре одна из камер конструктивно объединена с определителем местной вертикали), четыре штыревые антенны для приема радиокоманд с Земли в другом диапазоне частот. Приборный отсек установлен на восьмиколесном шасси, которое обеспечивает передвижение автоматической лаборатории по поверхности Луны. Геометрия ходовой части, удельное давление на грунт, тяговые характеристики шасси, параметры упругой подвески и конструкция опорной поверхности колес позволяют уверенно передвигаться по поверхности с рыхлым, сыпучим слоем грунта, преодолевать крутые подъемы, переезжать через кратеры и препятствия в виде отдельных камней или гряды камней, соизмеримых с размерами ходовой части.
Самоходное шасси обеспечивает передвижение лунохода с двумя скоростями вперед и назад, повороты на месте и в движении. В состав самоходного шасси входят: ходовая часть, состоящая из четырех блоков попарно расположенных колес, блок автоматики, система безопасности движения, прибор и комплекс датчиков для определения механических свойств грунта и оценки проходимости шасси. Каждое из восьми ведущих колес имеет индивидуальный силовой привод и независимую торсионную подвеску. Внутри каждой ступицы колеса расположены электродвигатель, редуктор, тормоз, механизм для отсоединения силового привода, датчики числа оборотов колес и температуры. Поворот лунохода достигается за счет различных скоростей вращения колес правого и левого бортов и изменением направления их вращения. Торможение лунохода осуществляется переключением тяговых электродвигателей шасси в режим электродинамического торможения. Для удержания лунохода на уклонах и для его полной остановки включаются дисковые тормоза с электромагнитным управлением.
Блок автоматики обеспечивает управление движением лунохода по радиокомандам с Земли, измерение и контроль основных параметров самоходного шасси и автоматическую работу приборов для исследования механических свойств лунного грунта. Все управление движением осуществляется с помощью пяти команд движения и команды «стоп». Система управления движением, входящая в блок автоматики шасси, имеет также автоматические устройства для дозированного по времени прямолинейного движения и выполнения поворотов на заданные углы. Система безопасности движения обеспечивает автоматическую остановку лунохода при предельных углах крена и дифферента и перегрузках электродвигателей колес. При необходимости одно или несколько колес могут быть отключены от силового привода. При этом тяговые характеристики самоходного шасси остаются достаточно высокими.
Для подогрева газа, циркулирующего внутри аппарата, служит изотопный источник тепловой энергии. Рядом с ним расположены прибор для определения физико-механических свойств лунного грунта и механизм подъёма и опускания девятого колеса.
В приборном отсеке размещаются передающие и приемные устройства радиокомплекса, приборы системы дистанционного управления луноходом, система электропитания, блоки коммутации и автоматики, приборы системы обеспечения теплового режима, электронно-преобразовательные устройства научной аппаратуры.
Луноход имеет две телевизионные системы. Система малокадрового телевидения, две камеры которой расположены в передней части корпуса, предназначена для передачи на Землю телевизионных изображений местности, необходимых экипажу, управляющему с Земли движением лунохода. Вторая телевизионная система предназначена для получения панорамного изображения окружающей местности и съемки участков звездного неба, Солнца и Земли с целью астроориентации лунохода. Система состоит из четырех однотипных по устройству панорамных телефотокамер. Они расположены таким образом, что две из них обеспечивают обзор местности справа и слева от лунохода в пределах несколько более 180° в горизонтальной плоскости и 30° в вертикальной. Две другие камеры дают изображение местности и пространства в пределах 360° в вертикальной и 30° в горизонтальной плоскостях.
Поддержание необходимого теплового режима лунохода обеспечивается пассивными и активными методами терморегулирования. Уменьшение теплообмена между отдельными элементами конструкции и окружающим пространством осуществляется применением экранновакуумной теплоизоляции и специальных внешних покрытий с особыми оптическими свойствами. Путем принудительной циркуляции газа-теплоносителя между радиатором и приборным оборудованием, осуществляемой системой вентиляторов, происходит отвод тепла через радиатор в космическое пространство. В период лунной ночи для обогрева оборудования приборного контейнера специальные заслонки прекращают циркуляцию газа-теплоносителя по контуру охлаждения и направляют его в контур подогрева, где он нагревается изотопным источником. Оценка проходимости шасси производится с помощью комплекса датчиков, которые непрерывно измеряют крен и дифферент лунохода, токи тяговых электродвигателей, число оборотов и температуру колес. Длина пройденного луноходом пути определяется числом оборотов ведущих колес. Для учета их пробуксовки вносится поправка, определяемая с помощью свободно катящегося девятого колеса, которое специальным приводом опускается на грунт и поднимается в исходное положение.
Управление самоходным аппаратом осуществляет экипаж из Центра дальней космической связи. В состав экипажа входят командир, водитель, штурман, оператор и борт-инженер. На «Луноходе-1» и посадочной ступени «Луны-17» установлены флаги и вымпелы с изображением Государственного герба СССР и барельефом В. И. Ленина.
Автоматическая станция «Луна-17» с «Луноходом-1» на борту была запущена 10 ноября в 17 час 44 мин. Ее вывели на орбиту ИСЗ, а затем, используя двигатели последней ступени ракеты-носителя, направили к Луне. Проведенные 12 и 14 ноября коррекции траектории и операция торможения позволили 15 ноября вывести станцию на селеноцентрическую орбиту со следующими параметрами: высота над поверхностью Луны - 85 км; наклонение орбиты к плоскости лунного экватора - 141°; период обращения вокруг Луны - 1 час 56 мин. В дальнейшем путем сложного маневрирования станции в окололунном пространстве была сформирована предпосадочная эллиптическая орбита с высотой в периселении 19 км. 17 ноября в 6 час 41 мин был включен тормозной двигатель, и станция, совершив маневры, аналогичные маневрам АС «Луна-16», в 6 час 47 мин мягко прилунилась в прибрежном районе западной части Моря Дождей, в точке с селенографическими координатами: 38°17' с.ш. и 35° з.д. В 9 час 28 мин «Луноход-1» съехал по трапу с посадочной платформы и приступил к выполнению программы научно-технических исследований и экспериментов.
Программа предусматривала: проведение испытаний и отработку лунной транспортной системы; приобретение опыта дистанционного управления самоходным аппаратом с помощью экипажа, находящегося на Земле; изучение топографических и селенолого-морфологических особенностей района прилунения аппарата; исследование химического состава и физико-механических свойств лунного грунта; изучение радиационной обстановки на участке полета Земля - Луна, в окололунном пространстве и на поверхности Луны; исследование интенсивности и углового распределения внегалактического рентгеновского излучения и рентгеновского излучения из Вселенной от отдельных источников; лазерную локацию Луны.
Топографическое изучение местности выполнялось на основе телевизионных панорам и снимков лунного ландшафта и данных о длине пройденного пути, курсе, крене и дифференте лунохода во время движения. Для проведения научных исследований на лунной поверхности «Луноход-1» был оборудован следующим комплексом приборов: спектрометрическим прибором для анализа химического состава лунного грунта, пенетрометром для исследования его механических свойств, радиометрической аппаратурой, рентгеновским телескопом и уголковым светоотражателем для лазерной локации Луны, разработанным и изготовленным во Франции.
Для экспериментов по лазерной локации Луны используются два комплекса наземной лазерно-локационной аппаратуры. Один комплекс был создан советскими учеными и инженерами и установлен на оптическом телескопе диаметром 2,6 м Крымской астрофизической обсерватории АН СССР. Другой был разработан и изготовлен французскими учеными и инженерами и установлен на телескопе диаметром 1,05 м, расположенном в обсерватории Пик-дю-Миди в Пиринеях.
Западная часть Моря Дождей, где совершила посадку станция «Луна-17», представляет собой полого-волнистую равнину, на которой выделяется система пологих грядообразных возвышенностей с относительными высотами до 200-400 м. Полого-волнистый характер местности в этом районе был подтвержден данными, полученными высотомерной аппаратурой станции «Луна-17» на этапе спуска. Анализ телевизионных изображений местности и параметров движения лунохода в районе места прилунения показал, что «Луна-17» совершила посадку на внутреннем склоне кратерообразной котловины поперечником порядка 150-200 м. Точка посадки находится в западной части котловины, примерно на середине внутреннего склона.
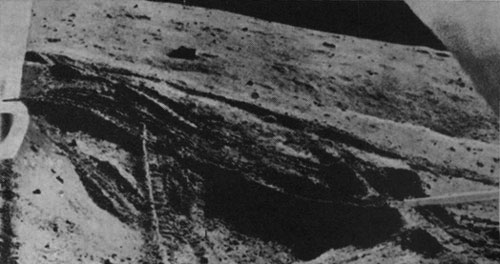
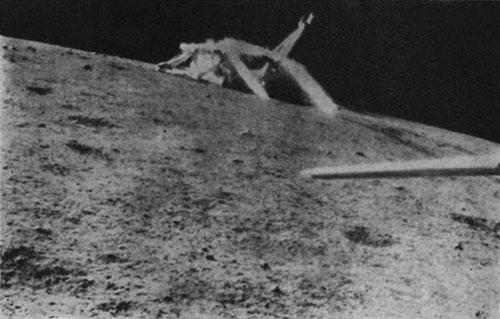
В первом сеансе движения «Луноход-1» спустился с посадочной ступени по восточному трапу и продвинулся в восточном направлении на 20 м. Движение происходило вниз по склону крутизной 5-6°. На панораме, показанной на рис. 11, видна колея на поверхности Луны, проложенная «Луноходом-1», и посадочная ступень станции. В местах разворота лунохода колеса сгребали грунт, и на панораме видна комковатая структура грунта. Мелкие камни, видимые на панораме, имеют, по всей вероятности, насыпное происхождение.
Во втором сеансе движения «Луноход-1» двигался в юго-восточном направлении и прошел в общей сложности 96 м. Луноход подошел к кратеру диаметром св. 20 м. Вокруг кратера наблюдался обильный вывал камней остроугольной формы с размерами до 0,5 м. К югу в 4-5 м от места остановки на кромке небольшого кратера (диаметр около 4 м) был обнаружен камень необычной формы - призма пяти и шестиугольного сечения, лежащая на длинной боковой грани; длина призмы 30-35 см, поперечник сечения 5-10 см, грани - плоские.
В третьем сеансе движения луноход прошел в юго-восточном направлении св. 50 м. И если во втором сеансе он прошел самую низкую точку маршрута первого лунного дня (ниже точки посадки станции примерно на 2-3 м), то в третьем сеансе движения луноход достиг уровня примерно на 1-2 м выше точки посадки станции. Продвинувшись затем дважды на небольшое расстояние, луноход остановился вблизи от бровки кратера, в котором «Луна-17» совершила посадку. За время первого этапа движения по лунной поверхности луноход прошел 197 м. 24 ноября в Море Дождей наступила ночь, в период которой луноход находился в стационарном положении. 5 и 6 декабря при приближении утреннего терминатора к району стоянки самоходного аппарата были проведены эксперименты по лазерной локации. Наземной аппаратурой Крымской астрофизической обсерватории АН СССР были посланы в сторону Луны и зарегистрированы четкие отраженные сигналы от лазерного отражателя «Лунохода-1». Аналогичный эксперимент выполнялся французскими учеными в обсерватории Пик-дю-Миди.
С наступлением лунного дня 10 декабря «Луноход-1» покинул место стоянки и начал движение в южном направлении. Предстояло провести изучение лунной поверхности на трассе протяженностью около полутора километров. На пути лунохода попадалось много кратеров и камней; одни из этих препятствий он преодолевал, другие обходил. В период лунного полдня с 14 по 17 декабря самоходный аппарат проводил исследования и эксперименты, находясь в стационарном положении, затем он опять начал движение на юг. В сеансе связи 20 декабря луноход встретил кратер диаметром около 100 м и глубиной 8-10 м и подверг его тщательному исследованию. В сеансах связи 22 и 23 декабря били выполнены все операции по подготовке аппарата к лунной ночи, которая наступила 24 декабря 1970 г. и продолжалась до 9 января 1971 г. В этот период луноход находился в стационарном положении. За второй лунный день «Луноход-1» преодолел расстояние в 1522 м, 1370 м отделяло его от посадочной платформы.
За 35 суток функционирования лунохода, включавших два периода активной работы в условиях лунного дня и лунную ночь, был получен большой объем информации о работе систем и агрегатов самоходного аппарата, его шасси, о результатах исследований Луны и космического пространства. За 14 сеансов радиосвязи, в которых аппарат передвигался и маневрировал на лунной поверхности, было пройдено 1719 м. Движение по весьма сложному рельефу с препятствиями в виде кратеров, камней, подъемов и спусков показало хорошую проходимость и маневренность лунохода. В процессе его работы получено несколько десятков изображений различных участков лунного ландшафта. По трассе движения постоянно проводились исследования физико-механических свойств поверхностного слоя. С помощью спектрометра определялось в нескольких районах содержание основных химических элементов, образующих лунную породу. Проводились также исследования космических лучей, регулярно измерялись фон внегалактического рентгеновского излучения и рентгеновское излучение из Вселенной от отдельных источников.
Уникальный космический эксперимент в районе Моря Дождей продолжался до 4 октября 1971 г.
|