Какая же сила поможет человеку завоевать космическое пространство? Оказывается, такая сила существует, и ее давно заметил человек. Это реактивная сила. Именно ее имел в виду отец русской реактивной техники гениальный К. Э. Циолковский, рассчитывая межпланетные полеты. Что же это за сила? Каков ее физический смысл?
С этой силой часто встречается наш читатель, не обращая на нее внимания. Именно эта сила вызывает удар в плечо во время выстрела из ружья, она заставляет откатываться орудие после выстрела, благодаря ее действию взлетают в воздух фейерверочные и сигнальные ракеты.
Оказывается, принципиально только реактивная сила может заставить межпланетный корабль будущего взлететь в космос, и только с ее помощью были запущены первые в истории человечества искусственные спутники Земли.
Классическое объяснение возникновения реактивной силы дал великий английский ученый Ньютон в третьем законе механики. Закон этот гласит: всякое действие встречает равное по величине и обратное по направлению противодействие.
В справедливости этого закона легко убедиться, припомнив несколько всем знакомых примеров: гребец, откидывая при помощи весел некоторые массы воды в одну сторону, заставляет тем самым двигаться лодку в противоположном направлении. Точно так же гребной винт, перемещая массы воды, заставляет идти корабль вперед.
Отметим одну особенность, В примере с лодкой «посредником» между лодкой, человеком и водой являются весла. Этот «посредник» в технике называется движителем. Им будет являться также гребное колесо парохода, гребной винт, пропеллер самолета, гусеница трактора и т. д. (Не следует путать термин движитель с двигателем. В приведенных примерах — на лодке — двигателем будет человек, на пароходе — машина, на самолете — мотор и т. д.) Постараемся запомнить эти примеры, в особенности роль «посредника» — движителя. С ним нам скоро придется встретиться.
Пример, иллюстрирующий третий закон механики, который мы привели выше, не единственный. Оказывается, что в соответствии с упомянутым законом можно получить движение и без движителя.
Вы выстрелили из ружья, пороховые газы вытолкнули заряд из ствола, а сила реакции, или реактивная сила, оттолкнула назад ваше ружье, т. е. она создала тягу, перемещающую ружье в обратную сторону движения пороховых газов. Эту тягу мы называем силой отдачи, под действием которой приклад ружья толкает нас при выстреле в плечо. Теперь возьмем ту же лодку и представим себе, что вы закрепили ваше ружье на ее корме, направив ствол в обратную сторону носа лодки, и оно непрерывно стреляет. Естественно, что после каждого нового выстрела под действием силы отдачи, т. е. реактивной силы, ружье, а вместе с ним и лодка, до сих пор стоявшая на месте, толчками будет двигаться вперед, Пока хватит запасов зарядов, ваша лодка будет двигаться. Такой принцип движения называется реактивным, а двигатели, построенные на этом принципе, т. е. вызывающие движение непосредственно, без движителя, называются двигателями прямой реакции.
Проверить действие реактивной силы можно также с помощью простого опыта. Если вы, встав лицом к корме, начнете бросать в воду камни, как толкают физкультурники ядро, то убедитесь в том, что лодка будет двигаться в сторону, обратную полету камня. Причем можно заметить, что чем большую скорость вы придаете камням при бросании, тем быстрее будет двигаться лодка.
На основании приведенных выше примеров нетрудно понять и физический смысл возникновения реактивной силы, образуемой в ракетном двигателе при выбросе из его сопла в окружающее пространство газов. Возникающие от сгорания топлива газы мгновенно расширяются и давят на стенки и дно камеры сгорания. Но так как выход для них расположен как раз против дна камеры сгорания, то вся сила давления газов сосредоточивается на нем.
Таким образом, образовавшиеся в камере сгорания ракетного двигателя газы как бы отталкиваются от ее дна и с огромной силой толкают ракету вперед, образуя так называемую тягу ракеты, в то же время сами газы выбрасываются через сопло с огромной скоростью наружу, т. е. в противоположную сторону движения ракеты. Отсюда видно, что если горючее и кислород, необходимый для его сгорания, запасены на ракете, то она может двигаться и в безвоздушном пространстве.
Все видели сигнальные ракеты или ракеты, применяющиеся для фейерверка. Они-то и являются прообразом ракет, которые полетят в космос.
Основным препятствием для космических полетов служит земное притяжение. Для того чтобы его преодолеть и выйти в пространство, где начнет преобладать притяжение планеты, на которую мы летим, нужны колоссальные количества энергии. Даже для запуска спутника весом 45 кг на орбиту, удаленную от Земли на расстояние 300-500 км, необходимо затратить энергию, соответствующую 4-5 дням работы Днепрогэса. На первый взгляд это может показаться неосуществимым. Однако уже во время второй мировой войны немецкие ракеты «Фау-2», бомбардировавшие Лондон, имели двигатель мощностью 500 000 л. с., работавший, правда, всего около одной минуты. Сейчас ракеты такого типа значительно усовершенствованы, и мощности, которые развивают их двигатели, значительно выше и измеряются миллионами лошадиных сил.
В чем же заключается особенность этих двигателей невиданной мощности? Чем они отличаются от всех известных паровых машин или дизелей?
Возьмем, например, самый совершенный авиационный поршневой двигатель. Он также развивает довольно большие мощности, компактен, не особенно тяжел. Тем не менее для космических полетов он не пригоден. Дело в том, что для его работы необходим кислород, содержащийся в атмосфере. А наша ракета предназначена для полета в пространстве, лишенном атмосферы. Что касается паровой машины или дизеля, то для их работы точно так же требуется кислород атмосферы, не говоря уже о том, что их вес на единицу развиваемой мощности весьма значителен.
Напомним еще одно важное обстоятельство. Корабль или самолет двигается потому, что гребной винт или винт самолета, вращаясь, отталкивается от воды или от воздуха и заставляет тем самым двигаться их вперед. Но ведь в космосе нет воздуха, стало быть винт, вращаясь там, не смог бы создать тяги. Поэтому единственным возможным двигателем для космических полетов является реактивный двигатель, для работы которого нет необходимости в плотной окружающей среде, т. е. в атмосфере. Правда, не все виды реактивных двигателей обладают возможностью работать в безвоздушном пространстве.
Дело в том, что всякий реактивный двигатель вызывает движение какого-нибудь аппарата в результате приложения к нему силы реакции тяги, равной количеству движения отбрасываемого вещества. Если из ракеты в единицу времени выбрасывается масса m со скоростью Vr относительно камеры сгорания, то ракета испытывает тягу Р, определяемую по формуле
Для получения большой тяги, как видно из этой формулы, надо отбрасывать большую массу какого-нибудь вещества и с наибольшей скоростью. По тому, откуда берется эта отбрасываемая масса, различают два типа реактивных двигателей: ракетные двигатели, при работе которых происходит отбрасывание вещества, находящегося в самом перемещающемся аппарате, и воздушно-реактивные, в которых отбрасывается захваченная двигателем и ускоренная внутри аппарата при помощи различных механических или тепловых устройств атмосфера, окружающая этот аппарат. Для доставки ИСЗ на его орбиту в нижних слоях атмосферы можно использовать воздушно-реактивные двигатели. В верхних слоях атмосферы могут быть использованы только ракетные двигатели. Для межпланетных кораблей ближайшего будущего единственными двигателями являются ракетные. Такими двигателями могут быть пороховые, жидкостные, атомные, ионные или фотонные. Первые два типа ракетных двигателей реально существуют и доведены до такого совершенства, что с их помощью ученые могут запускать искусственные спутники Земли. Следующие три типа ракетных двигателей являются перспективными, практическое осуществление их зависит от общего уровня развития техники будущего. Но уже сейчас разработкой атомных ракетных двигателей усиленно занимаются многие страны мира, и, видимо, очень скоро мы узнаем о полете ракеты с атомными ракетными двигателями.
В дальнейшем рассмотрим, как устроены ракетные двигатели и ракеты.
Циолковский впервые изложил научные основы реактивного движения и создал точную теорию ракеты, позволившую объективно оценить возможности этого способа перемещения. Он в аналитической форме установил связь между скоростью, приобретаемой ракетой, скоростью истечения газов из сопла двигателя, полным весом ракеты и весом несомого топлива. Эта фундаментальная формула носит имя Циолковского.
В ходе своих научных исследований Циолковский пришел к ряду замечательных выводов и доказал возможность достижения с помощью ракет на жидком топливе космических скоростей, достаточных не только для создания искусственных спутников Земли, но и для полетов к любым планетам солнечной системы.
Приоритет Циолковского в создании теории, реактивного движения, научных основ ракетной техники и планов покорения космоса неоспорим. Эти работы Циолковского были подтверждены и дополнены аналогичными научными исследованиями, появившимися много позже за рубежом, а именно: во Франции — Эно Пельтри в 1913 году, в Америке — Робертом Годдаром в 1919 году, в Германии — Германом Обертом в 1923 году и другими учеными.
Циолковский заложил прочный теоретический фундамент в новой области науки и техники. Его ученики и последователи, опираясь на помощь партии и правительства, приложили немало труда, чтобы вызвать к жизни многое из того, что предвидел Константин Эдуардович. В результате в нашей стране создана реальная научно-исследовательская, опытно-конструкторская и промышленная база для успешного развития ракетной техники.
Предстоит еще колоссальный и длительный труд в ряде отраслей науки и техники, прежде чем идеи великого русского ученого превратятся из сказочной перспективы в явь. Но развиваются эти идеи по правильному пути, и мы твердо верим, что еще нам доведется быть свидетелями первых шагов покорения человеком мирового пространства.
Наряду с учеными различных стран мира значительный вклад в создание и развитие реактивных двигателей и теории реактивного движения был сделан нашими учеными. Так, например, теория реактивного движения, разработанная выдающимися русскими учеными К. Э. Циолковским, Н. Е. Жуковским, а также И. В. Мещерским, Ф. А. Цандером и другими, стала фундаментом реактивной техники.
В данной книге нет необходимости перечислять все труды К. Э. Циолковского, они в 1955 г. опубликованы в специальном сборнике Академии наук СССР, издается собрание сочинений его трудов. Ученики Циолковского, советские инженеры и ученые, развили его идеи и усовершенствовали его схемы, вписали в историю развития реактивной техники имя своего учителя как родоначальника ракет дальнего действия и жидкостных ракетных двигателей.
На рис. 5 представлена элементарная схема ЖРД с баллонной системой подачи компонентов топлива и пиротехническим зажиганием.
ЖРД состоит из следующих основных конструктивных элементов и систем: камеры сгорания, где происходит подготовительный процесс и процесс сгорания топлива; сопла, в котором тепловая энергия продуктов сгорания преобразуется в кинетическую энергию газов, истекающих из двигателя; системы питания, обеспечивающей подачу компонентов топлива в камеру сгорания (система питания включает в себя: баки с горючим и окислителем, баллоны с сжатым инертным газом, парогазогенератор, насосы, трубопроводы, форсунки и т. д.); системы охлаждения камеры сгорания для пламенных ЖРД, в которых температура превышает 2500° К; системы управления, которая обеспечивает правильный запуск двигателя и режим его работы (сюда относятся различные краны, клапаны, редукторы, дроссели, пусковые пробивные мембраны и т. д.); системы зажигания, обеспечивающей воспламенение компонентов топлива в камере сгорания в момент запуска двигателя.
 Рис. 5. Элементарная схема ЖРД с баллонной системой подачи топлива: 1 — управляемый пневмоэлектроклапан; 2 — редуктор; 3 — баллоны с сжатым инертным газом; 4 — бак с окислителем; 5 — бак с горючим; 6 и 7 — пусковые мембраны; В — вентиль; 9— камера сгорания; 10 — форсунки; 11 — охлаждающий тракт; 12 — зажигательное устройство; 13 — сопло |
Запуск ЖРД производится с помощью управляемого пневмоэлектроклапана 1, который, открываясь, одновременно включает зажигательное устройство 12. Сжатый до 300 атм инертный газ поступает из баллонов 3 через редуктор 2, где давление понижается до 30 атм, и пусковые мембраны 6 в баки с горючим 5 и окислителем 4. Под действием этого инертного газа горючее и окислитель через мембраны 7 и вентиль 8 подаются каждый по своему трубопроводу через форсунки 10 в камеру сгорания 9. По пути в камеру сгорания один из компонентов топлива проходит по охлаждающему тракту 11 камеры сгорания и сопла. Распыление и смешение компонентов топлива происходит только в камере сгорания во избежание взрыва. Компоненты топлива подаются в камеру сгорания в заданном весовом отношении.
В результате преобразования в сопле 13 тепловой энергии газов в кинетическую энергию возникает тяга двигателя, сообщая ускорение ракете, на которой двигатель установлен.
Уже в 1931 году советским инженером Ф. А. Цандером был сконструирован, построен и испытан первый жидкостный ракетный двигатель. В те же годы состоялись успешные полеты жидкостной ракеты, сконструированной советским ученым М. К. Тихонравовым. Камеру сгорания, выдерживающую высокие температуры, изобрел в 1929 г. советский инженер П. И. Шатилов, чем ускорил создание конструкции жидкостного ракетного двигателя. Дальнейшее усовершенствование конструкции ЖРД принадлежит советским инженерам Л. С. Душкину и А. М. Исаеву. Теория жидкостных ракетных двигателей разработана Ф. А. Цандером, И. И. Кулагиным и другими советскими инженерами и учеными.
Жидкостные ракетные двигатели в подавляющем своем большинстве могут быть либо с насосной системой подачи компонентов топлива в камеру сгорания, либо с баллонной системой подачи. Вторая является наиболее простой и применяется для двигателей сравнительно небольших ракет. Первая применяется в ракетных двигателях дальнего действия.
Выбор конкретной системы подачи топлива ракетного двигателя и ее составных частей определяется прежде всего назначением двигателя, его размерами, топливом, тягой, характером полета и продолжительностью работы, а также общими требованиями простоты конструкции, легкости изготовления, удобства эксплуатации и, главное, минимального веса.
Жидкостные ракетные двигатели работают или на жидких компонентах топлива или на одном жидком, применяемом в качестве горючего, а другом газообразном, используемом в качестве окислителя.
В качестве примера реактивного двигателя с насосной системой подачи топлива в камеру сгорания рассмотрим ЖРД стратосферной ракеты.
К настоящему времени известно несколько типов высотных стратосферных ракет.
Чтобы пояснить устройство, а также принцип действия ЖРД стратосферной ракеты, приведем в качестве примера ЖРД, применявшийся в первой ступени стратосферной двухступенчатой ракеты (рис. 6), вторая ступень которой в 1954 г. достигла высоты в 425 км.
Принципиальная схема такого ЖРД с основными агрегатами показана на рис. 7. Этот двигатель работает на двухкомпонентном топливе, состоящем из обычного этилового спирта 75% крепости (горючее) и жидкого кислорода (окислитель), которые хранятся в двух отдельных больших баках. Запас топлива на ракете достигает свыше 9 т, что составляет почти 5/6 общего веса ракеты. Как видно из приведенного выше рис. 7, по объему топливные баки составляют большую часть всего объема ракеты. Несмотря на такое большое количество топлива, его хватает только на 75-90 секунд работы двигателя, так как такой двигатель расходует свыше 125 кг топлива в секунду, развивая тягу в 25 т (на земле). Скорость истечения газов из сопла двигателя достигает более 2000 м/сек.
Как видно из рис. 7, основными частями двигателя являются шаровидная камера сгорания 4, реактивное сопло 1, парогазогенератор, турбонасосный агрегат для подачи топлива и система управления. Продукты сгорания расширяются в сопле двигателя до давления на выходе, равного 0,8 кг/см2, и приобретают при этом большую скорость. Диаметр камеры сгорания в наиболее широкой части ее равняется 950 мм. Диаметр горловины сопла 410 мм, диаметр выходного сечения 740 мм. Длина двигателя составляет 1790 мм. Вес камеры сгорания с соплом 420 кг. В днище камеры сгорания расположено 18 горелок (форкамер) 3, разрез камеры показан на рис. 8. Кислород, подаваемый насосом 16, поступает внутрь горелок через трубопровод 5 в центральные форсунки, а спирт, выходящий из рубашки охлаждения, — через кольцо маленьких форсунок вокруг каждой горелки. Такая конструкция форкамер обеспечивает достаточно хорошее распыление и перемешивание топлива, необходимые для осуществления полного сгорания за то очень короткое время, пока топливо находится в камере сгорания (сотые доли секунды).
 Рис. 6. Двухступенчатая высотная ракета  Рис. 7. Принципиальная схема жидкостного ракетного двигателя: 1 — сопло; 2 — система подачи горючего для внутреннего охлаждения; 3 — форкамера; 4 — камера сгорания; 5 — труба подвода жидкого кислорода к форкамерам; 6 — главный спиртовой клапан горючего; 7 — труба подвода горючего к рубашке охлаждения; 8 — баллоны высокого давления; 9 — бачок катализаторов; 10 — редуктор давления воздуха; 11 — реактор; 12 — бак перекиси водорода; 13 — главный клапан окислителя; 14 — насос горючего; 15 — турбина; 16 — насос окислителя; 17 — труба подачи парогаза в турбину; 18 — труба для отвода горючего в насос при остановке двигателя |
Как следует из самого названия, в камере сгорания происходит сгорание топлива, т. е. преобразование химической энергии топлива в тепловую, а в сопле — преобразование тепловой энергии продуктов сгорания в кинетическую энергию струи газов, вытекающих из двигателя в атмосферу.
 Рис. 8. Форкамера двигателя стратосферной ракеты |
Давление в камере сгорания порядка 16-17 атм, а температура достигает 2400-2500° С, вследствие чего в камере сгорания возникает большая теплонапряженность, т. е. в ней выделяется огромное количество тепла в единицу времени. Камера сгорания ЖРД по теплонапряженности значительно превосходит все другие известные в технике топочные устройства — топки паровых котлов, цилиндры двигателей внутреннего сгорания, камеры сгорания воздушно-реактивных двигателей и др. Для сравнения скажем, что в камере сгорания ЖРД в секунду выделяется такое количество тепла, которое достаточно для того, чтобы вскипятить около 600000 кг воды! Поэтому неохлаждаемые ракетные двигатели могут работать только в течение 25 секунд (Примеч. - См. Д. Саттон, Ракетные двигатели, Москва, Издательство иностранной литературы, 1952, стр. 150.).
Для того чтобы камера сгорания при таком огромном количестве выделяющегося в ней тепла не вышла из строя, необходимо интенсивно охлаждать ее стенки, а также и стенки сопла.
Охлаждение двигателя осуществляется следующим образом.
Основная масса спирта, прежде чем попасть в форсунки, по трубопроводам 7 (см. рис. 7) подается в рубашку охлаждения, образованную двойными стенками камеры и сопла. Двигаясь со значительной скоростью по этой рубашке, спирт отбирает тепло от внутренних стенок камеры и сопла и охлаждает их. Эта система охлаждения, предложенная еще Циолковским, выгодна также и потому, что тепло, отведенное от стенок, не теряется и снова возвращается в камеру. Но одного только наружного охлаждения стенок двигателя оказывается недостаточно, и для понижения температуры стенок одновременно применяется охлаждение их внутренней поверхности. Для этой цели стенки в ряде мест имеют небольшие отверстия 2, расположенные в нескольких кольцевых поясах, и через эти отверстия внутрь камеры и сопла поступает спирт (около 0,1 от общего его расхода). Холодная пленка этого спирта, текущего и испаряющегося на стенках, предохраняет их от непосредственного соприкосновения с пламенем факела и тем самым снижает температуру стенок. Несмотря на то, что температура газов, омывающих изнутри стенки, достигает 2500°С, температура внутренней поверхности стенок, как показали испытания, не превышает 1000° С.
Сжатие и подача топлива в двигателе производятся центробежными насосами 16 и 14. Для привода насосов служит парогазовая турбина 15. Турбина и два насоса, объединенные общим валом, образуют турбонасосный агрегат. Мощность турбонасосного агрегата 465 л. с., вес 160 кг.
Необходимый для работы турбины парогаз вырабатывается в парогазогенераторе путем разложения концентрированной перекиси водорода H2O2. При разложении перекиси водорода выделяется количество тепла, достаточное для нагрева продуктов разложения до 400-500° С (в зависимости от концентрации перекиси водорода). Надежное и быстрое разложение перекиси водорода происходит в присутствии катализатора. Таким катализатором служит концентрированный раствор перманганата калия KMnO4.
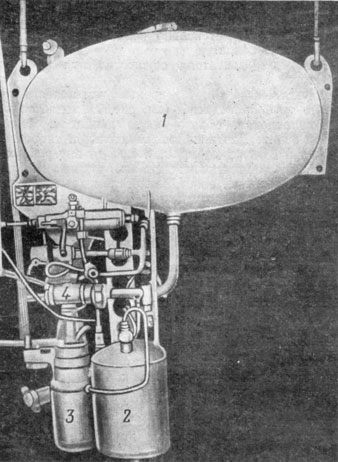 Рис. 9. Парогазогенератор стратосферной ракеты: 1 — бак перекиси водорода; 2 — реактор; 3 — бачок с раствором перманганата; 4 — редуктор |
Парогазогенератор (рис. 9) включает в себя бак перекиси водорода 1 и бачок с раствором перманганата 3. Эти вещества подаются в реактор 2 путем вытеснения их из баков сжатым воздухом. Запас сжатого воздуха помещается в баллонах 8 (на рис. 7). Перед поступлением в баки парогазогенератора давление воздуха снижается в редукторе 4. В парогазогенераторе вырабатывается в секунду 2 кг парогаза, что обеспечивает необходимую мощность турбины. Вес парогазогенератора со всей необходимой арматурой составляет 148 кг.
Таким образом, ЖРД подобной стратосферной ракеты относительно прост, в особенности при сравнении его с обычными поршневыми авиационными двигателями. В силовой схеме этого ЖРД (как, впрочем, и других ЖРД) почти полностью отсутствуют движущиеся части. Правда, по сравнению с другими ЖРД этот двигатель имеет сложную систему управления и регулирования.
Как же работает такой двигатель? Чтобы ответить на этот вопрос, начнем с запуска.
Так как смесь кислорода со спиртом не является самореагирующим топливом, т. е. не может самовоспламениться, то для начала горения необходимо предусмотреть какую-либо систему зажигания. В данном типе ЖРД система зажигания состоит из электрозапального факела, с помощью которого зажигаются пиропатроны, закрепленные на плоскости вращающегося круглого столика, установленного внутри камеры сгорания так, что реактивная сила вытекающих из них газов заставляет этот столик вращаться. Благодаря этому вращению раскаленные продукты сгорания пиропатронов равномерно заполняют камеру двигателя и прогревают ее. При достижении необходимого прогрева (спустя 2-3 секунды после начала запуска) перегорает магниевая полоска, расположенная в самом недоступном для прогрева месте камеры. Это является сигналом к продолжению запуска. Посредством электропневматической системы приоткрываются на 2-3 мм главный спиртовой клапан 6 (см. рис. 7) и главный клапан окислителя 13. Спирт и кислород самотеком начинают поступать в камеру сгорания в сравнительно небольших количествах. Топливо, попадающее в двигатель, воспламеняется от горячих пороховых газов, и горение становится более интенсивным. Через 2-3 секунды достигается устойчивое горение топлива. Вслед за этим можно увеличивать подачу топлива. Для этого оператор, запускающий ракету, с помощью электропневматической системы включает в работу парогазогенератор и турбонасосный агрегат.
Пары воды и газообразного кислорода, вырабатываемые парогазогенератором, приводят во вращение колесо турбины и затем выбрасываются в атмосферу. Мощность турбины затрачивается полностью на привод обоих топливных насосов (кислородного и спиртового). Эта мощность значительна — при 4000 об/мин колеса турбины она достигает 500 л. с.
Через 1-2 секунды после начала работы турбонасосного агрегата расход топлива в камере сгорания достигает номинального значения 125 кг/сек, тяга возрастает до 25 т, и ракета взлетает. Таким образом, от момента зажигания запального факела до того, как двигатель разовьет полную тягу, проходит всего несколько секунд.
Интересно отметить, что к моменту выключения двигателя, т. е. приблизительно через 70 секунд полета стратосферной ракеты по пологой траектории, ее скорость полета достигала примерно 5500 км/час, т. е. 1525 м/сек. В этот момент двигатель развивал мощность почти в 600000 л. с.
Не менее интересной технической характеристикой этого ЖРД является его ничтожный вес по сравнению с развиваемой им тягой. При весе двигателя около 1000 кг его тяга достигает 25 т, так что удельный вес двигателя, т. е. вес, приходящийся на единицу тяги, равен всего только 1000/25 000=0,040 кг/кг (Примеч.- К. А. Гильзин, От ракеты до космического корабля, Москва, Оборонгиз, 1954.). Для сравнения укажем, что обычный поршневой авиационный двигатель имеет удельный вес 1-2 кг/кг, т. е. в 25 раз больший. Весьма важно также и то, что удельный вес ЖРД не изменяется при изменении скорости полета, тогда как удельный вес поршневого двигателя быстро растет с ростом скорости в связи с уменьшением тяги, развиваемой поршневым двигателем. К настоящему времени осуществлено большое количество разнообразных схем ЖРД, которые характеризуются следующими особенностями:
1. Компоненты топлива подаются в камеру сгорания одновременно, и горение продолжается непрерывно.
2. Протекание рабочего процесса не зависит от условий внешней среды, поэтому ЖРД могут развивать тягу как в сравнительно плотной атмосфере, так и в безвоздушном пространстве.
3. Величина развиваемой двигателями тяги не зависит от скорости движения аппарата. С увеличением высоты полета тяга возрастает, достигая максимально возможной для данных размеров двигателя величины в пустоте; максимальную тягу двигатель может развить за очень малый промежуток времени.
4. Охлаждающей жидкостью является один из компонентов топлива, в большинстве случаев окислитель, весовой секундный расход которого для некоторых составов топлива значительно превышает расход горючего; тепло, воспринимаемое окислителем, вносится им вновь в камеру сгорания, поэтому потери при отдаче тепла стенкам незначительны.
5. Объем камер сгорания незначительный. Удельный вес двигательной установки невелик, порядка 0,04 кг веса/кг тяги.
Этим двигателям свойственны и недостатки:
1. Большой весовой секундный и удельный расход топлива, значительно превышающий удельный расход топлива ВРД (воздушно-реактивного двигателя), а именно порядка 18 кг веса/кг тяги, что определяет сравнительно малое время действия (в большинстве выполненных конструкций в пределах одной минуты).
2. Агрессивность к металлам компонентов топлива вызывает затруднения при их хранении и использовании.
3. Сложность осуществления и регулирования подачи компонентов топлива и систем зажигания.
Другим типом ракетных двигателей, который применяется в настоящее время в ракетах для исследования верхних слоев атмосферы и может быть использован при запуске ИСЗ, является пороховой ракетный двигатель (сокращенно ПРД). Такой двигатель издавна используется в боевых пороховых ракетах. Следует отметить, что русские пороховые ракеты по своим тактическим свойствам всегда значительно превосходили иностранные образцы. Уже в 1815 году талантливый офицер русской армии А. Д. Засядко приступил к созданию боевых ракет. Ракеты генерал-майора А. Д. Засядко использовались в бою и показали хорошую маневренность, дальнобойность и меткость, обеспечившие им значительный боевой успех. В середине 19-го века ракеты значительно усовершенствовал генерал-лейтенант К. И. Константинов, талантливейший изобретатель и ученый. Так, им были значительно усовершенствованы станки для производства ракет, устройства для пуска ракет и повышены боевые свойства самих ракет. Дальнейшее развитие пороховых ракет было в центре внимания русских и советских ученых. Широко известно, что прославленные гвардейские минометные части покрыли советское реактивное оружие неувядаемой славой.
 Рис. 10. Пороховой ракетный двигатель: 1 — корпус ракеты; 2 — камера сгорания; 3 — сопло двигателя; 4 — заряд пороха (пороховые трубки); 5 — диафрагма; 6 — передний воспламенитель; 7 — задний воспламенитель; 8 — отверстия решетки |
Пороховой ракетный двигатель (рис. 10) является самым простым по своему устройству из всех известных нам типов ракетных двигателей. Основными конструктивными элементами его являются: корпус 1, камера сгорания 2, сопло 3, заряд пороха 4 и диафрагма 5. Так как, в отличие от других реактивных двигателей, в ПРД весь запас топлива сосредоточен в самой камере сгорания, то и размеры ее определяются количеством содержащегося в ней пороха, необходимого для обеспечения расчетной дальности полета ракеты. Сопло 3, как и в любой ракете, предназначено для преобразования тепловой энергии пороховых газов в кинетическую энергию, которая определяет величину реактивной силы. Заряд пороха 4 состоит из пороховых трубок, или шашек, могущих иметь различную форму и плотность. При выборе формы, плотности и размеров пороховых шашек руководствуются необходимостью обеспечить более продолжительное их горение и постоянство давления в камере сгорания при переменном ее объеме. Диафрагма с отверстиями 5 удерживает пороховые шашки в камере в заданном положении. Передний воспламенитель 6 обеспечивает условия равномерного и надежного воспламенения всего порохового заряда, а задний воспламенитель 7 — начало воспламенения пороха. Дно камеры сгорания (отверстия решетки) 8 является местом приложения основной составляющей тяги.
Существуют два основных типа пороховых зарядов: с горением по части поверхности и по всей поверхности. В зарядах первого типа часть внешней поверхности покрывается веществом, препятствующим горению; вследствие этого горение такого заряда может происходить только по поверхности, не покрытой этим веществом. Заряды с горением по части поверхности горят, как сигарета, от одного конца до другого. Двигатели с этими зарядами обычно имеют большую длительность работы, чем с зарядами второго типа. Данные двигателей с зарядами обоих типов приведены в табл. 2. Некоторые заряды имеют частично ограниченную поверхность горения; в этих случаях химический состав, препятствующий горению, наносится лишь на некоторые грани заряда.
В процессе горения порохового заряда в камере сгорания давление возрастает от 100 до нескольких сотен атмосфер, а температура при этом превышает 2000° С. Поэтому камеру сгорания ПРД рассчитывают на высокие давления, в результате чего растут весовые характеристики двигателя, так как стенки ее приходится делать весьма прочными.
Растрескивание или разламывание пороховых шашек в процессе горения влечет за собой увеличение поверхности горения, повышение газообразования, а следовательно, и резкое местное возрастание давления, что может привести к взрыву камеры сгорания.
Нитроглицериновые пороха, применяемые в ПРД, обеспечивают скорость истечения газов порядка 2700 м/сек.
Порох в камере сгорания сгорает за время от нескольких десятых долей секунды до 100 секунд.
Таблица 2
(Примеч.- Дополненная автором таблица заимствована из книги Д. Саттон. Ракетные двигатели. Издательство иностранной литературы, 1952, стр. 287 (перевод с американского издания).)Сравнение основных типов пороховых ракетных двигателей
| Характеристика | Заряд с горением по всей поверхности | Заряд с горением по части поверхности |
| Тяга в кг | От 200 до 27000 | От 50 до 2500 |
| Продолжительность горения в сек. | От 0,05 до 10 | От 3 до 100 |
| Полный импульс в кг/сек | От 10 до 90000 | От 700 до 35000 |
| Область применения | Артиллерийские, авиационные, зенитные, ракетные снаряды, планирующие бомбы и сигнальные ракеты и т. д. | Стартовые двигатели, бустерные двигатели, высотные ракеты и последняя ступень для запуска искусственного спутника Земли |
| Вес в кг | От 1,3 до 900 | От 9 до 600 |
Поверхность горения является важнейшим фактором всех пороховых двигателей, обусловливающим величину их тяги. Так как тяга двигателя равна произведению массы вытекающих в секунду газов на скорость их истечения, то получить большую тягу, очевидно, можно, увеличив вес вытекающих в секунду газов. В пороховом двигателе этого можно достигнуть увеличением поверхности горения. В свою очередь небольшую тягу при соответственно большей продолжительности работы можно получить, если поверхность горения мала. При данной величине камеры сгорания изменение поверхности горения можно осуществить только путем изменения геометрической формы и расположения пороховых зарядов. На рис. 11 показано несколько форм пороховых шашек ракетного заряда, применяя которые можно в известных пределах регулировать закон образования газов по времени.
В двигателях с горением заряда по части поверхности заряд обычно занимает всю камеру сгорания и горит только по торцовой поверхности (рис. 11, а). Вследствие этого тяга оказывается пропорциональной величине площади поперечного сечения камеры, а продолжительность горения — пропорциональной длине заряда. Этот тип заряда позволяет использовать объем камеры сгорания наиболее полно. Заряды с горением по части поверхности имеют почти постоянную поверхность горения.
Заряды с горением по всей поверхности обычно состоят из одного или нескольких цилиндров с кольцевым или специально профилированным поперечным сечением, как это показано на рис. 11, б. В случае применения полых цилиндрических шашек поверхность горения имеет почти постоянную величину, так как в этой шашке выгорание внешней цилиндрической поверхности приводит к уменьшению, а выгорание внутренней поверхности — к такому же увеличению горящей поверхности. Таким образом, изменение величины горящей поверхности происходит только из-за уменьшения поверхности торцов. Если шашка имеет большую длину, то влияние торцов на общую поверхность горения очень незначительно, и можно считать, что поверхность горения практически остается постоянной.
 Рис. 11. Различные типы пороховых ракетных зарядов: а — с горением заряда по части поверхности; б — с горением заряда по всей поверхности; в — многошашечный заряд; г — звездообразная форма заряда |
В некоторых случаях, например для получения большой скорости ракеты, необходимо бывает добиться быстрого сгорания пороха (за 0,1-0,3 секунды). В таких случаях увеличивают поверхность шашек и уменьшают их толщину. Заряд делают многошашечным (рис. 11, в). Применяются и другие более сложные формы шашек, например, звездообразные, обеспечивающие нужное изменение горящей поверхности (рис. 11, г),
В ряде случаев требуется получить заряд с малой поверхностью горения, но горящий продолжительное время (десятки секунд). Это необходимо, например, для пороховых аккумуляторов давления. Для замедления горения применяют так называемые бронированные шашки. В этих шашках часть поверхности пороха покрывается пластмассой, которая не горит сама и предохраняет от загорания покрытую ею поверхность шашки.
Пороховые ракетные двигатели имеют следующие отличительные черты и особенности:
а) развивают большой импульс в очень короткое время — в десятые доли секунды;
б) имеют большую скорость горения пороха (20— 25 м/сек), в результате чего они, как правило, кратковременного действия;
в) имеют большое отношение тяги к первоначальному весу;
г) горючее двигателей имеет малую теплотворную способность — 800-900 ккал/кг;
д) просты в изготовлении и в обращении.
Вследствие незначительного времени работы ПРД пороховые ракеты в большинстве случаев имеют малые дальности полета. Пороховые ракеты используются также в качестве стартовых ракет (бустеров).
В связи с разработкой новых типов порохов и особых конструкций пороховых ракет и других ракет, работающих на твердом топливе, в печати появлялись сообщения о применении таких двигателей в качестве третьей, последней ступени ракеты-носителя спутника Земли (Примеч.- Американский журнал «Авиэйшн уик», том 24, №13, 1956, март 26, стр. 33-34.), а также в качестве основного двигателя для ракет, предназначенных для исследования верхних слоев атмосферы. Так, в апрельском номере английского журнала «Nature» («Природа») за 1956 г. (в т. 177, № 4510 на стр. 643-645) сообщалось, что английское королевское общество межпланетных сообщений совместно с министерством снабжения (ведающего всеми разработками и строительством управляемых и неуправляемых боевых ракет) предполагает принять участие в исследовании с помощью ракет верхних слоев атмосферы в течение Международного геофизического года и что для этой цели будет построена одноступенчатая неуправляемая ракета с двигателем на твердом топливе, работающем около 30 секунд. Сообщаются следующие тактико-технические характеристики этой ракеты: длина ракеты — 7-8 м, диаметр — 0,44 м. Стартовый вес свыше 1130 кг, причем основная часть веса приходится на топливо. Полезная нагрузка (приборы научных наблюдений) составит 68 кг. Максимальная высота подъема 167 км, а у последующих вариантов до 213 км. Так как ракета будет неуправляемой, то она может сильно отклоняться от намеченной траектории. Этот вопрос предполагалось выяснить во время испытаний ракеты на полигоне Вумера в Австралии. При выявлении значительных отклонений ракеты от намеченной траектории на ней предполагали дополнительно установить двигатель-ускоритель или небольшой ракетный двигатель для придания ракете вращения вокруг ее продольной оси в течение первых 5 секунд полета.
Примеры использования пороховых двигателей в третьей ступени ракет-носителей ИСЗ будут нами приведены ниже при описании возможных конструкций ракет-носителей и их запуска на орбиту ИСЗ.
Широко распространенными в авиации и боевых ракетах реактивными двигателями являются различные типы воздушно-реактивных и турбореактивных двигателей, которые могут работать только в атмосфере. Для целей запуска ИСЗ и межпланетных кораблей они могут быть использованы лишь при движении в нижних слоях атмосферы. Для осуществления полетов в верхних слоях атмосферы они неприемлемы, поэтому мы их рассматривать не будем и перейдем к краткому ознакомлению с ракетными двигателями, которые призваны совершить переворот в реактивной технике. Они еще не созданы, но могут быть созданы в самое ближайшее время. Безусловно, наиболее выгодным двигателем для полета в космическое пространство явится двигатель, использующий атомную энергию.
Как уже говорилось, величина скорости отбрасываемой реактивным двигателем массы может служить мерой качества реактивного двигателя. В атомных реактивных двигателях величина этой скорости в 3-4 раза больше, чем у самых совершенных современных жидкостных реактивных двигателей.
В рассмотренных нами выше жидкостных и пороховых ракетных двигателях источником энергии, создающим большие скорости истечения газов, являлась химическая реакция компонентов топлива. Источник энергии атомного двигателя гораздо мощнее, это процесс расщепления атомного ядра. Но сам этот процесс, как известно, не сопровождается образованием каких-либо газов, а, как мы уже говорили, тяга реактивного двигателя зависит от скорости вылетающих из сопла ракетного двигателя газов и от их массы. Следовательно, и в случае использования атомной энергии необходимо иметь какое-либо вещество (посредник), отбрасывая которое с большой скоростью, атомный двигатель сможет создать тягу. В качестве такого посредника можно использовать, например, воду.
В атомном котле она будет испаряться. Если же удастся найти материалы для деталей двигателя, которые могли бы выдержать температуру более 3000°С, то воду можно заставить еще и разлагаться на водород и кислород. При дальнейшем повышении температуры молекулы водорода и кислорода будут распадаться на атомы, что может увеличить объем получающегося газа почти вдвое. Ученые подсчитали, что по сравнению с обычным жидкостным реактивным двигателем, использующим керосин и кислород, при прочих одинаковых условиях, у атомного двигателя скорость истечения образовавшихся газов может доходить до 12 км/сек, а следовательно, и его тяга будет в 4 раза больше.
Что же это даст? Это примерно в 4 раза уменьшит расход газа, необходимого для получения данной тяги, уменьшится вес «посредника», а следовательно, и вес самой ракеты, что приведет к уменьшению необходимой для движения тяги, зависящей от веса ракеты, и, стало быть, запасы «посредника» можно будет еще более ограничить.
Но при осуществлении такого ракетного двигателя придется столкнуться с необходимостью решить много сложнейших научных и технических проблем.
 Рис. 12. Схема атомной установки с ракетным двигателем: 1 — резервуар; 2 — «посредник» (жидкость); 3 — насос; 4 — реактор; 5 — реактивное сопло |
В новейшей специальной литературе указывается ряд подробностей теоретической разработки проблем применения атомных силовых установок в ракетах. Вследствие того, что сила тяги в ракете прямо пропорциональна ![]() , где M — среднее значение молекулярного веса истекающего газа, для ракет с атомной силовой установкой наиболее выгодно применять в качестве «посредника» легкие газы, как, например, водород или аммиак. На ракете они должны находиться в жидком виде, чтобы занимать меньший объем.
, где M — среднее значение молекулярного веса истекающего газа, для ракет с атомной силовой установкой наиболее выгодно применять в качестве «посредника» легкие газы, как, например, водород или аммиак. На ракете они должны находиться в жидком виде, чтобы занимать меньший объем.
На рис. 12 показана упрощенная схема атомного реактивного двигателя.
«Посредник» (жидкость) 2 из резервуара для хранения его 1 подается в реактор 4 с помощью насоса 3. Нагретые в атомном реакторе до высокой температуры газы с громадной скоростью вырываются из сопла 5, создавая тем самым тягу двигателя.
На рис. 13 показано схематическое устройство трехступенчатой ракеты с атомной силовой установкой.
По мнению большинства специалистов, задачи, которые необходимо разрешить для успешного применения атомной энергии в ракетных силовых установках, сводятся к следующему:
— разработка конструктивных материалов, способных выдерживать высокие температуры без коррозии и изменения своих физико-химических свойств под воздействием мощных радиоактивных излучений;
— повышение теплоотдачи ядерного реактора;
— создание эффективного, легкого и небольшого по габаритам экрана для предохранения обслуживающего персонала от воздействия проникающей радиации;
— разработка эффективного дистанционного автоматического управления ракетным двигателем и системы его обслуживания;
— снижение стоимости изготовления и эксплуатационных расходов ракетных атомных силовых установок.
Велики трудности, которые придется преодолеть при создании такого двигателя. Однако вспомним, как немного времени прошло с момента первого практического применения атомной энергии, и тем не менее в СССР с 1954 г. работает первая в мире атомная электростанция. По директивам XX съезда КПСС по шестому пятилетнему плану развития народного хозяйства в СССР строятся новые крупные атомные электростанции и спущен на воду ледокол «Ленин» с атомным двигателем. Развитие техники идет такими крупными шагами, что создание ракетного атомного двигателя, учитывая успехи советской атомной промышленности, дело совсем уже не такого далекого будущего.
Когда будет создан ракетный атомный двигатель, дело освоения космоса значительно продвинется вперед, и сейчас даже трудно предугадать масштабы, в которых оно развернется.
Как было показано выше, увеличение скорости отбрасываемых масс позволяет увеличить тягу, уменьшить запасы посредника и вес ракеты. Однако и в жидкостных, пороховых и атомных двигателях неограниченно увеличивать тягу за счет увеличения скорости отбрасываемых масс не удается из соображений прочности материалов, из которых изготовляются камеры сгорания. Конечно, ученые работали и работают над тем, чтобы повысить жаропрочность сплавов и керамических материалов, однако эта возможность ограничена. При определенных температурах все вещества начинают плавиться или испаряться. Применение охлаждения камеры сгорания не может вполне решить этой проблемы, так как охлаждение стенок камеры не должно сопровождаться одновременным понижением температуры исходящих газов (во всяком случае до известного предела), что технически трудно достижимо.
Были предложены двигатели, основанные на совершенно ином принципе, позволяющем резко повысить скорости газа, истекающего из сопла двигателя газа. Для этого предложили использовать применяемые в атомных физических лабораториях ускорители, в которых под действием электрического поля заряженные частицы приобретают колоссальные скорости. В качестве «посредника» в таком двигателе предполагают использовать элементы цезий или рубидий. Их пары, проходя через платиновую сетку, ионизируются, а затем положительные и отрицательные ионы приобретают раздельно ускорение. Выходя из ускорителя, они имеют одинаковую скорость, при встрече взаимно нейтрализуются и образуют быстролетящие молекулы газа.
Таким образом, для такого двигателя необходимо иметь источник электрической энергии. На космической ракете таким источником могут быть фотоэлементы, преобразующие солнечную энергию в электрическую.
Ионные двигатели, питающиеся от фотоэлектрической батареи, будут иметь довольно низкую тягу из-за большого рассеивания молекул и недостаточной мощности батареи. Однако этой тяги в космосе вполне будет достаточно для того, чтобы маневрировать ракетой и создавать большие скорости полета после того, как ракета преодолеет силу притяжения Земли. Такие двигатели, кроме всего прочего, требуют очень небольших запасов топлива; например, для полета с межпланетной стаыции, находящейся вблизи Земли, на орбиту Марса (на расстоянии 56000000 км) для 100-т ракеты может потребоваться всего 10 т топлива. Ионная ракета может достичь такой скорости, что за один год пролетит 175 млн. км.
Ионный реактивный двигатель, несмотря на то, что им можно будет пользоваться после преодоления тяготения Земли, интересен тем, что в нем не приходится сталкиваться с труднейшими температурными проблемами, а также потому, что он дает новые возможности увеличения скорости отбрасываемых масс, а следовательно, и тяги. Кроме того, такой способ для ракет с людьми не требует каких-либо сложных мер в отношении их защиты от радиации.
Для получения значительной тяги ионно-реактивных двигателей требуется мощный источник электроэнергии, необходимый для ускорения большой массы ионов «посредника». Получение больших мощностей электроэнергии с помощью фотоэлементов, улавливающих радиацию Солнца, не представляется практически возможным. Поэтому представляет большой интерес сочетание двух двигателей — атомного, энергия которого затрачивается на работу электрического генератора, и ионно-реактивного, создающего тягу ракеты. В условиях ракеты запасы веществ должны быть ограничены, и непроизводительная их потеря не допускается, поэтому атомный двигатель должен работать по «замкнутому циклу». При этом рабочее вещество — теплоноситель, воспринимающее тепловую энергию в атомном реакторе, переносится в турбореактивный двигатель (например, паровую турбину). Здесь тепловая энергия, накопляемая теплоносителем, превращается в механическую энергию. Затем теплоноситель направляется обратно в атомный реактор, совершая процесс передачи энергии атомной реакции по замкнутому контуру без потери вещества — теплоносителя.
Турбореактивный двигатель приводит во вращение электрический генератор, энергия которого направляется в ускоритель ионов «посредника». Ионы «посредника», вылетающие из ускорителя с большой конечной скоростью, выбрасываются сопловым аппаратом наружу в окружающее ракету пространство, создавая тем самым реактивную тягу. По существу атомно-ионный двигатель представляет собой сочетание атомной электростанции с ионным реактивным двигателем. Реализация подобной системы вполне возможна, о чем убедительно говорят достижения в области создания атомных двигателей для подводных лодок, кораблей и самолетов. Однако здесь встречаются огромные технические трудности, связанные с необходимостью существенного сокращения веса и габаритов атомной электростанции для ракет. Существующие атомные электростанции еще слишком громоздки, имеют ряд сложных переходных устройств для превращения одних видов энергии в другие, а коэффициент полезного действия этих станций еще низок.
 Рис. 14. Схема атомно-ионного двигателя: 1 — трубка подачи газообразных распыленных частиц; 2 — к вакуум-насосу; 3 — к теплообменнику; 4 — к электрогенератору; 5 — к пульту управления; 6 — генератор ионов; 7 — аппаратура управления; 8 — вибратор высокого напряжения; 9 — электронная пушка |
Другой проект атомно-ионного двигателя, основанного на принципе местного ускорителя элементарных частиц (рис. 14), был предложен сотрудником американской авиационной фирмы «Гудиебр эйркрафт» Даррелом Ромиком (Примеч.- Американский журнал «Industrial and Chemistry» № 8, 1956, стр. 15-16.).
По принципу Ромика в двигатель вводятся распыленные частицы (газ), где они подвергаются бомбардировке электронами из электронной пушки. Неионизированные частицы газа непрерывно удаляются из двигателя вакуум-насосом, а ионы посредством электродов и сеток электронной пушки направляются в ускоритель. Здесь мощные электроды, питаемые током высокого напряжения, до момента выхода ионов из двигателя разгоняют их несколькими последовательными толчками. Размещение электродов и фазы тока подобраны так, чтобы скорость частиц непрерывно возрастала. Истекающий из двигателя поток ионов и создает реактивную тягу.
Для того чтобы заряд, возникающий в пространстве при истечении ионов, не нейтрализовал тягу, рядом с основным соплом расположена электронная пушка, которая выбрасывает назад электроны, полученные при образовании ионов. Источником энергии для работы ускорителя может служить ядерный реактор или Солнце. Для полетов в пределах орбит, близких к Солнцу, вплоть до Марса можно использовать лучистую энергию Солнца; это значительно облегчит двигатель, так как при получении энергии от ядерного реактора требуется система защиты с большим весом. Как уже говорилось выше, ионный двигатель очень мало расходует распыленных частичек газа. Так, например, подсчитано, что для межпланетной ракеты общим весом в 1000 т потребуется расходовать 5,25 кг газа в час. Развиваемая номинальная тяга в 91 кг достаточна, чтобы при продолжительной работе двигателя (в течение 500 суток) максимальная скорость полета могла достигать 42 км/сек, или 3650000 км/сутки. Взлет и разгон ракеты с ионным двигателем будет обеспечиваться ракетными ускорителями с ЖРД на химическом топливе. Причем возможно по окончании их работы использовать те же камеры сгорания и для истечения частиц, нагретых ядерным реактором.
Одна из задач, возникающая при создании атомно-ионных двигателей для ракет, — разработка методов непосредственного превращения атомной энергии в электрическую, необходимую для работы ионных реактивных двигателей.
Источники энергии для ракетных двигателей. Ракетный двигатель, как и всякий другой, не может работать без источника энергии.
Единственным источником энергии, используемым в настоящее время в ракетных двигателях, является химическая энергия. При работе двигателя эта энергия может выделяться в реакциях двух типов. Наиболее распространенной является реакция горения. Эта реакция используется в рабочих процессах большинства существующих тепловых двигателей.
В некоторых жидкостных ракетных двигателях используется также химическая энергия, получаемая в результате реакции разложения некоторых веществ, сопровождающаяся выделением тепла.
В своем сочинении «Космический корабль» Циолковский описывает планирующий спуск ракеты в атмосфере без затраты топлива, при возвращении ее по огибающей Землю спиральной траектории после заатмосферного полета.
Ученый отмечает особую важность создания обитаемого искусственного спутника Земли. Спуск со спутника на Землю, по замыслам Циолковского, совпадающим с современными представлениями, будет происходить практически без затраты топлива, путем планирования в атмосфере на специальном планере, пилотируемом летчиком или автопилотом. Их задача — погасить космическую скорость планера (около 8 километров в секунду) путем постепенного торможения атмосферой. Взлет с Земли на спутник должен происходить с помощью ракет. Таким образом будет поддерживаться связь со спутником, необходимая для переброски оборудования, средств питания, для смены экипажа (членов экспедиции) и другого обеспечения постоянного функционирования спутника, пока в отдаленном будущем на нем не будут созданы условия для автономного существования.
В работе «Космические ракетные поезда», изданной в 1929 году, Циолковский предлагает поезда, составленные из ракет. Эти ракеты последовательно работают и поочередно отбрасываются в полете по мере опорожнения их баков, чем достигается увеличение конечной скорости, приобретаемой последней ракетой поезда. С той же целью Циолковский предлагал пускать группу ракет с поочередно работающими двигателями; по мере расходования топлива оно восполняется в части ракет путем переливания из других ракет, причем опорожнившиеся ракеты отделяются от группы.
В 1911 -1912 годах в журнале «Вестник воздухоплавания» (Петербург) была опубликована статья, являющаяся продолжением работ Циолковского по ракетам. В этой статье, в частности, указывается на большие перспективы, открывающиеся перед ракетным летанием при использовании в качестве источника энергии для двигателя ядерных процессов и электронных или ионных двигателей.
Основная часть статьи посвящена плану завоевания и заселения мирового пространства человеком. Циолковский пишет: «Движение вокруг Земли ряда ракет со всеми приспособлениями для существования... может служить базой для дальнейшего распространения человечества». Константин Эдуардович считал, что основным источником энергии, обеспечивающим существование в неземных колониях, будет энергия солнечного излучения. Использование этой энергии должно также позволить выращивать растения в искусственной атмосфере в герметических прозрачных оранжереях.
Журнал, опубликовавший эту работу Циолковского, напечатал вместе с нею выдержку из его письма в редакцию, где говорится: «Человечество не останется вечно на Земле, но, в погоне за светом и пространством, сначала робко проникнет за пределы атмосферы, а затем завоюет себе все околосолнечное пространство».
Общие сведения о ракетном топливе. В ракетных двигателях применяются однокомпонентные и двухкомпонентные топлива.
Однокомпонентным топливом являются такие вещества или смеси, которые в процессе химических превращений способны создавать массы отброса или рабочее тело для реактивного двигателя. К ним, например, относятся: нитрометан, азотнометиловый эфир, безопасные смеси горючего с окислителем.
Двухкомпонентное топливо (или топливо раздельной подачи) имеет наибольшее применение. Такое топливо может быть самовоспламеняющимся при смешении горючего с окислителем в камере сгорания. Если оно таким свойством не обладает, то в системе двигателя необходимо иметь какое-либо зажигающее устройство.
Топливо должно обладать большой теплотворной способностью (Примеч.- Теплотворной способностью называется количество тепла, выделяющееся при сгорании 1 кг топлива. Чем больше теплотворная способность топлива, тем при прочих равных условиях больше скорость истечения и тяга двигателя.) и заданной удельной тягой (Примеч.- Каждый килограмм вытекающих в секунду газов создает тягу, численно равную 1/10 от скорости истечения. Это тяга, носящая название удельной тяги, или удельного импульса (размерность удельной тяги кг/сек/кг), является основной характеристикой любого ракетного двигателя. Чем больше удельная тяга, то есть чем большую тягу создает каждый килограмм газов, вытекающих в секунду из двигателя, тем совершеннее двигатель.).
Физико-химические свойства топлива должны обеспечивать безотказную, надежную и эффективную работу реактивного двигателя при всех заданных условиях эксплуатации.
Кроме того, топливо должно обладать наибольшим удельным весом и наибольшей газовой постоянной (Примеч.- При определенных условиях объем образовавшихся продуктов сгорания пропорционален величине газовой постоянной R. Величина объема, который имеют продукты сгорания при нормальных условиях (T=291,16°К; Р = 1 кг/см2), носит название газообразования. Она показывает, сколько литров продуктов сгорания образуется из 1 кг топлива при нормальных условиях. Чем больше эта величина, тем больше газовая постоянная (R) продуктов сгорания, тем меньше их молекулярный вес. Газообразование при горении топлива должно быть максимальным.).
При выборе топлива учитывают экономические, производственные и эксплуатационные его качества.
Проблема топлива является одной из наиболее важных задач в развитии реактивной техники. В настоящее время трудно говорить о будущем топливе для реактивных двигателей, но освоение атомной энергии в СССР сулит большие возможности в разрешении этой задачи.
Возможность применения этой энергии для реактивных двигателей предусмотрел еще основоположник теории реактивного двигателя К. Э. Циолковский. Об огромнейших мощностях реактивных двигателей, необходимых для преодоления космической ракетой земного притяжения, Циолковский писал:
«Энергии взрывчатых веществ оказывается далеко не достаточно, чтобы хотя бы им самим приобрести скорость, освобождающую их от земного тяготения... Разложение атомов и есть источник огромной энергии, в 400000 раз больше самой мощной химической энергии» (Примеч.- К. Э. Циолковский, Исследование мировых пространств реактивными приборами (переиздание работ 1903 и 1911 гг.), Калуга, 1926.).
В нашей стране имеются все условия для широчайшего изыскания и применения многих видов топлива. Мы обладаем большими запасами различного сырья для получения топлива и имеем мощную машиностроительную промышленность, способную решить сложные задачи создания реактивного двигателя.
По мнению иностранных ученых, запуск первых искусственных спутников Земли показал, что в СССР создали такое горючее для ракеты, которое позволило достичь первой космической скорости.
По сообщению журнала «Бизнес уик», американские специалисты сделали также «тревожный вывод» о наличии у русских лучшего, чем в США, горючего, способного придавать ракетам такую огромную скорость. К тому же, сообщают они, в США еще нет и двигателей, приспособленных для использования этих видов горючего.
Перейдем теперь к рассмотрению ракет-носителей ИСЗ, оборудованных реактивными двигателями и автоматическим управлением.
Данные об орбите и движении советских спутников Земли приводят американцев к заключению, что русские применили в своей ракете систему управления, которая позволила вывести ракету-носителя на заранее вычисленную орбиту.
Говоря о возможности завоевания космоса и о задачах, которые предстояло решить перед запуском спутников Земли, мы отмечали, что в первую очередь необходимо было создать ракету, которая смогла бы развить скорость не менее 8 км/сек.
К. Э. Циолковский в 1903 г. получил формулу, по которой можно определить конечную скорость ракеты для идеального случая полета в пространстве, где отсутствует сопротивление воздуха и сила тяжести:
где Vmax - конечная скорость ракеты;
Vr - скорость истечения газов из ракетного двигателя;
ln - знак натурального логарифма;
M0- начальная масса ракеты (перед взлетом);
M - масса ракеты после израсходования горючего.
Из формулы видно, что громадное влияние на скорость ракеты оказывает отношение взлетной массы к массе ракеты после израсходования всего топлива - число M0/M. Это отношение принято называть числом Циолковского.
Например, при скорости истечения газов из сопла ракеты 3000 м/сек для достижения ракетой скорости 8 км/сек это число должно быть не менее 35 ÷ 40, а для конечной скорости 11,2 км/сек - 50 ÷ 55.
Для сравнения скажем, что если ведро наполнить до краев горючим, то отношение веса ведра с горючим к весу пустого ведра будет такое, какое требуется сохранить для создания ракеты-носителя, способной донести ИСЗ на его орбиту. Практически такую ракету создать невозможно. Наибольшее число Циолковского, полученное в современных одноступенчатых ракетах, не превышает 4,5. Единственным способом получения космических, скоростей является применение составных, или, как их называют, многоступенчатых ракет.
При этом отдельные ступени последовательно вводятся в действие и по израсходовании топлива отделяются и падают на Землю. При этом, естественно, скорость ракеты все время нарастает, а масса ракеты уменьшается.
В носовой части последней ступени ракеты-носителя; ИСЗ, если только она сама не должна стать искусственным спутником, необходимо иметь пространство для размещения ИСЗ, а также приспособление для выталкивания его в нужный момент на орбиту. Таким приспособлением могут быть обычные пружины, пневматическое устройство или пиропатроны.
Для придания аэродинамической формы носовой части ракеты, заключающей в себе спутник, можно также применять сбрасываемый или раскрывающийся защитный конус.
Из вышеприведенной формулы Циолковского видно, что для достижения орбитальной скорости при меньшем весе ракеты-носителя необходимы наибольшие скорости истечения газов. К этому и стремится современная реактивная техника.
Кроме указанного выше соотношения масс M0/M, важнейшей технической характеристикой ракеты является удельный расход топлива ее двигателем. Чем меньше удельный расход топлива, тем меньше требуется топлива для достижения орбитальной скорости и, следовательно, тем меньше вес ракеты.
Удельный расход топлива современных ракет равен примерно 5 кг/м·сек, но он может быть снижен до 4,2 кг/м·сек. Удельный вес двигателей при насосной системе подачи топлива может быть доведен до 1,0 кг/м·сек. В ракете «Фау-2» удельный расход топлива составлял 4,7 кг/м·сек, а удельный вес двигателя - 1,15 кг/м·сек. В первых вариантах высотных ракет «Викинг» удельный вес топлива составлял 4,2 кг/м·сек, а удельный вес двигателя - 0,95 кг/м·сек. Дальнейшее улучшение жидкостных ракет вполне возможно. На испытательных стендах в настоящее время достигнут удельный расход топлива, равный 3,3 кг/м·сек; проектируются ракеты с удельным весом двигателя 0,25 кг/м·сек. При использовании атомного двигателя его удельный вес может быть снижен до 10-7 кг/м·сек. При проектировании ракеты-носителя ИСЗ особое внимание обращается на ее аэродинамические качества для получения большой конечной скорости ракеты. Правда, с увеличением размеров ракеты уменьшается относительное количество энергии, которое приходится тратить на преодоление сопротивления воздуха.
Однако это обстоятельство не снимает вопроса об уменьшении сопротивления воздуха в целом, и поэтому производятся тщательные исследования по совершенствованию форм корпуса ракет.
При взлете, особенно при прохождении через плотные слои атмосферы, отдельные части ракеты испытывают значительное давление воздуха.
При проектировании формы корпуса ракеты это обстоятельство учитывается таким образом, чтобы давление воздуха на каждую отдельную часть было возможно наименьшим.
Важным вопросом для ракет-носителей является нагрев корпуса вследствие трения о воздух (Примеч.- Журнал «Вопросы ракетной техники» № 1, 1955, стр. 7.), причем этот нагрев тем сильнее, чем выше скорость ракеты. Например, при скорости около 1 км/сек температура может достигнуть 400° С, а при увеличении скорости до орбитальной- 1000° С и выше. Поэтому стремятся к такой скорости на первом участке полета, чтобы в результате нагрева не нарушилась прочность конструкции ракеты. Характер движения ракеты-носителя таков, что на малых высотах, где плотность воздуха велика, скорость ракеты еще незначительна, и корпус ракеты не успевает нагреться. По мере нарастания скорости до орбитальной ракета достигает больших высот с сильно разреженной атмосферой, где нагрев корпуса от трения о воздух уже не может быть большим.
Мы указывали, что в будущем космические корабли, предназначенные для полета на Луну или планеты солнечной системы, могут отправляться со специальных космических станций, практически находящихся за пределами атмосферы. Если такие космические корабли будут собираться на этих станциях, то их форма, в смысле аэродинамических качеств, значения иметь не будет, так как они в полете не будут испытывать никакого сопротивления.
Мы много раз подчеркивали, какое значение имеет вес ракеты. Поэтому при разработке конструкции ракеты-носителя ИСЗ конструкторы проектируют ее таким образом, чтобы каждая отдельная деталь, каждый винтик имел минимальный вес. Особое значение приобретает при этом создание новых легких и прочных материалов.
Раньше упоминалось, что забросить спутник на орбиту могут только многоступенчатые ракеты. (Вероятнее всего трех- или четырехступенчатые). Такая конструкция может быть осуществлена по-разному: во-первых, это могут быть три последовательно соединенные ракеты (рис. 15), причем первая ступень будет самой большой как по размерам, так и по весу, а последняя - самой малой; во-вторых, это может быть несколько ракет, последовательно соединенных между собою, но хвостовая часть каждой из них будет заходить в носовую часть следующей ступени ракеты (см. рис. 16); в-третьих, ступени могут быть заключены одна в другой, как бы надеты друг на друга (см. рис. 17), наконец, в-четвертых, многоступенчатая ракета может представлять собой обойму из отдельных ракет, расположенных рядом друг с другом.
Независимо от конструкции ступеней ракеты для экономии материалов и средств сейчас изучаются способы спасения ступеней ракеты после того, как они выполнят свою роль, то есть отделятся от основной части ракеты и полетят к Земле. Эта задача в настоящее время еще полностью не решена, хотя были проведены опыты, в которых испытывались различные системы парашютов и других приспособлений.
Попутно заметим, что самым идеальным решением вопроса было бы использование материала отработавшей ступени в качестве топлива для последующих ступеней. Принципиально такая возможность была показана еще в 1928 г. советским ученым Ф. А. Цандером. Но практическое решение этой задачи пока связано с очень большими трудностями, и такое решение будет делом далекого будущего.
 Рис. 15. Многоступенчатая ракета-носитель ИСЗ с последовательным расположением ступеней: 1- полезная нагрузка; 2 - управление; 3 - третья ступень; 4 - вторая ступень; 5 - первая ступень |  Рис. 16. Ракета-носитель ИСЗ с заходящими друг в друга ступенями |
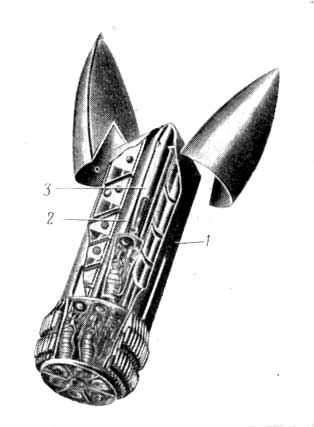 Рис. 17. Ракета-носитель ИСЗ с встроенными друг в друга ступенями: 1 - третья ступень ракеты; 2 - вторая ступень ракеты; 3 - первая ступень ракеты |
Уже появилось много проектов термических атомных ракет.
Видные специалисты ракетной техники при разработке больших ракет-носителей ИСЗ продолжают, как и раньше, ориентироваться на более отработанные типы жидкостных ракет. Конструктор ракеты «Фау-2» доктор Вернер фон Браун, например, считает, что жидкостные ракеты будут оказывать решающее влияние на развитие ракет по крайней мере в ближайшие двадцать лет.
Независимо от конструкции каждая ракета обладает определенными основными характеристиками, причем основные взаимоотношения между ними определяют в конечном счете ее главнейшие качества. К рассмотрению этих характеристик мы сейчас и перейдем.
1. Полезный груз. Для одноступенчатых ракет под этим термином понимается: для ракеты-носителя - вес искусственного спутника, выносимого на орбиту; для боевой ракеты - вес боевого заряда; для исследовательской ракеты - вес инструментов и приборов. В случае многоступенчатой ракеты полезный груз (как и прочие характеристики) должен рассматриваться для каждой ступени отдельно. Например, полезным грузом первой ступени будет общий вес второй ступени, полезным грузом второй ступени - общий вес третьей ступени и т. д.
2. Аппаратура управления. Эта часть оборудования ракеты включает в себя все приборы и инструменты, с помощью которых осуществляется управление ракетой во время ее полета. В случае многоступенчатой ракеты первая ступень ее обычно служит для разгона и поэтому, как правило, таких приборов не имеет. Они имеются на второй и третьей, а иногда только на третьей ступени ракеты.
3. Конструкция включает корпус самой ракеты и ее ступеней (для многоступенчатых ракет), подкрепления, крепежные детали и т. д.
4. Насосы и двигатели. Сюда относятся двигатели, система подачи и распределения топлива, система охлаждения камеры сгорания и сопла.
5. Топливо. Сюда относятся: горючее вещество, окислитель, смазочные материалы и горючее для системы машин, подающих топливо в камеру сгорания.
6. Общий вес ракеты, который является суммой весов перечисленных выше частей ракеты,
7. Расход топлива, измеряемый обычно в килограммах в секунду. В случае многоступенчатых ракет расход топлива, как увидим ниже, для первой ступени может более чем в 100 раз превышать расход топлива для последней ступени.
8. Тяга, изменяемая обычно в килограммах или тоннах. Под тягой понимается усилие, развиваемое двигателем, заставляющее с определенным ускорением двигаться ракету. Мы уже отмечали, что тяга зависит от скорости частиц газа, вырывающихся из сопла двигателя, а эта скорость зависит в свою очередь от химических свойств топлива и температуры горения. Эта характеристика является одной из важнейших для ракеты.
9. Удельная тяга - тяга, создаваемая при сгорании единицы веса топлива в одну секунду.
10. Время горения в секундах. Эта характеристика по существу определяет время работы двигателя ракеты или ее ступени. Оно должно быть достаточным для того, чтобы ракета успела развить необходимую скорость.
11. Ускорение. Оно обычно измеряется в единицах g, где g - ускорение силы тяжести у поверхности Земли, равное 9,81 м/сек2. Ускорение, как показывает само слово, характеризует нарастание скорости в результате работы двигателей, и его величина играет большую роль при расчетах полета ракеты.
12. Длина ракеты. Этим размером определяют высоту всей ракеты или высоту отдельной ступени. От отношения длины ракеты к ее среднему диаметру зависит устойчивость ракеты на траектории полета. Чем больше будет это отношение, тем менее она будет устойчива.
13. Диаметр - средний диаметр всей ракеты или диаметр каждой ее ступени.
14. Число двигателей. В случае многоступенчатой ракеты, как мы уже знаем, каждая ступень будет иметь свои двигатели. Число двигателей зависит от размера и веса ракеты, а также от ее назначения. Обычно первая ступень имеет несколько двигателей, а последняя чаще всего один. Дело в том, что двигателям первой ступени приходится преодолевать самый трудный участок пути, когда ракета имеет наибольший вес при значительном сопротивлении плотных слоев атмосферы.
15. Высота подъема или дальность полета ракеты. Для запуска ИСЗ на орбиту особое значение имеет высота подъема, которая зависит от приведенных выше характеристик и от соотношений между ними. Для боевых ракет, летящих от точки запуска до места цели, более характерна дальность полета, зависящая от тех же факторов.
Для того чтобы читатель мог судить о порядке численных значений указанных выше характеристик, приведем таблицу для проекта ракеты-спутника с последовательным расположением ступеней.
Таблица 3
| Наименование характеристики | Первая ступень | Вторая ступень | Третья ступень |
| Полезный груз, кг | 15600 | 1680 | 100 |
| Аппаратура управления, кг | - | - | 100 |
| Конструкция, кг | 5420 | 1900 | 240 |
| Насосы и двигатели, кг | 9350 | 1620 | 120 |
| Топливо, кг | 60530 | 10400 | 1120 |
| Общий вес, кг | 90900 | 15600 | 1680 |
| Расход топлива, кг/сек | 587,7 | 101,0 | 5,4 |
| Тяга, кг | 181800 | 31200 | 325 |
| Удельная тяга, кг/сек/кг | 325 | 325 | 325 |
| Время горения, сек | 103 | 103 | 206 |
| Ускорение, g(9,81 м/сек2) | 6 | 6 | 3 |
| Длина, м,, | 24 | 13,25 | 6 |
| Диаметр, м | 3,5 | 1,9 | 1,0 |
| Число двигателей | 5 | 1 | 1 |
| Высота подъема, км | - | - | 800 |
Как видно из таблицы, отношение M0/M для первой ступени будет равно примерно трем. Напомним, что M0 - общая масса ракеты перед полетом, а М - ее масса в конце активного участка первой ступени.
Для второй и третьей ступени это соотношение также будет равно трем. При вычислении соотношения M0/M необходимо общий вес для каждой ступени делить на сумму весов, определяемых пунктами 1, 2, 3, 4 в табл. 3.
Из этой же таблицы видно, что расход топлива и тяга для первой ступени более чем в 100 раз превосходят их значения для третьей ступени.
Запасы топлива первой ступени почти в 60 раз превышают запасы, которые несет с собою третья ступень. Примерно во столько же раз больше и общий вес первой ступени по сравнению с третьей.
Все эти цифры показывают, какую большую работу приходится затрачивать первой ступени, насколько в более тяжелых условиях проходит первый этап полета. Кроме того, из таблицы видно, что использование трехступенчатой ракеты, обладающей приведенными выше характеристиками, позволяет достигнуть орбиты, расположенной па высоте 800 км над Землей. Причем отношение масс для каждой ступени равно всего трем. При таком соотношении масс одноступенчатая ракета не смогла бы выйти даже за пределы плотных слоев атмосферы.
Усовершенствованная американцами одноступенчатая ракета «Фау-2» при несколько более благоприятном соотношении масс (около 3,5) 17 декабря 1946 г. достигла высоты только 182 км.
В качестве топлива для ракеты, характеристики которой приведены в таблице, предполагалось применить жидкий кислород и гидрозин.
В США и других капиталистических странах усиленно ведутся работы по созданию ракет-носителей ИСЗ.
Для преодоления трудностей, связанных с прохождением плотных слоев атмосферы, имеются проекты применения в качестве двигателей первой ступени ракеты прямоточных реактивных двигателей, что должно снизить вес первой ступени. Некоторые ученые предлагают преодолеть плотные слои атмосферы с помощью воздушных двигателей или реактивных самолетов.
Например, сотрудником фирмы «Белл» Стелингом и профессором университета штата Айова Миссертом предполагается создать воздушный шар диаметром около 60 м и объемом около 8500 куб. м, который будет запускаться на высоту 24 км и сможет поднять трехступенчатую ракету весом около 6 т. Предполагается, что по достижении шаром указанной высоты ракета может быть с него запущена на орбиту, отстоящую на расстоянии 320 км от Земли.
Первая ступень этой ракеты будет состоять из четырех пороховых двигателей, в качестве второй ступени будет использована жидкостная ракета весом 590 кг; третья ступень весом 90 кг, несущая полезный груз в 14 кг, заключающийся в приборах, и будет являться собственно спутником.
Запуск ее предполагают осуществить под углом 45° к горизонту. Управляемой будет только вторая ступень ракеты. Третья ступень ракеты будет снабжена приборами наблюдения, питаемыми от солнечной батареи, которые должны передавать на Землю полученные ими сведения. Над осуществлением этого проекта уже работает фирма «Дженерал Миллс» (США).
Американская фирма «Америкен Рокет» работает над созданием ИСЗ под названием «Майти Майт». О нем известно, что он будет запущен с помощью пороховых ракет, весящих в общем 640 кг, с реактивного самолета, летящего на высоте 20-30 км со скоростью, примерно в два раза превышающей скорость звука. Так как ракета третьей ступени диаметром 12 см и длиной 60 см будет неуправляемой, то угол старта и начальная скорость будут зависеть от направления и скорости самолета, с которого будет производиться запуск. От условий старта будет зависеть и высота орбиты. Вес приборов, которые будут располагаться на нем, составит 2,25 кг, и наблюдение за ним будет осуществляться с Земли с помощью радиолокационной установки.
Таковы проекты ракет-носителей ИСЗ, разрабатываемые в США.
США не имеют межконтинентальных баллистических ракет. Если бы США имели такую ракету, то они бы еще в 1957 г. запустили искусственный спутник Земли, как это сделали советские ученые и инженеры. Ведь в СССР запустили спутник на основе межконтинентальной баллистической ракеты. США собирались запустить спутник «Авангард» весом в 11 килограммов. Разве это баллистическая ракета? В 1958 г. в США запущен ИСЗ весом около 14 килограммов на ракете средней дальности действия «Юпитер-С». Мы же запустили первый спутник весом в 83,6 килограмма, второй с полезным весом в 508 килограммов, а если потребуется, можем удвоить и более чем удвоить вес искусственного спутника.
Для нас межконтинентальная ракета, говорил Н. С. Хрущев, это вопрос решенный. Если потребуется, мы можем запустить искусственные спутники еще большего веса на еще большую высоту, сколько нужно, столько и запустим, потому что для этого нам ничего нового в технике не требуется. Надо только в межконтинентальную баллистическую ракету, имеющую огромную мощность, поставить необходимую аппаратуру.
Советский Союз опередил США не только в области межконтинентальных ракет, но и в производстве ракет вообще. Теперь в США некоторые деятели говорят, что нам будто бы помогли немецкие специалисты, взятые в плен во время второй мировой войны. Это, конечно, вздор. Посудите сами. Американские войска заняли базы немецких снарядов «Фау», вывезли главного конструктора, специалистов и все оборудование. Между тем в США до сих пор не создана баллистическая межконтинентальная ракета.
Создание ракетной техники в СССР - это результат развития советской науки и техники, нашей промышленности. Эти достижения являются гордостью нашего советского народа, нашего социалистического государства.
Н. С. Хрущев говорил, что наши конструкторы создали такие ракеты, которые в случае нападения на нашу страну могут поразить любую базу в Европе, Азии и Африке. Даже при первом запуске наша ракета точно легла в заданном квадрате. Если мы договоримся с США и другими государствами о разоружении, то, может быть, мы тогда согласимся вместе вывести ракеты на какой-то полигон, поставим задачу на поражение цели и посоревнуемся в стрельбе ракетами, прежде чем сдать их в музей или уничтожить.
Теперь рассмотрим примерное устройство ракеты-носителя ИСЗ. Приведем описание одного из проектов ракеты «Авангард», предназначавшейся для запуска искусственного спутника Земли в США.
В США усиленно обсуждаются проблемы, связанные с запуском искусственного спутника Земли. Выступая на одном совещании, технический руководитель программы запуска спутника (проект «Авангард») Мильтон Розен перечислил основные проблемы, подлежащие разрешению в процессе разработки этой программы, и привел основные технические характеристики ракеты для запуска спутника. Розен указал, что в США еще в 1949 г. двухступенчатая ракета «Бампер» поднялась на высоту 400 км при максимальной скорости 2750 м/сек с такой же полезной нагрузкой, какая запроектирована, для ракеты спутника «Авангард». Последняя же должна подняться на высоту 480 км при скорости 7620 м/сек.
Из американской печати известно, что разработка этой ракеты-носителя ИСЗ была поручена ряду ведущих фирм. На рис. 18 показана предполагаемая схема такой ракеты.
 Рис. 18. Ракета-носитель ИСЗ: 1 - спутник; 2 - носовой конус, предохраняющий спутник от нагрева при подъеме; 3 - выбрасывающий механизм (взрывной или пружинный); 4 -третья ступень ракеты; 5 - источник электроэнергии третьей ступени; 6 - бак с гелием для подачи топлива в двигатель; 7 - бак для горючего второй ступени (диметилгидразин); 8 - бак для окислителя (азотная кислота); 9 - двигатель второй ступени; 10 - источник электроэнергии второй ступени; 11 - бак для горючего первой ступени (75% этилового спирта, 25% бензина с добавкой силиконового масла); 12 - бак для перекиси водорода; 13 - бак для окислителя (жидкий кислород); 14 -турбонасосы, работающие на перекиси водорода; 15 - двигатель первой ступени |
Характерной особенностью ракеты является отсутствие у всех трех ступеней стабилизаторов и рулей; управление по тангажу (Примеч.- Угол тангажа - угол, образуемый продольной осью ракеты и плоскостью горизонта.) и рысканью (Примеч.- Углом рысканья называют отклонения продольной оси ракеты от заданного курса в плоскости горизонта. Для управляемых снарядов углом рысканья будет отклонение продольной оси снаряда от плоскости стрельбы.) на первой и второй ступенях будет осуществляться путем поворота жидкостных реактивных двигателей, смонтированных на карданных шарнирах. Отклонение на угол до 5° будет производиться с помощью злектрогидравлического привода, получающего команды от гироскопов гироскопического блока, с помощью которого первая и вторая ступени ракеты будут управляться в полете. Гироблок располагается на второй ступени. Управление по крену будет осуществляться с помощью небольших, тангенциально расположенных жидкостных ракетных двигателей. Неуправляемая третья ступень будет ориентирована по высоте, положению и направлению второй ступенью, которая придает ей также стабилизирующее вращение, прежде чем начнет работать двигатель третьей ступени.
Общая длина ракеты на старте составит 22 м, максимальный диаметр 1,15 м.
В качестве первой ступени ракеты для запуска спутника предполагалось использовать несколько измененную исследовательскую ракету «Викинг» с новым форсированным двигателем. Этот двигатель должен обеспечить разгон ракеты до 15% орбитальной скорости. Тяга этого двигателя составит 12,2 т, а время работы 125-140 сек. Двигатель будет работать на смеси спирта с бензином и жидком кислороде, подаваемых из баковых отсеков с помощью турбонасосов. По мере расходования топлива баки будут заполняться гелием.
ЖРД второй ступени ракеты будет работать на дымящей азотной кислоте и гидрозине, подаваемых в камеру сгорания под давлением сжатого гелия. Большое число миниатюрных реактивных двигателей стабилизации обеспечит управление ракетой после окончания работы двигателя второй ступени, когда вторая и третья ступени будут набирать орбитальную высоту. Ожидается, что вторая ступень наберет 32% орбитальной скорости. Носовой конус второй ступени будет перекрывать третью ступень и самый спутник, предохраняя их от аэродинамического нагревания; конус будет сброшен во время начальной стадии работы второй ступени, когда плотность воздуха уменьшится и соответственно уменьшится нагревание ракеты.
Как мы уже говорили, третья ступень ракеты неуправляемая; для обеспечения устойчивости в полете она будет вращаться вокруг продольной оси.
После выхода на орбиту третья ступень и спутник могут быть разделены и продолжать свой путь по орбите как два самостоятельных спутника. Это целесообразно сделать во избежание проникновения тепла от двигателя к чувствительным приборам спутника, а также для удобства размещения телеметрических антенн.
Как же запускается на орбиту ракета-носитель ИСЗ? Казалось бы, выгоднее всего запустить ракету вертикально вверх, так как в этом случае она полетела бы к орбите по кратчайшему пути. Однако такой метод осуществления запуска оказывается самым невыгодным с точки зрения потребного расхода топлива.
Рассмотрим этот вопрос подробнее.
Ракета, запущенная вертикально, набирает скорость не мгновенно, а в течение некоторого времени. Сила же притяжения Земли, действующая постоянно в течение этого же времени, вызывает обратный снос ракеты к центру Земли (так называемый гравитационный снос).
Этот снос весьма значителен. Если бы не работали двигатели ракеты, то за первые 100 секунд эта направленная к Земле скорость составила бы 1 км/сек, а за 800 секунд полета ракеты она достигла бы 8 км/сек, т. е. как раз величины первой космической скорости. Из сказанного ясно, что если ракета все время будет двигаться по вертикали, то сила тяжести вскоре поглотит силу тяги ее двигателей, и ракета, израсходовав запас горючего, остановится в определенной точке, а затем станет падать на Землю, что и получается с современными геофизическими ракетами. Поэтому чрезвычайно трудно при вертикальном запуске получить на большой высоте большую скорость ракеты.
Для того чтобы ИСЗ не падал обратно на Землю, ему необходимо сообщить значительную горизонтальную скорость полета.
 Рис. 19. Примерная траектория выхода ракеты-носителя ИСЗ на орбиту |
Необходимо так организовать взлет ракеты-носителя, чтобы в минимально возможное время доставить спутник на орбиту и чтобы он имел необходимую горизонтальную скорость полета.
Перед запуском ракеты ученые в зависимости от избранной орбиты производят целую серию сложнейших расчетов, предварительно вычисляя наиболее выгодную (оптимальную) траекторию выхода ракеты на орбиту (рис. 19).
Первый участок полета ракеты избирается вертикальным для того, чтобы ракета возможно скорее преодолела плотные слои атмосферы, однако этот участок обычно не велик и составляет около 20 км.
Как только ракета выйдет в более разреженные слои атмосферы, она с помощью автопилота будет постепенно наклоняться, с тем чтобы, достигнув орбиты, выйти на нее в горизонтальном положении с большой скоростью полета. В этих расчетах учитываются также потери скорости ракеты в результате сопротивления воздуха и гравитационного сноса и точно определяется режим работы двигателей ракеты, чтобы они могли обеспечить получение на орбите круговой скорости, при которой центробежная сила уравновесила бы силу притяжения Земли.
Мы уже говорили, что минимальное значение характеристической скорости - 7,9 км/сек (так называемую первую космическую скорость) имеет ракета, посылающая ИСЗ на орбиту, проходящую непосредственно у поверхности Земли. Значение характеристической скорости ракеты зависит от расстояния орбиты спутника до Земли. Например, для высоты 1730 км она равна 8716 м/сек, а для высоты 35800 км - 10709 м/сек. Наконец при скорости 11190 м/сек (вторая космическая скорость) ракета может улететь в космос.
Кроме того, задача инженеров, рассчитывающих программу взлета ракеты-носителя ИСЗ на орбиту, состоит в том, чтобы траектория взлета была такой, при которой потери скорости от сопротивления воздуха и притяжения Земли составляли бы не более нескольких процентов от величины характеристической скорости. Таким образом, для того чтобы получить действительную скорость ракеты для запуска спутника на данную орбиту, расчетное значение характеристической скорости необходимо увеличить. Для взятых в качестве примера орбит (1730 км и 35800 км) орбитальные скорости соответственно будут несколько увеличены.
Оказывается, что далеко не безразлично, в какую сторону запустить ракету-носитель ИСЗ.
Если ракету запустить в сторону вращения Земли (рис. 20), то можно получить дополнительное, «бесплатное» приращение скорости ракеты за счет скорости вращения Земли. Величина этого приращения зависит от широты места запуска. На экваторе, например, оно имеет максимальное значение и равно 403 м/сек. Это больше скорости некоторых современных истребителей. По мере приближения к полюсам приращение скорости убывает. Может возникнуть вопрос: а как же наши самолеты? Ведь они летают в самых разнообразных направлениях, и мы обычно не интересуемся тем, совпадает ли их полет с направлением вращения Земли или нет.
 Рис. 20. Возможное направление рационального полета ракеты для создания искусственного спутника Земли |
Действительно, современным самолетам безразлично, в какую сторону лететь. Если мы говорим, что самолет летит со скоростью 1000 км/час, то полагаем, что он эту скорость имеет независимо от направления полета. Практически мы совершенно правы.
Но именно только практически. Теоретически же самолет, летящий по направлению вращения Земли, будет всегда несколько легче, а летящий в обратном направлении - немного тяжелее. Однако при существующих скоростях самолета эти изменения его веса настолько ничтожны, что их можно не учитывать.
Представим себе самолет, который будет обладать скоростью, скажем, в 3-4 раза большей скорости звука.
Появление таких самолетов дело совсем недалекого будущего. Как показывают расчеты, в таком случае влияние центробежной силы уже обязательно придется учитывать конструкторам. Вес самолета может уменьшиться или увеличиться приблизительно на 2% в зависимости от направления полета на восток или на запад, а это влечет за собой (в случае выигрыша в весе) и увеличение дальности полета и возможность создания увеличенных запасов топлива. Можно, например, сказать по грубым прикидкам, что самолет, делающий перелет вокруг земного шара в направлении на восток, может пролететь приблизительно на 800 км дальше, если он будет обладать указанной выше скоростью. С дальнейшим ростом скоростей этот фактор будет приобретать все большее и большее значение.
Мы уже упоминали, что орбиты спутников могут быть не только круговыми, но и эллиптическими. Эллиптические орбиты мы получим в том случае, если скорость, приданная ракете, будет несколько выше окружной или скорость в момент окончания работы двигателя не будет направлена по касательной к круговой орбите. Тогда, вместо того чтобы остаться на круговой орбите, ракета устремится дальше, и траектория ее полета будет уже не окружностью, а эллипсом.
Ближайшая к Земле точка на эллиптической орбите называется перигеем, а наиболее от нее удаленная - апогеем, причем перигей может быть гораздо ближе к Земле, а апогей гораздо дальше от Земли, чем первоначальная круговая орбита. Один из вариантов запуска ракет на орбиту, отстоящую на 1730 км от Земли, предусматривает, что первоначально ракета полетит по эллиптической орбите, причем перигей в этом случае составляет около 102 км, а апогей - 1730 км. Двигатели, разгоняющие ракету до характеристической для этой орбиты скорости, включаются в момент достижения ракетой апогея. В СССР в 1957 г, успешно осуществлен запуск первых ИСЗ. В США в это время публиковались в печати многочисленные проекты запуска ИСЗ.
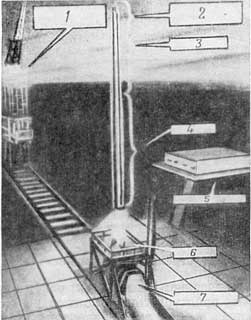 Рис. 21. Старт ракеты-носителя, несущей спутника на орбиту: 1 - кран, устанавливающий ракету на стартовую площадку; 2 - третья ступень ракеты со спутником (внутри); 3 - вторая ступень ракеты; 4 - первая ступень ракеты; 5 - командный пункт; 6 - стартовая установка; 7 - отвод выхлопных газов |
 Рис. 22. Примерная траектория выхода ракеты, поднимающей спутник на орбиту: 1 - место старта; 2 - вертикальный участок полета; 3-участок выхода на оптимальную траекторию; 4 - прекращение работы двигателя и отделение первой ступени; 5 - прекращение работы двигателя второй ступени; 6 - контролируемая оптимальная траектория; 7 - полет по инерции; 8 - отделение второй ступени и начало вращения третьей ступени; 9 - начало работы третьей ступени; 10- стабилизирующее вращение; 11 - конец работы и отделение третьей ступени; 12 - орбита спутника; 13 - скорость 7620 м/сек, высота 320-640 км, расстояние от места старта 2400 км, время после старта 10 минут |
Приведем описание одного из проектов запуска американской рахегы-носителя ИСЗ «Авангард», с которой мы уже знакомы. Запуск ракеты-носителя ИСЗ предполагалось осуществить в 1958 г. на базе ВВС США в Патрике (штат Флорида) в направлении от 28 до 35° к юго-востоку (азимут 118-125°). Запуск именно в этом направлении может обеспечить, по мнению ученых США, дополнительный прирост скорости за счет вращения Земли, а также позволит удобно наблюдать спутник.
Ракета должна стартовать вертикально, как показано на рис. 21, а затем начнет постепенно наклоняться. В момент окончания работы двигателя первой ступени на высоте 58 км от земли угол наклона ракеты составит 45° к вертикали. Затем первая ступень ракеты отделяется, начинают работать двигатели второй ступени. Первая ступень упадет на землю в 370 км от места старта. Вторая ступень будет подниматься по траектории с возрастающим углом наклона; двигатель кончит работать на высоте 225 км. После этого ракета по инерции поднимется до максимальной высоты 480 км и окажется в точке, отстоящей на 1125 км от места старта. В этой точке начнет работать двигатель третьей ступени (рис. 22).
Еще раз подчеркнем, что запуск ракет-носителей на определенную орбиту весьма сложное дело. Оно требует точнейшей работы ряда приборов, описание некоторых из них мы приведем ниже. Самая незначительная ошибка какого-либо из этих приборов приведет к неудаче запуска в целом.
Точность стрельбы орбитальных ракет зависит отряда причин. Погрешность в угле возвышения вектора скорости в конце активного участка в 1° вызывает изменение высоты перигея (и апогея) на 120 км. Погрешность в скорости 30 м/сек при горизонтальном направлении вызовет изменение высоты апогея на 110 км. Если крайние высоты эллиптической орбиты искусственного спутника, например, колеблются в пределах от 370 км (перигей) до 1480 км (апогей), а конец активного участка траектории находится на высоте 560 км, то можно допустить абсолютную погрешность в угле возвышения до 2°30' и относительную погрешность в горизонтальной скорости до 1%. Для спутника, летящего на высоте нескольких сот километров, изменение высоты полета на 300 м повлечет за собою изменение периода обращения на 0,4 сек. Изменение же начальной скорости на 30 м/сек вызовет изменение периода обращения на 70 сек. Ошибка в угле возвышения в конце активного участка траектории искусственного спутника не влияет на период его обращения. При движении спутника по эллиптической траектории его скорость меняется, причем в случае, если перигей расположен на высоте 370 км, а апогей на высоте 1480 км, разница в скорости достигает 1,22 км/сек. Необходимая «точность стрельбы» ракет-носителей ИСЗ обеспечивается соответствующими приборами управления. Что же представляют собой эти приборы и как происходит управление полетом ракет-носителей?
Траектория и режим полета ракеты, вычисленные предварительно, должны точно выдерживаться.
Вполне понятно, что для осуществления этого ракета должна иметь точнейшие приборы, работа которых будет связана с действием наземных установок.
Принцип действия большинства из них очень сложен, поэтому мы опишем в общих чертах задачи, которые будут выполняться основными приборами.
Для того чтобы ракета-носитель вышла на орбиту по рассчитанной траектории и были строго выдержаны режимы и время работы отдельных ступеней ракеты, она должна управляться на всем пути полета.
Если в пределах плотной атмосферы для изменения направления полета ракеты могут служить рули, похожие на рули реактивных самолетов, то в зоне сильно разреженной атмосферы они будут менее эффективны.
Как же будет осуществляться управление в этом случае? К. Э. Циолковским для этой цели были предложены так называемые газовые рули. Их принцип действия заключается в том, что рули, изготовляемые из тугоплавкого материала, например из графита, и располагаемые в струе вырывающихся из сопла раскаленных газов, отклоняют эту струю в ту или иную сторону и тем самым меняют направление полета ракет. Поворот газовых рулей осуществляется с помощью программного механизма или по радиосигналам с Земли.
Существует и другой способ, о котором упоминалось при описании ракеты-носителя спутника. Если ракета будет иметь не только центральные, но и боковые двигатели, то, попеременно включая или выключая последние, можно осуществить управление ракетой после выхода ее в космос.
Наконец, конструкция ракет может быть такой, что можно изменять направление струи истекающих газов, поворачивая продольную ось самого двигателя относительно продольной оси ракеты.
Такой способ управления применяется в ряде современных дальнобойных ракет.
При запуске ракеты первостепенное значение имеет стабилизация ее в полете на траектории, т. е. обеспечение того, чтобы ракета при движении не отклонилась, а точно следовала бы по заданной ей траектории полета.
Наиболее важными узлами системы стабилизации ракеты во время ее полета является автопилот с гироскопическими чувствительными элементами. Гироскоп - особого рода волчок, вращающийся с большой угловой скоростью. Такое тело стремится сохранить неизменным направление своей оси вращения относительно мирового пространства, т. е. ось свободного гироскопа стремится сохранить то положение, которое ей было задано при запуске гироскопа. Гироскопические устройства, с помощью которых осуществляется стабилизация ракеты в полете, используют именно это свойство гироскопов. На основе таких гироскопических устройств конструкторы авиационного приборостроения создали прибор, называемый автопилотом.
 Рис. 23. Структурная схема автопилота 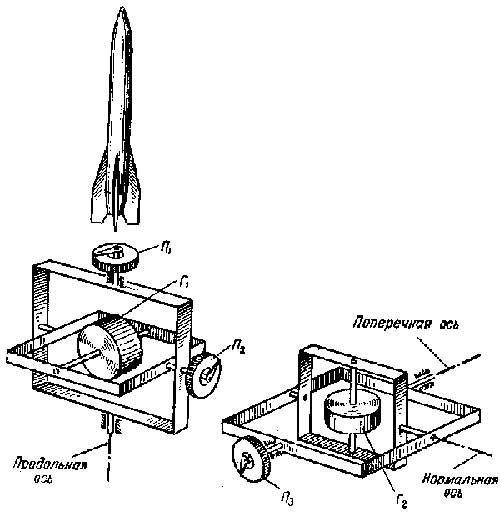 Рис. 24. Схема расположения гироскопов автопилота: П1, П2, П3 - потенциометры; Г1, Г2 - гироскопы |
Принцип работы автопилота можно уяснить из рис. 23, где показана структурная схема автопилота, управляющего угловыми положениями ракеты в полете по заданной программе. Гироскопический чувствительный элемент воспринимает угловые отклонения ракеты и дает на выходе сигнал, пропорциональный этим отклонениям. Задатчик программы автоматически вырабатывает сигналы, пропорциональные заданным угловым отклонениям ракеты. Если ракета не выполняет заданной программы полета, то разность сигналов чувствительного элемента и задатчика программы подается на усилитель, а затем на рулевые машинки, управляющие рулями ракеты. При этом рули поворачиваются в такую сторону, чтобы устранить рассогласование между заданным и фактическим угловым положением ракеты.
На некоторых ракетах, например «Фау-2» и др., автопилот имел лишь два гироскопа с тремя степенями свободы (рис. 24). Ось первого гироскопа (Г1) параллельна поперечной оси ракеты, так что вращение ракеты вокруг этой оси не может быть обнаружено с помощью этого гироскопа. Он используется для управления движением ракеты относительно продольной и вертикальной осей ракеты. Управление осуществляется с помощью двух проволочных потенциометров: один (П2) служит для регистрации отклонений ракеты от курса, другой (П1) - вокруг продольной оси. Потенциометры расположены на кардановом подвесе гироскопа перпендикулярно друг другу. Сигналы, снимаемые с потенциометров, усиливаются электронными лампами и передаются на соответствующие рулевые машинки и рули. Другой гироскоп (Г2) служит для управления движением вокруг поперечной оси. Поворот ракеты вокруг поперечной оси воспринимается проволочным потенциометром (П3), сигнал с которого после усиления передается на соответствующие рули. С помощью специального вращения оси гироскопа Г2 в плоскости, параллельной нормальной и продольной осям ракеты, осуществляется поворот ракеты вокруг поперечной оси при ее движении по траектории. Это вращение, происходящее по определенной программе, должно находиться в соответствии с расчетной траекторией движения ракеты. Характер изменения угла наклона продольной оси ракеты к горизонту показан на рис. 25.
Как видно из рисунка 25, участок траектории полета ракеты-носителя до выхода ее на орбиту, т. е. до принятия ее продольной осью горизонтального положения, разбивается на ряд этапов (на рисунке: H1, H2, H3, H4 и т. д.). Таких этапов в зависимости от высоты орбиты может быть много. Каждому из них соответствует определенный угол наклона продольной оси ракеты к горизонту (a1, a2, a3 и т. д.). На первом этапе обычно этот угол равен 90°, т. е. ракета летит вертикально.
В дальнейшем по этапам этот угол постепенно изменяется согласно изменению его на рассчитанной заранее траектории полета. По расчетной траектории устанавливается на приборах управления ракеты программа ее полета. Эти программные приборы регулируют подачу топлива и положение руля.
Естественно, что на ракете должны существовать приборы, точно измеряющие и регистрирующие ее скорость на различных этапах полета и тем самым контролирующие выполнение заданной программы.
 Рис. 25. Траектория выхода ракеты-носителя на орбиту с помощью программных приборов управления: H1, H2, H3, H4 - высота ракеты над землей; a1, a2, a3 и a4 - углы наклона продольной оси ракеты по отношению к горизонту; V1, V2, V3 и V4 - направление вектора скорости полета ракеты; Vкp - вектор круговой скорости ракеты; Hорб - высота орбиты ИСЗ |
На первых ракетах измерение скорости полета ракеты осуществлялось радиотехническим методом. Ракеты были оборудованы радиопередатчиком и радиоприемником. Радиопередатчик генерировал колебания, принимавшиеся станцией, находящейся на месте старта. Наблюдавшийся при этом эффект Допплера использовался для определения скорости полета ракеты. Этот эффект мы часто наблюдаем в области звуков, когда, например, слышим гудок приближающегося или удаляющегося паровоза. Поскольку частота звука приближающегося паровоза увеличивается, а удаляющегося уменьшается, то эффект Допплера воспринимается нами как заметное изменение тона звука, вызванное движением,
По изменению частоты излучаемого ракетой радиосигнала и судят о величине ее скорости. В нужный момент, когда ракета достигла необходимой скорости, с Земли посылается соответствующий сигнал. Радиоприемник, находящийся на борту ракеты, принимает его, и подача горючего прекращается. Этот метод имеет тот недостаток, что радиоприемник может реагировать на ложные сигналы и помехи. Несмотря на то, что были найдены средства борьбы с помехами, радиометод измерения скорости полета был заменен автономным методом измерения скорости, основанным на измерении ускорений с помощью акселерометра и интегрировании этих ускорений. Принципы действия и конструкции акселерометров могут быть самые различные.
Нашел применение акселерометр, представляющий собой гироскопический маятник, установленный в карданном кольце G (рис. 26). Ось CD является осью маятника. Кольцо подвеса G может вращаться вокруг оси EF, параллельной продольной оси ракеты.
Ось АВ вращения гироскопа автоматически удерживается перпендикулярно оси EF с помощью корректирующего выключателя и двигателя М.
При отклонении оси АВ гироскопа от направления, перпендикулярного оси EF, корректирующий выключатель включает через реле питание электродвигателя М. Вращающий момент этого двигателя через редуктор передается на ось EF карданного кольца G, заставляя перемещаться гироскоп в сторону восстановления перпендикулярности оси АВ и EF. Таким образом, электродвигатель М удерживает гиромаятник в нормальном рабочем положении, когда чувствительность гиромаятника наибольшая, а также полностью компенсирует влияние моментов трения на оси EF.
Если ракета летит с ускорением, равным а, то на маятник будет действовать инерционная, сила Р, равная произведению массы m маятника на ускорение а. Момент Mвр от этой силы, направленный вдоль оси CD, вызывает угловую скорость прецессии wг гироскопа вокруг оси EF. Угол поворота оси гироскопа вокруг оси EF равен интегралу по времени от угловой скорости прецессии, т. е. пропорционален интегралу по времени от ускорения, или, что одно и то же, скорости полета ракеты. Влияние ускорения силы тяжести заранее учитывается и компенсируется,
 Рис. 26. Схема интегрирующего акселерометра: AB - ось гироскопа; CD - ось маятника; EF -ось карданного кольца; G - карданное кольцо; М - электродвигатель; Р - равнодействующая инерционных сил (ma -масса и ускорение); Mвр - момент вращения; N - барабан, управляющий поворотом гироскопа Г2; wг - угловая скорость прецессии гироскопа |
С осью EF акселерометра связан барабан N, управляющий поворотом того гироскопа автопилота, который осуществляет наклон продольной оси ракеты относительно горизонта. Таким образом, кривизна траектории ракеты изменяется в зависимости от ее скорости в соответствии с расчетным движением.
Нужно учесть, что если в результате воздействия ветра, потока микрометеоритов или других причин продольная ось ракеты переместится параллельно самой себе, то гироскопические приборы этого не почувствуют. Однако такое отклонение от траектории нежелательно так же, как, скажем, изменение угла тангажа или угла рыскания. Для исправления подобного роди отклонений, могущих возникнуть в полете, может быть использован метод, известный под названием «радиотропы». Он основан на использовании принципа радиолокации. Его сущность заключается в следующем.
Предположим, что на Земле имеются две станции, посылающие на ракету сигналы и принимающие обратно отражения этих сигналов.
Эти станции размещены таким образом и их аппаратура устроена так, что если ракета летит по правильному курсу, то обе эти станции будут принимать отраженные сигналы одинаковой величины.
Если по каким-либо причинам ракета отклонится от курса, то одна из станций будет воспринимать больший по величине сигнал, а другая - меньший. На наземной станции по этой разности сигналов с помощью счетно-решающих приборов точно и мгновенно подсчитывается величина этого отклонения от курса и немедленно вырабатывается соответствующий ей управляющий сигнал, который по радио передается на приборы управления ракеты.
Следовательно, имеется возможность направлять ракету и таким способом.
Однако метод радиотропы оказался недостаточно удовлетворительным, особенно при управлении полетом ракеты на большие расстояния. Кроме ограниченной дальности действия, управление ракеты по радиотропе может быть ненадежным вследствие воздействия искусственных и естественных радиопомех. В последнее время для управления ракетами и самолетами стали применять автономные средства ориентировки - инерциальные гироскопические и астрономические ориентаторы. Эти ориентаторы имеют различное устройство, но принцип действия их один и тот же: измеряются с помощью акселерометров ускорения ракеты, затем эти ускорения интегрируются по времени, в результате чего получается скорость полета. Интегрирование скорости по времени дает возможность получить пройденный ракетой путь и координаты местонахождений. Принцип действия астроинерциального ориентатора можно уяснить на простейшей схеме (рис. 27).
 Рис. 27. Схема, поясняющая принцип действия астроинерциального ориентатора; Д - двигатель; С - редуктор; h0 - высота светила: А и В - места нахождения астроинерциального ориентатора; aпер - угол, определяющий положение платформы ориентатора (равный пройденному ракетой пути, деленному на радиус Земли) |
Представим себе телескоп, установленный на ракете и автоматически следящий за звездой. Поскольку звезда удалена от Земли на огромное расстояние и лучи света, идущие от звезды, параллельны друг другу, то при перемещении телескопа из точки А в точку В его ось остается параллельной самой себе. К телескопу прикреплена на шарнире платформа, на которой помещены акселерометр и двигатель Д, связанный через редуктор С с телескопом. Акселерометр измеряет ускорения вдоль плоскости платформы.
Сигналы акселерометра интегрируются двумя последовательно включенными интеграторами. На выходе первого интегратора получаем скорость, а на выходе второго - пройденный путь. Двигатель Д поворачивает платформу на угол aпер, который определяется как пройденный путь, деленный на радиус Земли. В результате если перед вылетом (в точке А) платформа была установлена точно горизонтально, а высота светила была равна углу h0, то в процессе полета платформа непрерывно поворачивается двигателем Д на угол aпер, и высота светила равна h0+aпер. При этом платформа во время полета сохраняет строго горизонтальное положение независимо от того, какие ускорения возникают в процессе полета ракеты. На рис. 27 было показано движение ракеты только в одной плоскости. Для получения величин и направлений скорости полета и пройденного пути используют два аналогичных устройства, направленных своими телескопами на два небесных светила. Поскольку каждое из этих устройств измеряет ускорение, скорость и путь в определенном направлении, то полная скорость и путь определяются как геометрическая равнодействующая из измеренных составляющих скорости и пути. Платформа с акселерометром в процессе полета сохраняет горизонтальное положение. Благодаря этому акселерометр не измеряет вертикальной составляющей ускорения, вызванного силой тяжести.
Если платформа имеет какое-либо начальное отклонение (угол b) относительно горизонтальной плоскости, то акселерометр будет измерять составляющую ускорения силы тяжести (g·sin b), которая проектируется на плоскость платформы (рис. 28). Интеграторы будут интегрировать эту составляющую, а двигатель Д (на рис. 27) поворачивать платформу в сторону уменьшения угла b. В момент подхода платформы к горизонтальному положению составляющая ускорения (g·sin b) будет равна нулю, но движение платформы не прекратится, так как первый интегратор накопит за это время наибольший сигнал. Под действием этого сигнала второй интегратор будет продолжать свою работу и заставит двигатель Д отклонять платформу в другую сторону относительно горизонтальной плоскости. В результате этого устанавливаются периодические незатухающие колебания с периодом 84,4 мин. (если ракета летит у поверхности Земли) и амплитудой, равной начальному углу отклонения платформы от горизонтальной плоскости.
 Рис. 28. Возникновение периодических незатухающих колебаний платформы астроинерциального ориентатора: g sin b - проекция ускорения силы тяжести на плоскость платформы ориентатора |
Интересно отметить, что таким же периодом колебаний обладает математический маятник (у такого маятника вся масса сосредоточена в одной точке), имеющий длину подвеса, равную радиусу Земли. Такой же период обращения вокруг Земли имел бы и спутник, если осуществить его полет на одинаковой с маятником высоте. Маятники с периодом 84,4 мин. обладают тем свойством, что они не раскачиваются от инерционных сил, возникающих при движении точки их подвеса.
Свойством такого маятника и обладает платформа с акселерометром астроинерциального ориентатора. Телескоп, следящий за небесным светилом, играет роль устройства, сохраняющего неизменным направление своей оси в мировом пространстве. В гироинерциальном ориентаторе вместо телескопа используется гироскоп, который благодаря своему свойству устойчивости может также сохранять неизменным положение оси вращения в мировом пространстве. Однако по сравнению с астроинерциальпым ориентатором гироинерциальный ориентатор совершенно не зависит от внешних условий полета и с этой точки зрения является абсолютно автономным. Но для получения высокой точности измерений скорости полета и пройденного ракетой расстояния гироинерциальный ориентатор должен иметь гироскопы с очень малым уходом от сил трения в опорах подвеса и разбалансировки. Если гироскоп имеет уход 1° в час, то гироинерциальный ориентатор будет давать погрешность в измерении пройденного расстояния, равную дуге в 1° на земной поверхности или 111 км за каждый час полета.
 Рис. 29. Блок-схема управления полетом ракеты-носителя ИСЗ с помощью автономных средств навигации |
Для гироориентаторов разрабатываются специальные гироскопы высокой точности, в которых вращающийся ротор-гироскоп помещается в герметичный поплавок, плавающий в жидкости с большим удельным весом. Подъемная сила поплавка подбирается равной его весу, благодаря чему давление в опорах кардана практически отсутствует, а вместе с этим исчезают и силы трения в опорах. Такие «плавающие» гироскопы и используются в ориентаторах, автопилотах и других автоматических устройствах на самолетах и ракетах.
Управление полетом ракеты с помощью автономных средств навигации сводится к следующему (рис. 29).
Задатчик программы задает траекторию, по которой должна лететь ракета. Астроинерциальный ориентатор (или гироинерциальный ориентатор) и высотомер измеряют фактические координаты местонахождения ракеты относительно Земли.
Если фактическое положение ракеты отличается от заданного, то возникает разность сигналов между задатчиком программы и измерителями координат местонахождения. Эта разность координат в виде электрических сигналов подается на автопилот, который управляет рулями ракеты таким образом, чтобы возвратить ракету в заданное программой место. Конструктивные параметры автопилота обычно подбираются таким образом, чтобы процесс управления ракетой на траектории происходил плавно, без больших отклонений и с затухающими колебаниями. Процесс управления полетом ракеты по заданной траектории связан с решением ряда сложных математических задач. Решение этих задач с помощью старой вычислительной техники, основанной на применении счетно-решающих устройств непрерывного действия, приводит к тому, что объем и вес вычислительной машины может возрасти до недопустимо больших размеров, а это особенно сильно отражается на летных свойствах ракеты. На современных и перспективных ракетах предполагают устанавливать дискретные цифровые вычислительные устройства, основанные на использовании полупроводниковых элементов и кристаллических диодов и триодов. Такие вычислительные устройства позволяют решать математические задачи с неограниченной точностью, чего нельзя получить от вычислительных устройств непрерывного действия, а их конструкция может быть компактной, небольшого веса и с незначительным потреблением электроэнергии.
Мы остановились только на самых важных приборах ракеты-носителя. В действительности их может быть гораздо больше, и все процессы, связанные с управлением полета ракеты, будут значительно более сложными. Необходимо иметь в виду также, что во всех странах мира усиленно работают над отдельными типами таких приборов и над методами осуществления различных этапов управления. Приборы, которые три - четыре года тому назад считались совершенными, в настоящее время благодаря огромному прогрессу в данной области уже устарели. Можно сказать, что каждый день приносит в этой области что-либо новое.
Запуск в Советском Союзе искусственных спутников Земли мог быть осуществлен лишь с помощью совершенных, чувствительных, точных и надежных автоматических приборов управления ракетой.
В статье, опубликованной в газете «Вашингтон пост энд Таймс геральд», американцы вынуждены признать, что советские ученые создали и применили электронные компоненты и механические устройства, над которыми ученым Соединенных Штатов все еще приходится работать. Об этом убедительно говорит успешный вывод советского спутника на орбиту, при котором ни один компонент ракеты «не может сработать неправильно, не поставив под угрозу весь полет».
В Соединенных Штатах считают, что даже ошибка, равная плюс или минус одному градусу угла орбиты, привела бы к неудаче. Успешный запуск советского спутника означает, что построенный русскими электронный мозг работал безупречно в моменты полета, корректируя любые отклонения и бесперебойно отделяя различные части ракеты-носителя. По общему мнению, создание спутника навеки уничтожило «западное представление» о том, что «русские не могут сравниться с Соединенными Штатами в области электроники».