19-й запуск спутников Iridium М.Тарасенко. «Новости космонавтики» 19 декабря 1998 г. в 11:30 UTC с Космического центра Тайюань (КНР) осуществлен запуск РН CZ-2C/SD с двумя спутниками связи Iridium, принадлежащими одноименной международной компании. Через 50 минут после старта спутники, получившие в системе Iridium обозначения Iridium 11A и Iridium 20A, были отделены от блока разведения SD (Smart Dispenser) и вышли на начальные орбиты с параметрами, близкими к расчетным. Наименования, обозначения и параметры начальных орбит КА (высоты даны относительно сферы радиусом 6378.14 км) приведены в таблице.
Спутники Iridium 11А и Iridium 20А предназначены для восполнения орбитальной группировки системы глобальной персональной мобильной спутниковой связи Iridium. Им присвоены те же системные номера, что и вышедшим из строя спутникам Iridium 11 и Iridium 20, запущенным в 1997 г. Однако замена не является прямой. Отказавшие спутники 11 и 20 расположены в 5-й и 6-й орбитальных плоскостях системы, тогда как спутники 11А и 20А выведены во 2-ю рабочую плоскость. Как сообщил редакции НК Пол Мэли (США), системный номер спутника Iridium не привязывается к конкретной орбитальной позиции или даже плоскости. Тот факт, что до сих пор в большинстве случаев он совпадал с производственным номером спутника, не является законом. Производящая спутники компания Motorola, по-видимому, старалась по возможности выдерживать этот принцип для уменьшения путаницы. Тем большее смятение вызвали первые случаи нарушения этого правила: когда спутник с серийным номером SV078 получил системный номер 3, а SV087 — номер 2; большинство наблюдателей, включая нас, решило, что Motorola начала переделывать наземные отработочные изделия SV001-SV003 в летные. Спутники 11А и 20А имеют производственные номера SV088 и SV089 соответственно. В дальнейшем по мере обновления группировки разнобой системных и производственных номеров станет привычным. Запуск 19 декабря стал 19-м в рамках создания системы Iridium и пятым из шести парных запусков КА Iridium, заказанных компанией Motorola у китайской компании Great Wall Industrial Co. По сообщениям Iridium LLC и Дж.МакДауэлла | ||||||||||||||||||

А.Владимиров. «Новости космонавтики»
30 декабря в 21:35:46.23 ДМВ (18:35:46 UTC) с 39-й (левой) пусковой установки 200-й площадки космодрома Байконур боевыми расчетами РВСН МО РФ произведен запуск ракеты-носителя 8К82К «Протон-К» серии 385-02 с космической головной частью в составе разгонного блока 11С861 №92л и трех искусственных спутников Земли типа «Ураган» (серийные номера 79л, 84л и 86л). Аппараты получили официальные наименования «Космос-2362, -2363 и -2364».
Спутники запущены в интересах Министерства обороны Российской Федерации в целях восполнения Глобальной навигационной спутниковой системы (ГЛОНАСС). Аппараты выведены на орбиты с параметрами:
| Космос-2362 | Космос-2363 | Космос-2362 | |
| Наклонение орбиты, ° период обращения, мин минимальная высота, км максимальная высота |
64,82 675,5 19117 19134 |
64,82 675,5 19119 19130 |
64,80 675,6 19120 19133 |
Согласно сообщению Мирового центра данных по ракетам и спутникам, космическим аппаратам «Космос-2362, -2363, -2364» присвоены международные регистрационные обозначения 1998-077A, 1998-077B и 1998-077C соответственно. В каталоге Космического командования США они получили номера 25593, 25594 и 25595.
В связи с тем, что предыдущий запуск тройки КА «Ураган» состоялся три года назад, многие читатели наверняка с интересом «освежат» свои знания об этих аппаратах и системе ГЛОНАСС в целом. Кроме того, за прошедшие годы в открытых публикациях появилось достаточно много информации об истории создания системы, ее развитии и перспективах.
Экскурс в историю
В декабре 1976 г. было принято Постановление ЦК КПСС и Совета Министров СССР «О развертывании Единой космической навигационной системы ГЛОНАСС (ГЛОбальная НАвигационная Спутниковая Система)». Это постановление по сути лишь узаконило уже начавшиеся работы по созданию новой системы и определило порядок ее разработки и испытаний.
Технические предложения по системе ГЛОНАСС в составе КА 11Ф654 «Ураган» были разработаны в красноярском НПО прикладной механики (НПО ПМ) в начале 1976 г. и рассмотрены межведомственной комиссией в августе того же года.
Система ГЛОНАСС представляет второе поколение отечественных спутниковых навигационных систем. Создание этой навигационной системы было предопределено потребностями новых потенциальных потребителей, нуждавшихся в высокоточной привязке своего положения во времени и пространстве. В качестве таких потребителей выступали авиация, морской флот, наземные транспортные средства, космические аппараты, а также специальные боевые комплексы (в частности, мобильные МБР средней и большой дальности).
Широкое внимание к спутниковой навигации привлекла успешная эксплуатация низкоорбитальных навигационных спутниковых систем морскими потребителями. В 1976 г. на вооружение Советской Армии была принята навигационно-связная система «Циклон-Б» в составе шести космических аппаратов «Парус», обращающихся на околополярных орбитах высотой 1000 км. Через три года была сдана в эксплуатацию спутниковая радионавигационная система (СРНС) «Цикада» в составе четырех КА на орбитах того же класса, что и у КА «Парус». И если первая система использовалась исключительно в интересах МО СССР, то вторая предназначалась, главным образом, для навигации гражданских морских судов. Оснащение спутниковой навигационной аппаратурой судов торгового флота оказалось очень выгодным, поскольку благодаря повышению точности судовождения удавалось настолько сэкономить время плавания и топливо, что бортовая аппаратура потребителя окупала себя после первого же года эксплуатации.
В ходе испытаний этих и предшествовавшей им системы «Циклон» было установлено, что погрешность местоопределния движущегося судна по навигационным сигналам этих спутников составляет 250… 300 м. Выяснилось также, что основной вклад в погрешность навигационных определений вносят погрешности передаваемых спутникам собственных эфемерид, которые рассчитываются и закладываются на борт КА средствами наземного комплекса управления (НКУ). С целью повышения точности определения и прогнозирования параметров орбит навигационных спутников была отработана специальная схема проведения измерений параметров орбит средствами НКУ, разработаны более точные методики прогнозирования. Для выявления локальных особенностей гравитационного поля Земли, оказывающих воздействие на выбранные орбиты навигационных КА (НКА), на такие же орбиты были запущены специальные геодезические спутники «Космос-842» и «Космос-911». Комплекс принятых мер позволил уточнить координаты измерительных средств и вычислить параметры согласующей модели гравитационного поля, предназначенной специально для определения и прогнозирования параметров движения НКА. В результате точность передаваемых в составе навигационного сигнала собственных эфемерид была повышена практически на порядок, так что их погрешность на интервале суточного прогноза не превышала 70…80 м. Как следствие, погрешность определения морскими судами своего местоположения уменьшилась до 80…100 м.
Однако выполнить требования всех потенциальных классов новых потребителей низкоорбитальные системы не могли в силу принципов, заложенных в основу их построения. Так, если для неподвижных потребителей, имеющих двухканальную приемную аппаратуру, погрешность определения местоположения удалось снизить до 32 м (данные для американской СРНС «Транзит»), то при движении погрешности сразу же начинают возрастать из-за неточности счисления пути — низкоорбитальные СРНС не позволяли определять скорость движения. Более того, по получаемым измерениям можно определить только две пространственные координаты. Вторым недостатком низкоорбитальных систем было отсутствие глобальности покрытия, поскольку, например, на экваторе спутники проходили через зону видимости потребителя в среднем через 1.5 часа, что допускает проведение только дискретных навигационных сеансов. Наконец, ввиду использования в сеансе лишь одного НКА продолжительность измерений может доходить до 10…16 мин. Большая длительность сеансов и значительные интервалы между ними делают неизбежным применение специальных мероприятий для счисления пути. При этом ошибки счисления и ограничивают точность местоопределения. Тем не менее была испытана самолетная аппаратура применительно к сигналам как системы «Транзит», так и «Цикада». При этом подтвердилось, что погрешность определения местоположения слабо зависит от маневров самолета и действительно определяется преимущественно погрешностями знания путевой скорости, не выходя за пределы 1.8 км.
СРНС второго поколения изначально проектировались как системы, которым все перечисленные недостатки не свойственны. Главным требованием при проектировании было обеспечение потребителю в любой момент времени возможности определения трех пространственных координат, вектора скорости и точного времени, что достигается путем одновременного приема сигналов от как минимум четырех НКА. В конечном итоге, это привело к реализации важной технической идеи — координации пространственного положения НКА на орбитах и координации по времени излучаемых спутниками сигналов. Координация движения всех НКА придает системе сетевые свойства, которых она лишается при отсутствии коррекции положения НКА.
В качестве орбит для новой системы первоначально были выбраны средневысокие (20000 км) полусуточные орбиты, которые обеспечивали оптимальное соотношение между количеством КА в системе и величиной зоны радиообзора. Однако впоследствии высота рабочей орбиты была уменьшена до 19100 км. Это было сделано исходя из того, что для КА, имеющих период обращения, равный половине суток, проявляется резонансный эффект влияния определенных гармоник геопотенциала, приводящий к достаточно быстрому «разрушению» заданного относительного положения НКА и конфигурации системы в целом. Очевидно, что в этом случае для поддержания системы пришлось бы чаще проводить коррекции орбиты каждого КА. При выбранной высоте орбиты для гарантированной видимости потребителем не менее четырех спутников их количество в системе должно составлять 18, однако оно было увеличено до 24-х с целью повышения точности определения собственных координат и скорости потребителя путем предоставления ему возможности выбора из числа видимых спутников четверки, обеспечивающей наивысшую точность. Следует отметить, что в настоящее время это требование потеряло актуальность, поскольку современная стандартная навигационная аппаратура потребителя (НАП) имеет возможность принимать сигналы от 8 до 12 НКА в зоне радиовидимости одновременно, что позволяет не заботиться о выборе оптимальной четверки, а просто обрабатывать все принимаемые измерения.
Одной из главных проблем создания СРНС, обеспечивающей беззапросные навигационные определения одновременно по нескольким спутникам, является проблема взаимной синхронизации спутниковых шкал времени с точностью до миллиардных долей секунды (наносекунд, нс), поскольку рассинхронизация излучаемых спутниками навигационных сигналов всего в 10 нс вызывает дополнительную погрешность в определении местоположения потребителя до 10…15 м. Для решения задачи высокоточной синхронизации бортовых шкал времени потребовалась установка на спутниках высокостабильных цезиевых стандартов частоты и наземного водородного стандарта (на порядок более стабильного), а также создания наземных средств сличения шкал с погрешностью 3…5 нс.
В 1977-78 гг. в НПО ПМ проводилось эскизное проектирование системы, материалы которого были одобрены в сентябре 1978 г. межведомственной комиссией под председательством генерал-майора И. В. Мещерякова. Тактико-техническое задание (ТТЗ) на систему ГЛОНАСС было согласовано с главнокомандующими всех видов Вооруженных Сил и министерствами: Минобщемашем, Минрадиопромом, Минавиапромом, Миноборонпромом, Минморфлотом, Минрыбхозом, Минсудпромом и Министерством гражданской авиации. В ноябре 1978 г. ТТЗ было утверждено Министром обороны СССР.
Однако к тому времени из-за слишком долгого периода согласования задания были сорваны первоначальные сроки по развертыванию системы. Поэтому 29 августа 1979 г. по ГЛОНАСС вышло новое Постановление ЦК и СМ. В нем были установлены следующие сроки выполнения работ по системе:
— начало летных испытаний и создание системы из 4-6 КА «Ураган» для проверки основных принципов и технических характеристик — 1981 год;
— создание системы из 10-12 КА «Ураган» (в двух орбитальных рабочих плоскостях) и сдача ее на вооружение в составе и с тактико-техническими характеристиками по согласованию между Минобороны, Минобщемашем и Минрадиопромом — 1984 год; — дооснащение системы до 24 КА — 1987 год.
Основными разработчиками системы в Постановлении были определены:
— НПО ПМ Минобщемаша — по системе в целом;
— ПО «Радиоприбор» (ныне РНИИ КП) Минобщемаша — по наземному комплексу управления, бортовому радиотехническому комплексу, аппаратуре потребителей;
— ЛНРТИ (ныне РИРВ) Минрадиопрома — по навигационно-временному комплексу.
Однако и эти порядок и сроки пришлось еще раз уточнить в июле 1981 г. В новом Постановлении ЦК и СМ сроком начала развертывания системы был назван 1982 г.
Летные испытания системы ГЛОНАСС были начаты 12 октября 1982 г. запуском первого КА 11Ф654 «Ураган» №11л и двух габаритно-весовых макетов 11Ф654ГВМ. Затем в последующих шести запусках на орбиту выводились по два штатных КА и одному ГВМ. Это было связано с неготовностью электронной аппаратуры спутников. Лишь с восьмого запуска в рамках развертывания системы ГЛОНАСС (16 сентября 1986 г.) на орбиту были выведены сразу три штатных КА. Дважды (10 января и 31 мая 1989 г.) вместе с двумя КА «Ураган» на орбиту выводились пассивные геодезические КА ПКА «Эталон», используемые для уточнения параметров гравитационного поля и его влияния на орбиты КА «Ураган».
 Рис. 1 Общий вид КА «Ураган» 1 — прибор ориентации по курсу; 2 — жалюзи СТР; 3 — передающая слабонаправленная антенна КИС; 4 — приемная слабонаправленная антенна КИС; 5 — магнитометры разгрузки маховиков; 6 — панель солнечной батареи; 7 — модули навигационных передатчиков; 8 — передающая направленная антенна КИС; 9 — передающая слабонаправленная антенна КИС; 10 — приемная слабонаправленная антенна КИС; 11 — 12-элементная антенна навигационной аппаратуры; 12 — прибор ориентации на Землю; 13 — панель уголковых оптических отражателей; 14 — датчик ориентации на Солнце |
Для отработки навигационной аппаратуры были изготовлены базовые комплекты по шесть штук каждого наименования для ВВС, ВМФ, СВ, МГА, ММФ и РВСН. Всего для летных испытаний было выделено 22 космических аппарата (9-10 запусков). Это число КА было израсходовано к 16 сентября 1987 г. Однако к этому моменту система не была развернута даже для ограниченного использования (12 КА в двух плоскостях). Лишь после запуска 4 апреля 1991 г. в составе ГЛОНАСС оказалось одновременно 12 работоспособных КА.
24 сентября 1993 г. первая очередь системы ГЛОНАСС была принята на вооружение. С этого момента стали проводиться запуски КА в третью орбитальную плоскость. 14 декабря 1995 г. после 27-го запуска «Протона-К» с «Ураганами» развертывание штатной конфигурации системы ГЛОНАСС было завершено.
Запуск 30 декабря 1998 г. стал 28-м запуском спутников системы ГЛОНАСС. Всего с октября 1982 г. на орбиту были выведены 74 КА «Ураган» и восемь его габаритно-весовых макетов (ГВМ). За время развертывания системы шесть «Ураганов» оказались на нерасчетных орбитах из-за отказов разгонного блока 11С861. Данные о всех запусках приведены в таблице в конце статьи.
По оценкам, проведенным в 1997 г., на развертывание системы было потрачено почти 2.5 млрд $.
Космические аппараты
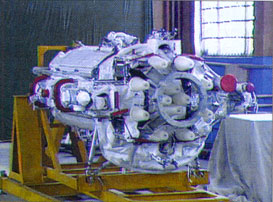
Основой системы ГЛОНАСС являются спутники 11Ф654 «Ураган». Масса первых КА составляла 1415 кг, нынешние аппараты имеют массу около 1450 кг, при этом масса конструкции составляет всего 237 кг. Диаметр гермоконтейнера равен 2350 мм, длина КА с раскрытой штангой магнитометра — 7840 мм, а размах панелей солнечных батарей (СБ) — 7230 мм. Основой КА служит цилиндрический герметичный контейнер, в котором размещаются служебные системы и специальная аппаратура. С двух сторон контейнер закрыт эллиптическими днищами. На «нижнем» (в положении штатной ориентации) днище КА смонтирована платформа с антенно-фидерными устройствами и панелью уголковых отражателей (установлена не на всех спутниках), на «верхнем» — топливные баки и штанга магнитометра. На боковой поверхности гермоотсека закреплены два привода системы одноосной ориентации панелей СБ, два раскрывающихся на орбите радиатора системы терморегулирования, два блока двигателей ориентации и датчики ориентации. В число систем, установленных на борту спутника, входят:
— бортовой навигационный передатчик (БНП);
— бортовой хронизатор (БХ);
— бортовой управляющий комплекс (БУК);
— система ориентации и стабилизации (СО);
— система коррекции;
— система электропитания (СЭП);
— система терморегулирования (СТР);
— бортовые средства заправки и обеспечения параметров среды в гермоконтейнере;
— элементы конструкции и кабельная сеть.
Гарантийный срок активного функционирования КА составляет 3 года. Общий вид КА представлен на рис. 1.
Аппаратура КА «Ураган» предназначена для выполнения следующих функций, обеспечивающих высокое качество координатно-временных измерений:
 КА «Ураган» в арсенале ВКС Съемки ТО «Видеокосмос», сентябрь 1994 |
— излучения высокостабильных навигационных радиосигналов двух типов — стандартной точности (СТ или CSA) без преднамеренного ухудшения характеристик и высокой точности (ВТ) в дециметровом диапазоне волн;
— приема, хранения, формирования и передачи навигационной информации (данных);
— формирования, оцифровки, хранения и передачи сигналов времени;
— ретрансляции или излучения сигналов для радиоконтроля орбиты спутника и определения поправок к бортовой шкале времени;
— приема, квитирования, дешифровки и отработки разовых команд;
— приема, запоминания и отработки программ управления режимами функционирования спутника на орбите;
— формирования телеметрических данных о состоянии бортовой аппаратуры и передачи их в подсистему контроля и управления (ПКУ);
— приема и обработки кодов коррекции и фазирования бортовой шкалы времени;
— выработки и передачи сигналов «Вызов НКУ» при сбое или выходе важных контролируемых параметров за пределы нормы;
— анализа состояния бортовой аппаратуры (совместно с ПКУ) и выработки управляющих команд. Для каждого КА предусмотрено два режима применения: номинальный (штатный) и профилактический. В номинальном режиме НКА находится в составе орбитальной группировки и излучает навигационные сигналы. В профилактическом режиме НКА выводится из группировки для проведения профилактических работ по обслуживанию бортовых систем.
Бортовой навигационный передатчик предназначен для формирования и излучения высокостабильных фазоманипулированных радиосигналов в полосе частот L2 (1246.4375…1256.5 МГц) и L1 (1602.5625 …1615.5 МГц). Для каждого КА отношение частот в диапазонах L1 и L2 составляет 9:7. Первоначально прорабатывался вариант размещения двух передатчиков навигационного сигнала, излучающих в надир (для наземных пользователей и КА на низких орбитах) и в зенит (для КА на геостационарных орбитах). Однако в итоге остался лишь один «нижний» навигационно-временной комплекс. Это позволило снизить затраты на изготовление и без того дорогостоящей аппаратуры КА.
При работе КА «Ураган» были отмечены помехи, создаваемые ими при проведении наземных радиоастрономических наблюдений в полосе частот 1610.6…1613.8 МГц. Кроме того, полоса частот 1610.6…1626.5 М Гц распределена на первичной основе спутниковой службе распределения и службе мобильной космической связи при работе в направлении «Земля-борт», а полоса частот 1613.8…1626.5 МГц распределена службе мобильной космической связи в направлении «борт-Земля» на вторичной основе. В связи с этим, начиная с сентября 1993 г. проводится поэтапное смещение и сокращение занимаемого системой диапазона частот. При этом принцип частотного разделения навигационных радиосигналов сохраняется, но общее число частот будет сокращено до двенадцати. Чтобы исключить возможность возникновения помех внутри системы ГЛОНАСС, в модернизированной системе навигационные радиосигналы, излучаемые на одной и той же частоте, будут формироваться спутниками, находящимися в противоположных точках орбиты.
Навигационный сигнал диапазона L1 содержит код дальности, метки бортовой шкалы времени и навигационные данные (эфемериды, поправки времени, частоты и фазы бортового стандарта частоты). Навигационный сигнал диапазона L2 содержит только код дальности и предназначен для исключения влияния ионосферной рефракции радиоволн на точность измерений навигационных параметров военными потребителями.
БНП включает в свой состав аппаратуру формирования навигационных сигналов, основная часть которой расположена в гермоконтейнере, и антенно-фидерную систему, конструктивно представляющую собой решетку, состоящую из двух групп спиральных излучателей: центральной (четыре излучателя) и периферийной кольцевой (восемь излучателей на кольце диаметром 850 мм).
Бортовой хронизатор предназначен для непрерывной выдачи высокостабильных синхрочастот в системы спутника, а также для формирования, хранения и выдачи бортовой шкалы времени (БШВ). В состав БХ входят атомный стандарт частоты (три комплекта) и устройство формирования синхрочастот и шкал времени.
В состав бортового управляющего комплекса входят следующие системы и приборы: бортовая аппаратура командной системы (АКС); бортовой вычислительный комплекс (БВК); бортовая телеметрическая система (БТС) и блок управления (БУ).
АКС обеспечивает решение следующих задач: измерение параметров орбиты КА в радиодиапазоне (погрешность измерений дальности — 3 м) и оптическом диапазоне (погрешность измерений — 0.3 м); исполнение разовых команд для управления системами спутника; обработку временных программ; прием, формирование и передачу сигналов БШВ; выдачу навигационной информации; передачу телеметрической информации; ретрансляцию информации обмена между наземными средствами.
БВК предназначен для запоминания и обработки навигационной информации; формирования навигационных кадров и выдачи их в БНП; контроля состояния БНП и переключения его комплектов; запоминания и выдачи кодов временных программ и скачков в командно-измерительную систему; формирования и выдачи сигнала «Вызов НКУ»; автономного тестового контроля работоспособности аппаратуры БВК с выдачей сообщения по телеметрическим каналам; формирования и выдачи «отчета БВК» по навигационному каналу при аварийной ситуации в БВК и выведения КА из режима эксплуатации (для анализа ситуации на наземных станциях); пересчета информации об изменении задержки дальномерного сигнала и переключения комплектов БНП; формирования в навигационном кадре признака непригодности спутника к использованию потребителями при отказе БУ.
БУ КА обеспечивает включение спутника после выведения на орбиту, подачу питания на пиропатроны для расчековки механических систем после отделения КА от РБ. БУ распределяет питание между всеми электроприборами, координирует совместную работу подсистем при проведении режимов коррекции, разгрузки управляющих маховиков, а также осуществляет управление системами КА в аварийных ситуациях при потере ориентации или отказах системы электропитания.
Система ориентации и стабилизации КА предназначена для успокоения колебаний спутника и обеспечения начальной ориентации на Солнце и на Землю; построения ориентации продольной оси на центр Земли, а солнечных батарей на Солнце; ориентации вектора тяги двигателей коррекции орбиты для выдачи импульса. КА «Ураган» используют активную трехосную СО с управляющими маховиками и реактивной системой разгрузки. В состав СО входят чувствительные (блок измерения угловых скоростей, приборы ориентации на Землю и Солнце, приборы солнечной ориентации по каналу рыскания, магнитометры) и исполнительные (электромеханический исполнительный орган, привод вращения панелей СБ, электромагнитные устройства, стабилизирующий маховик, двигательная установка, блок управления) элементы. Система ориентации и стабилизации работает в следующих режимах: успокоения; начальной ориентации на Солнце; закрутки вокруг поперечной оси; начальной ориентации на Землю; ориентации на Землю; ориентации при проведении коррекции. Точность ориентации продольной оси КА составляет 0.5-1°, панелей СБ — 5°, а вектора тяги — 5…11°.
Перевод каждого спутника в заданную рабочую точку проводится с помощью КДУ (два симметричных блока). Тяга каждого двигателя коррекции составляет 5 Н, а двигателя стабилизации — 0.1 Н.
Две панели СБ КА обеспечивают рабочую мощность 1250 Вт в начале срока активного функционирования, составляющего 3-5 лет.
В процессе функционирования КА последовательно находится в следующих режимах работы: ожидания после выведения на орбиту; начальной ориентации; приведения в расчетную точку; штатного функционирования.
КА запускаются по три штуки одним носителем. Длительность выведения на начальную орбиту составляет обычно около 4 час 10 мин. После выведения по команде, выдаваемой разгонным блоком непосредственно после выключения ДУ, включается электропитание некоммутируемых шин питания и дежурные схемы спутников. Через 15 сек после этого система управления РБ выдает команду на отделение спутников. Эта операция осуществляется для трех КА синхронно с их закруткой с угловой скоростью не более 27°/с. Процесс отделения спутников контролируется с помощью телеметрической системы РБ. На каждом спутнике при его отделении формируется команда «Контакт отделения», по которой он переводится в режим ожидания. В этом режиме при прохождении КА в зоне радиовидимости (ЗРВ) средств НКУ обеспечивается прием команд управления и передачи телеметрических данных. Длительность функционирования КА в режиме ожидания составляет до трех суток.
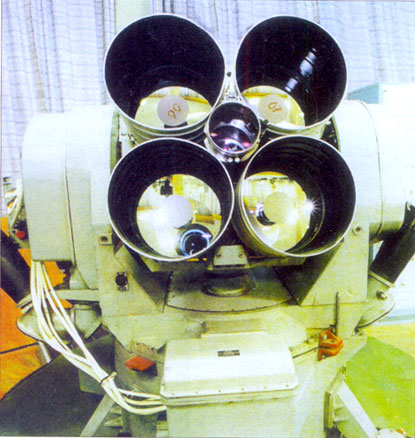 Кванто-оптическая станция (КОС) «Сажень-Т» |
Перевод спутника в режим начальной ориентации происходит в ЗРВ наземных средств в следующей последовательности: раскрытие панелей СБ и штанги магнитометра; успокоение спутника; начальная ориентация СБ на Солнце и КА — на Землю. В процессе успокоения осуществляется торможение вращательного движения КА с помощью ДУ и разворот панелей СБ для установки их в плоскости, совпадающей с продольной осью КА, и выставки их активной поверхностью в одну сторону. В режиме начальной солнечной ориентации осуществляется разворот вокруг продольной оси с помощью маховиков до попадания Солнца в поле зрения приборов солнечной ориентации с последующим переводом в закрутку вокруг оси, ориентированной на Солнце. Режим начальной ориентации на Землю проводится в ЗРВ НКУ на участках орбиты, где угол «Солнце-НКА-Земля» составляет 90±18°. При этом обеспечивается торможение вращения КА и его разворот с помощью управляющих двигателей-маховиков вокруг направления, ориентированного на Солнце до попадания Земли в поле зрения прибора ориентации на Землю. После этого включается режим поддержания ориентации на Солнце и Землю одновременно. Начальная фаза функционирования, во время которой осуществляется проверка работоспособности всех бортовых систем и построение необходимой ориентации, может иметь продолжительность от 5 до 12 витков.
Приведение КА в заданную орбитальную позицию осуществляется в несколько этапов: определение параметров орбиты выведения и формирование программы приведения; выдача импульсов коррекции для обеспечения требуемой скорости смещения спутника относительно исходной орбиты; пассивное движение КА по орбите со смещением по аргументу широты в заданном направлении; выдача импульсов, обеспечивающих торможение движения спутника, и приведение его в заданную позицию; проведение измерений параметров рабочей орбиты. Время, затрачиваемое на приведение, составляет от одной недели до одного месяца и определяется начальным угловым положением в точке выведения относительно рабочей точки. После завершения всей программы приведения КА в заданное положение с требуемой точностью производится окончательное уточнение параметров орбиты, высокоточная синхронизация БШВ, расчет временных поправок и закладка их на борт. После этого КА может использоваться по целевому назначению.
Запуск новой тройки КА всегда осуществляется в одну из рабочих позиций, в которой остается один из новых спутников. Два других разводятся в соседние рабочие точки. При этом предварительно возможен перевод уже функционирующих КА в новую рабочую точку. Точность приведения спутника в заданную рабочую точку орбиты составляет: по периоду обращения 0.5 сек; по аргументу широты 1°; по эксцентриситету ±0.01; по наклонению орбиты ±0.3°.
Система ГЛОНАСС
Система ГЛОНАСС включает в себя космический и наземный сегменты.
Космический сегмент в штатном варианте состоит из 24 КА, обращающихся в трех орбитальных плоскостях по восемь КА, равномерно (с интервалом 45° по аргументу широты) разнесенных в каждой из плоскостей. Плоскости разнесены по долготе восходящего узла на 120°. Спутники в соседних орбитальных плоскостях сдвинуты на 15° по аргументу широты. Нумерация орбитальных плоскостей осуществляется по направлению вращения Земли, а нумерация орбитальных позиций КА на определенный момент времени — против их движения. При этом номера позиций с 1 по 8 относятся к первой орбитальной плоскости, с 9 по 16 — ко второй и с 17 по 24 — к третьей. Номинальный период обращения каждого КА составляет 11 ч 15 мин 44 с ± 5 с (675.73±0.08 мин), наклонение — 64.8±0.3°, эксцентриситет — 0±0.1.
 С учетом всех приведенных данных легко подсчитать, что интервал повторяемости трасс каждого КА (а следовательно, и ЗРВ потребителей) составляет ровно 17 витков (7 сут 23 ч 27 мин 28 с). За счет равномерности разнесения спутников в каждой плоскости и относительного фазирования плоскостей все КА системы движутся практически вдоль одной и той же трассы. Это свойство обеспечивает высокоточное определение орбит спутников и параметров вращения Земли при использовании региональной подсистемы контроля и управления (ПКУ), какой является НКУ системы ГЛОНАСС. Наземный сегмент системы ГЛОНАСС — ПКУ предназначен для контроля правильности функционирования, управления и информационного обеспечения всех КА системы и состоит из следующих взаимосвязанных стационарных элементов:
С учетом всех приведенных данных легко подсчитать, что интервал повторяемости трасс каждого КА (а следовательно, и ЗРВ потребителей) составляет ровно 17 витков (7 сут 23 ч 27 мин 28 с). За счет равномерности разнесения спутников в каждой плоскости и относительного фазирования плоскостей все КА системы движутся практически вдоль одной и той же трассы. Это свойство обеспечивает высокоточное определение орбит спутников и параметров вращения Земли при использовании региональной подсистемы контроля и управления (ПКУ), какой является НКУ системы ГЛОНАСС. Наземный сегмент системы ГЛОНАСС — ПКУ предназначен для контроля правильности функционирования, управления и информационного обеспечения всех КА системы и состоит из следующих взаимосвязанных стационарных элементов:
— центр управления системой ГЛОНАСС (ЦУС);
— центральный синхронизатор (ЦС);
— контрольные станции (КС);
— система контроля фаз (СКФ);
— кванто-оптические станции (КОС);
— аппаратура контроля навигационного поля (АКНП).
Наземный сегмент выполняет следующие функции:
— проведение траекторных измерений для определения и прогнозирования и непрерывного уточнения параметров орбит всех спутников;
— временные измерения для определения расхождения бортовых шкал времени всех спутников с системной шкалой времени системы, синхронизация БШВ каждого КА с временной шкалой ЦС и службы единого времени (СЕВ) путем фазирования и коррекции БШВ;
— формирование массива служебной информации (навигационных сообщений), содержащего спрогнозированные эфемериды, альманах и поправки к БШВ каждого КА и другие данные, необходимые для формирования навигационных кадров;
— передача (закладка) массива служебной информации в память бортовой ЭВМ каждого КА и контроль за его прохождением;
— контроль по телеметрическим каналам за работой бортовых систем спутников и диагностика их состояния;
— контроль информации в навигационных сообщениях КА, прием сигнала вызова НКУ;
— управление полетом спутников и работой их бортовых систем путем выдачи команд управления и передачи на борт временных программ, контроль прохождения этих данных;
— контроль характеристик навигационного поля;
— определение сдвига фазы дальномерного навигационного сигнала КА по отношению к фазе сигнала ЦС;
— планирование работы всех технических средств ПКУ, автоматизированная обработка и передача данных между элементами ПКУ.
В автоматизированном режиме решаются практически все основные задачи управления КА и контроля навигационного поля. Пожалуй, ГЛОНАСС является единственной отечественной системой, в которой действительно в полной мере реализованы идеи автоматизированного процесса управления КА — от планирования сеансов управления, расчета информации, передачи ее на пункты до автоматического наведения антенны, выдачи на борт команд и программ, приема и обработки телеметрии и т.п. Так что в начале 1996 г. при полном составе орбитальной группировки, по выражению управленцев, система работала как часы. Дежурная смена в ЦУС только периодически посматривала на экраны дисплеев для контроля происходящего процесса.
По состоянию на конец декабря 1998 г. в составе орбитальной группировки ГЛОНАСС находилось 11 рабочих КА. Еще четыре КА выведены из эксплуатации (причем один из них более года назад) и, по-видимому, уже не будут введены в систему. Один аппарат (системный номер 778) формально числится в резерве, однако возможность его штатной эксплуатации вызывает большие сомнения. Дело в том, что, во-первых, истек гарантийный трехгодичный ресурс КА, а, во-вторых, при наличии во второй плоскости трех неработающих КА до сих пор не было предпринято никаких видимых попыток заменить их «резервным».
ГЛОНАССовские страдания
Ю.Журавин. «Новости космонавтики»
С самого начала система ГЛОНАСС создавалась исключительно для военных пользователей. Однако по мере изучения опыта эксплуатации системы GPS в США и отечественная глобальная навигационная система в начале 90-х гг. стала рассматриваться как система двойного назначения. Использование кода свободного доступа могло принести гражданским пользователям огромные экономические выгоды.
Аналогичная американская система GPS используется сейчас для навигационно-временного обеспечения нескольких сотен тысяч гражданских потребителей. Более 60 частных компаний и фирм заняты разработкой и изготовлением 150 типов приемников (аппаратуры пользователей) системы GPS и некоторые потенциальные пользователи системы ГЛОНАСС закупают и используют американскую аппаратуру (морской, воздушный транспорт и геодезисты).
Постепенно система GPS стала распространяться во всем мире, в том числе и в России. Запаздывание с развертыванием массового производства навигационной аппаратуры для ГЛОНАСС лишило Россию всех экономических эффектов, связанных с использованием глобальной навигационной системы. В этой ситуации все отечественные потребители вынуждены покупать аппаратуру иностранного производства для системы GPS.
Радиолокационную информацию ДЗЗ скупают «на корню» М.Тарасенко. «Новости космонавтики» Только канадское правительство подписало соглашение с компанией MacDonald, Dettwiler and Associates Ltd. (MDA) на изготовление и эксплуатацию спутниковой системы RADARSAT-2, как американская компания Orbital Imaging приобрела права на продажу и распространение радиолокационной видеоинформации с этого спутника. Спутник радиолокационного зондирования Земли RADARSAT-2 должен быть запущен в ноябре 2001 г. и рассчитан на эксплуатацию, по крайней мере, до 2008 г. Спутник массой 1650 кг, выведенный на солнечно-синхронную орбиту высотой 800 км, должен обеспечить получение изображений с наземным разрешением от 3 до 100 м при ширине полосы от 20 до 500 км. Впервые коммерческая радиолокационная съемка будет вестись с использованием множественной поляризации, что расширит возможности по распознаванию объектов. По условиям соглашения, подписанного 18 декабря 1998 г., правительство Канады и компания MacDonald Dettwiler вложат в проект 225 и 80 млн $ соответственно. При этом 140 млн $, вкладываемых Канадским космическим агентством, рассматриваются как предоплата за будущие потребности правительства в данных. То есть, в отличие от других существующих систем ДЗЗ, RADARSAT-2 создается не по «госзаказу», а как коммерческая система, но с предоплатой государства за будущие услуги. Компания MacDonald, Dettwiler and Associates Ltd., расположенная в Ричмонде (Британская Колумбия), является филиалом корпорации Orbital Sciences (OSC), а Orbital Imaging Corporation (ORBIMAGE) — дочерним предприятием той же OSC, специализирующимся на эксплуатации коммерческих систем наблюдения Земли. В настоящее время ORBIMAGE эксплуатирует спутник для зондирования атмосферы OrbView-1, запущенный в 1995 г., и спутник многоспектрального наблюдения OrbView-2, запущенный в 1997 г. Кроме того, в 1999 г. планируется запуск спутника оптического наблюдения с высоким разрешением OrbView-3, а в 2000 г. — OrbView-4 с гиперспектральным сенсором. Добавление к этому перечню радиолокационного спутника RADARSAT-2, способного вести съемку круглосуточно и при любых погодных условиях, позволит ORBIMAGE дополнительно расширить спектр своих услуг и упрочить свое положение на рынке космической видеоинформации. Дополнительная информация может быть найдена на серверах: www.orbimage.com и www.mda.ca |
В России же, как всегда, вопрос встал не о возможности использования системы гражданскими потребителями, а о ведомственной принадлежности системы. Сразу после своего образования в 1992 г. РКА стало упорно добиваться того, чтобы, если не заполучить ГЛОНАСС в свое управление, то хотя бы организовать двухведомственное ее руководство.
10 марта 1994 г., практически сразу после принятия ГЛОНАСС на вооружение МО РФ, в РКА состоялось заседание Научно-технического совета (НТС) «по рассмотрению вопроса о перспективах использования космической навигационной системы (КНС) ГЛОНАСС в интересах гражданских потребителей». Как заявил НТС, причинами отставания в создании аппаратуры для гражданских пользователей ГЛОНАСС была ведомственная принадлежность системы МО РФ и закрытый характер работ (по срокам создания, основным характеристикам).
Тем временем система ГЛОНАСС стала потихоньку «сыпаться». Старые спутники выходили из строя, а на запуск новых не было средств. После завершения развертывания системы в декабре 1995 г. до последнего времени не было произведено ни одного запуска «Ураганов». В декабре 1998 г. последние три из выведенных ранее спутников перешагнули трехлетний гарантийный срок, то есть вся орбитальная группировка ГЛОНАСС оказалась загарантийной.
Оставшиеся на конец декабря 1998 г. работоспособными 11 спутников «Ураган» уже не могли обеспечить непрерывное навигационное обеспечение стратегических ядерных сил России. Тем самым оказывались бесполезными мобильные морские и наземные ракетные комплексы.
А стоимость возрождения системы ГЛОНАСС все росла и росла с каждым выходящим из строя аппаратом. Минобороны РФ, понимая, какая это для него сейчас непомерная ноша, само уже предложило РКА взять себе ГЛОНАСС. Однако и РКА, «увязшее» в финансировании Международной космической станции, не имело никаких собственных средств для поддержания в рабочем состоянии группировок автоматических КА, в том числе и навигационных. Поэтому начиная с 1997 г. проводятся бесконечные совещания в Правительстве и слушания в Парламенте о национальном достоянии России — Глобальной навигационной спутниковой системе.
Возможно, ГЛОНАСС совсем бы умер, но Россия договорилась с США о совместном использовании двух глобальных навигационных систем. Дополняя одна другую, системы могут вместе давать еще более точную навигационную информацию, чем каждая по отдельности. Учитывая это, и Европа тоже планирует создать свою собственную навигационную систему, использующую в том числе и аппараты ГЛОНАСС и GPS (об этих планах НК неоднократно писали). Видимо, эти международные программы и не дают российскому космическому руководству совсем забыть о ГЛОНАСС.
Подготовка нынешнего старта
Предыдущий запуск «Ураганов» состоялся 3 года назад — 14 ноября 1995 г. На 1996 г. вывод КА для системы ГЛОНАСС вообще не планировался. И только в июне 1997 г. в планах тогда еще ВКС впервые появились три «Урагана» с перспективой их запуска в сентябре того же года. Однако по графику от конца августа старт РН «Протон-К» серии 38201 с тремя «Ураганами» был назначен уже на 28-29 ноября. Были уже оформлены документы на переделку этой РН, ранее предназначавшейся для запуска КА «Глобус» (официально — «Радуга-1»).
График пусков «Протона-К» на конец 1997 г. был достаточно плотным. Многочисленные переносы коммерческих полезных нагрузок приводили к тому, что промежутки между двумя пусками РН сокращались до минимально возможного технологического срока 10-12 суток. В связи с этим даты стартов постоянно «ползли». К концу сентября целевой датой пуска «Ураганов» было 4 декабря.
Однако самая главная причина была не в носителе, а в самих аппаратах. Из-за отсутствия бюджетного финансирования в омском АКО «Полет» сборка и испытания очередной тройки «Ураганов» постоянно отставала от графика. Поэтому еще до аварийного запуска «Протона-К» с КА AsiaSat-3 25 декабря старт «Ураганов» был перенесен на II квартал 1998 г. Разбор причин отказа разгонного блока ДМ3 №5Л практически не повлиял на планируемый срок старта. В середине апреля пуск был предварительно намечен на 24 июня 1998 г. Однако из-за неготовности аппаратов в конце мая была названа новая дата запуска — 27 августа. Изменился и носитель — на серию 38602. Эту дату вскоре пришлось опять изменить. На сей раз из-за задержки запуска спутника Astra 2A, перенесенного на 25 августа. Некоторое время рассматривалась возможность запустить «Ураганы» раньше Astra 2A, однако проблемы с испытаниями спутников вновь отложили ГЛОНАССовский пуск.
В сентябре рассматривался вариант запуска «Ураганов» на разгонном блоке 14С43 «Бриз-М» при первом его полете. Однако это потребовало бы значительной доработки блока, изменения системы крепления на нем КА.
В сентябре-октябре из-за отсутствия средств у МО РФ на подготовку и запуск, старт «Ураганов» вообще «завис». Отчетливо стала вырисовываться перспектива его переноса на 1999 г. Однако в середине ноября из-за задержки с испытаниями КА «Глобус» у Минобороны появились деньги на подготовку к запуску «Ураганов», оплату работы представителей АКО «Полет» на космодроме. Подготовка к запуску трех КА «Ураган» началась 20 ноября 1998 г. Пуск намечался на 28 декабря вместо «Глобуса». Бывший «глобусовский» носитель серии 38502 был отдан для пуска «Ураганов».
Однако из-за несвоевременного перечисления денег за ракетное топливо предприятию-изготовителю старт вновь было решено отложить по крайней мере до 7 января 1999 г.
И тут в ситуацию с «Ураганами» вмешались силы высшие. Еще 4 ноября 1998 г. Президент Ельцин подписал поручение №1451 Евгению Примакову. В поручении говорилось:
«Глобальная навигационная спутниковая система — это национальное достояние России. Утрата этой системы может нанести серьезный ущерб национальной безопасности и международному престижу России.
Прошу в месячный срок представить план действия Правительства, направленный на безусловное сохранение и развитие Глобальной навигационной спутниковой системы.»
На основании этого поручения 7 декабря у заместителя председателя Правительства Владимира Булгака прошло совещание по системе ГЛОНАСС. После совещания в Минобороны срочно нашли 20 млн руб. из бюджета МО РФ на закупку топлива и командировочные расходы. Пуск «Ураганов» назначили на 30 декабря.
При подготовке публикации использованы следующие источники:
1. «Военно-космические силы», книга II, 1998 ISBN;
2. «Оружие России. Том VI: Ракетно-космическая техника», 1997. ISBN 5-7734-0002-2;
3. Глобальная спутниковая радионавигационная система ГЛОНАСС, 1998. ISBN 5-88070-004-6;
4. Сетевые спутниковые радионавигационные системы, 1993. ISBN 5-256-00174-4;
5. «Новости космонавтики» №5, 1994; №5, 1995; №20, 1997; №9, 1998;
6. Информационные бюллетени КНИЦ ГЛОНАСС (электронный вариант): hhtp://www.rssi.ru/SFCSIC.
Запуски КА в рамках создания и поддержания системы ГЛОНАСС
* — позиция с этим номером была смещена в декабре 1985 г. относительно начального положения. |
ü Тиг Крекел (Tig H. Krekel) избран президентом и главным управляющим компании Hughes Space and Communications Company, а также старшим вице-президентом головной фирмы Hughes Electronics Corporation. Об этом говорится в пресс-релизе Hughes за 7 января. 45-летний Крекел, по образованию инженер-механик и ядерный инженер, пришел из компании AlliedSignal, Inc., где с 1997 г. он был президентом и главным управляющим ее крупнейшего и самого прибыльного отделения самолетных систем AlliedSignal Aerospace Equipment Systems. Крекел заменил Доналда Кроумера (Donald Cromer), который ушел в отставку 1 декабря 1998 г. — С.Г. ü Компания Spectrolab Inc. объявила 11 января о создании солнечных элементов с тройным переходом (triple-junction solar cells) на арсениде галлия с коэффициентом полезного действия 26.8%. Новые элементы могут найти свое применение на космических аппаратах фирмы Hughes уже в конце 1999 г. Предыдущим достижением фирмы были солнечные элементы с двойным переходом с эффективностью 21.6%, дебютировавшие на КА PAS-5 в августе 1997 г. К 2002 г. Spectrolab Inc., являющаяся с 1975 г. подразделением Hughes Electronics Corporation, планирует выпустить солнечные элементы с эффективностью от 30 до 40%. - С.Г. |
США предупреждают — помощь Ирану опасна для коммерческих запусков
М.Тарасенко. «Новости космонавтики»
12 января администрация США объявила о введении санкций против трех российских организаций, подозреваемых ей в содействии ракетно-ядерным программам Ирана. Санкции означают, что данные предприятия не могут получать американскую помощь и им запрещено экспортировать товары в США и импортировать таковые из США.
В июле 1998 г. подобные санкции уже были введены против семи российских предприятий. На этот раз к ним прибавились Московский авиационный институт, Химико-технологический университет им.Менделеева и Научно-исследовательский и конструкторский институт энерготехники (НИКИЭТ). За исключением МАИ, вновь наказанные предприятия имеют мало общего с ракетно-космическими программами.
Буквально через сутки администрация США пригрозила, что, если Россия не прекратит содействие ракетной и ядерной программам Ирана, то запуски американских спутников на российских ракетах будут урезаны или вообще запрещены.
На первый взгляд это выглядит как реакция на волну возмущения со стороны российских властей, вызванную объявлением о санкциях: «Недовольны? А вот вам еще!». На самом же деле еще месяц назад, 16 декабря 1998 г., Государственный департамент США выступал с официальным предупреждением, что если российские предприятия не прекратят содействие ядерной программе Ирана, «это может помешать расширению доступа России на доходный рынок запусков американских коммерческих спутников». Так что по крайней мере на этот раз кнут был применен только после того, как помахивание пряником не возымело действия. Разговор о квотах — это именно пряник, а не второй кнут.
Наша справка США убеждены, что Иран использует ведущееся сейчас с помощью Минатома РФ строительство реактора в Бушире (Bushehr) как прикрытие для приобретения чувствительной российской ядерной технологии. Российская сторона настаивает, что ее участие в буширском проекте направлено только на создание мощностей по производству электричества и не дает Ирану технологий для создания оружия массового уничтожения. Американские разведслужбы утверждают, что российско-иранское сотрудничество не ограничивается строительством энергетического реактора. По их данным, представители по крайней мере двух основных российских ядерных исследовательских институтов без огласки ведут переговоры о продаже Ирану 40-мегаваттного исследовательского реактора на тяжелой воде и установки для преобразования урана. |
Спутниковая система ГЛОНАСС не имеет перспектив? Е.Девятьяров. «Новости космонавтики» 9 декабря. В настоящее время возникла реальная угроза полного выхода из строя основного средства навигационного обеспечения Вооруженных Сил России — глобальной навигационной спутниковой системы ГЛОНАСС. Технический ресурс всех спутников этой системы, находящихся сейчас на орбите, уже истек. Генеральный директор Российского космического агентства Юрий Коптев сообщил в Государственной Думе следующее: «Наша ситуация сегодня такова: развернув прекрасную систему, которая по своим характеристикам выше, чем американская, создав более 24 спутников, мы сегодня имеем 13 спутников в этой системе. И никакой перспективы нахождения ресурсов на то, чтобы эту систему удержать. Хотя без этой системы вообще невозможно говорить ни о высокоточном оружии, ни о вопросах действия где-то на необорудованных театрах действия, ни даже об элементарных вопросах судоходства, авиации и всего остального. Мы ориентируемся на то, что будем пользоваться только иностранными технологиями.» В связи с этим депутаты Госдумы утвердили 9 декабря 1998 г. Постановление «О мерах по обеспечению функционирования системы ГЛОНАСС». В этом документе депутаты рекомендуют Правительству разработать программу мер по обеспечению функционирования и развития орбитальной группировки и наземных технических средств спутниковой системы на 1999-2002 гг. Кроме того, Правительству рекомендовано включить в государственный оборонный заказ 1999 г. обеспечение соответствующего финансирования изготовления шести космических аппаратов со средствами их выведения на орбиту, а также обеспечить авансирование этих работ. Депутаты постановили предусматривать в оборудовании, применяющемся на территории России для навигационных определений, обязательное использование отечественной системы ГЛОНАСС. |
Дело в том, что ныне действующая квота на запуски спутников американского производства, принятая несколько лет назад и разрешающая России до 2000 г. запустить «15 крупных геостационарных спутников» и три партии спутников Iridium, уже полностью выбрана.
Относительная дешевизна и продемонстрированная надежность российских ракет стимулировали рост спроса на них со стороны американских производителей спутников. В 1997 г. из 48 спутников, выведенных на орбиты российскими ракетами, 18 были американскими (и еще два — сделанными в США). В начале 1998 г. в США уже поднимался вопрос об увеличении установленной квоты на запуски американских спутников на российских ракетах. Российская сторона уже давно настаивает на ее увеличении или полной отмене. В этой ситуации администрация США решила попытаться применить подвернувшийся рычаг для воздействия на позицию России по ядерному сотрудничеству с Ираном.
Пересмотр квоты должен состояться в конце этого года, и при этом, как пояснил пресс-секретарь Госдепа Дж.Рубин, «мы очень серьезно примем во внимание, насколько удастся убедить Россию прекратить поддержку иранской ракетной программы, оказываемую российскими лицами. ...Если мы не добьемся прогресса в вопросах [не]распространения ракет, мы не будем в состоянии поддержать увеличение этой квоты».
Трудно сказать, насколько эффективной окажется эта аргументация в российско-американском диалоге (и тем более во внутренней борьбе в российском правительстве), но с точки зрения НК, безусловно, лучше запускать побольше иностранных спутников на наших ракетах, чем помогать другим странам делать ядерные боеголовки для своих.
С.Карпенко. «Новости космонавтики»
3 января 1999 г. в 15:21:10.332 EST (20:21:10 UTC) со стартовой площадки SLC-17В Станции ВВС «Мыс Канаверал» состоялся успешный запуск РН Delta 2 (облегченная модель 7425) с американской АМС Mars Polar Lander (MPL). В качестве дополнительной нагрузки станция MPL несет два марсианских пенетратора, известных под названием Deep Space 2 (DS2).
Научная программа полета по существу состоит из двух независимых программ. Собственно станция Mars Polar Lander создана в рамках долгосрочной программы исследования Марса Mars Surveyor и предназначена для посадки и исследований на поверхности планеты. Экспериментальные пенетраторы Deep Space 2 разработаны в рамках программы New Millenium и будут использованы для поиска воды в грунте Марса.
Запуск и первые дни полета
Для запуска по программе MPL имелось несколько стартовых периодов: с 3 по 10 января (основной), с 11 по 16 января и с 17 по 27 января. Запуск в первый период обеспечивал прибытие КА к Марсу 3 декабря 1999 г. с посадкой между 73 и 77°ю.ш. В случае задержки запуска до конца января прибытие к Марсу состоялось бы не позднее 17 декабря 1999 г., а район посадки сместился бы примерно на 2° к северу. Длительность стартового окна каждые сутки составляла 30 секунд; 3 января оно открывалось в 15:21:10 EST.
Особенностью этой подготовки было то, что она пришлась на Рождество и Новый год. Рано утром 21 декабря станция была доставлена на стартовый комплекс SLC-17B и состыкована с носителем, а 21-22 декабря были успешно проведены полная функциональная проверка научной аппаратуры и основного и дублирующего комплектов служебных систем. После Рождества, 28 декабря, со станции убрали все съемные элементы. 29 декабря MPL был закрыт головным обтекателем, 30 декабря заправили вторую ступень носителя, зарядили бортовые аккумуляторы MPL и загрузили на станцию последние данные, 31 декабря провели имитацию старта. Вечером 2 января было включено питание MPL и проведена его заключительная проверка.
Запуск MPL состоялся точно в назначенный срок, в 15:22:10 EST. Стартовые ускорители отработали 66 сек, первая ступень — 4 мин 24 сек. В результате первого включения двигателя 2-й ступени на 6 мин 44 сек была достигнута опорная орбита с наклонением 28.35° и высотой 157.3x245.2 км. Второе, кратковременное включение 2-й ступени было выполнено после 23-минутной баллистической паузы. Твердотопливный двигатель Star 48B 3-й ступени был включен в 15:57 EST и проработал 88 сек, а в 16:03 станция была отделена от ступени.
Первую телеметрию с КА приняла в 16:19 EST 34-метровая антенна сети Дальней космической связи (DSN) в Канберре (Австралия). К этому моменту были раскрыты и ориентированы на Солнце две панели солнечных батарей перелетной ступени. Тут-то и начались проблемы. Сразу после отделения от третьей ступени бортовая система управления занялась определением текущей ориентации и построением ориентации, удобной для связи с Землей (угол между осью рупорной антенны MGA и направлением на Землю должен составлять 40°). Однако несколько попыток аппарата определить ориентацию с помощью основной и запасной звездных камер были безуспешны.
Только к 22:20 PST (4 января в 06:20 UTC) управленцы смогли развернуть КА. Связь с Землей была стабильной, но на пониженном уровне сигнала. Анализ телеметрии показал, что все системы КА в порядке. Только звездные камеры «не хотели» найти в небе ни одного из заложенных в память набора опорных звезд. Чтобы разобраться с ними, нужно было снять с КА больше данных.
4 января в 14:00 PST был проведен эксперимент: КА временно развернули на 45° в сторону Земли, убедились, что мощность сигнала при этом значительно выше, а условия по освещенности и тепловому режиму не нарушаются, а затем вернули в прежнее положение. Все изображения со звездной камеры, полученные до установления связи 3 января, и связанную с ней телеметрию сбросили на Землю для анализа.
5 января в 09:40 PST КА вновь перевели в «опытную» ориентацию. Далее началась работа по трем направлениям. Первое — уточнение параметров бортового ПО защиты от сбоев с учетом текущего состояния КА. Второе — генерация командных последовательностей для новых разворотов КА, необходимых для уточнения его ориентации и улучшения условий связи с ним. Третье — определение причин нештатной работы звездных камер. Предварительный анализ показал, что в объективы попадает отраженный от поверхностей КА свет. Видимо, предусмотренные для фильтрации «шальных» световых лучей отражатели не выполняли свои функции как надо. В этом случае имело смысл экспериментально поискать такую ориентацию КА, чтобы затенить поверхности КА, отражающие свет в поле зрения датчиков.
6 января в 03:00 PST на борт загрузили обновленное ПО защиты от сбоев, однако после этого КА неожиданно начал автоматическое выполнение цикла начальной ориентации. На этот раз, однако, звездная камера обнаружила опорные звезды! Аппарат автоматически (как должно было случиться еще 3 января) выполнил требуемый разворот — звезды по-прежнему определялись. Дефект самоустранился, и специалистам группы управления ничего не оставалось сделать, как начать проверку всех бортовых систем КА по графику первого дня. Параллельно были установлены причины неожиданного запуска цикла начальной ориентации. Группа управления выяснила также причины двух сбоев в работе автопилота, имевших место 5 и 6 января.

К 7 января стало окончательно ясно, что причина неверной работы звездного датчика – в отраженном от поверхностей КА свете. Аппарат перевели в режим ориентации, при котором возможные источники отраженного света упрятаны в тень. В тот же день на посадочном аппарате не прошло автоматическое отключение цепи нагревателя – пришлось выключить ее командой с Земли.
8 и 9 января была закончена закладка на борт уточненных параметров системы защиты и разрешена ее работа в полном объеме. 11 января планируется заложить поправки, связанные с алгоритмом переключения бортового ПО между различными задачами.
Программа MPL
Главными целями программы MPL являются:
– посадка в заданный район марсианской поверхности;
– выполнение съемки местности при спуске в атмосфере Марса;
– панорамная стереофотосъемка места посадки;
– определение содержания льда в грунте на месте посадки;
– цикл метеорологических наблюдений за атмосферой Марса.
По полученным в результате работы MPL данным ученые хотят провести:
– детальное изучение климата полярных областей Марса;
– определение содержания водяного пара в атмосфере Марса;
– поиск льда в марсианском грунте и оценку его количества.
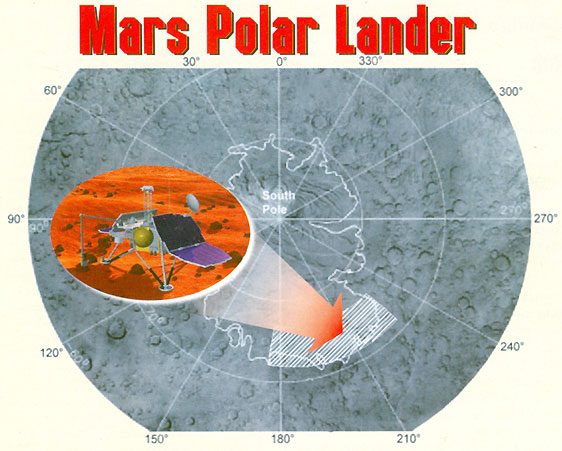
Местом посадки КА выбрана граница южной марсианской полярной шапки (см. фото в начале статьи), между 74 и 77°ю.ш. и 170 и 230°з.д. (Пикантная деталь: на редакционном глобусе Марса именно в этом месте стоит надпись «ГАИШ МГУ».) Во время работ КА там будет царить лето и полярный день. Выбор места был сделан по снимкам южной полярной шапки Марса, выполненным АМС Mars Global Surveyor в декабре 1997 г. Однако они были сделаны с расстояния около 4000 км с разрешением, недостаточным для детальной оценки области посадки. Дополнительная съемка поверхности для уточнения места посадки будет проведена камерой MGS с рабочей орбиты высотой 300 км в июне 1999 г. На имеющихся изображениях видно, что в районе возможного места посадки белые участки – области, покрытые снегом и льдом, – чередуются с темными, возможно, оголенными участками грунта. Ученые хотят выбрать место посадки так, чтобы посадочный аппарат (лэндер) попал недалеко от кромки льда, но на коренную породу.
Расчетное время работы MPL на поверхности планеты – 90 дней. Существует план действий в случае, если КА проработает на поверхности больше расчетного срока. Круг выполняемых задач останется при этом прежним.
Конструкция АМС
На этапе перелета от Земли к Марсу посадочный аппарат MPL закрыт лобовым экраном и хвостовым обтекателем и имеет вместе с ними диаметр 2.4 м. Перелетная ступень КА, обеспечивающая доставку лэндера к Марсу, пристыкована к заднему торцу хвостового обтекателя.
Перелетная ступень (см. рисунок) оснащена двигательной системой для коррекций траектории. На ней расположены две двухсекционные панели СБ, обеспечивающие энергией КА во время перелета, и радиосистема для связи с Землей, использующая рупорную антенну среднего усиления Х-диапазона (MGA) и всенаправленную антенну низкого усиления (LGA). Посадочный аппарат и ступень вместе с прикрепленными к ней пенетраторами разделяются за 10 мин до посадки. После торможения в атмосфере Марса, на высоте 7.5 км отстреливается головной обтекатель и вводится парашют из полиэфира диаметром 8.4 метра.
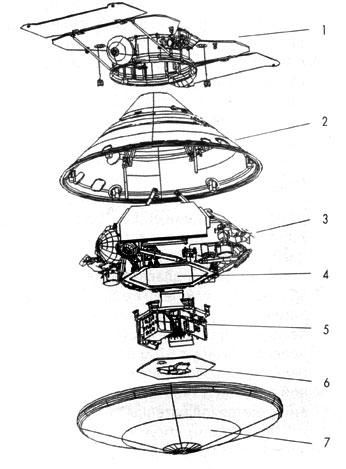 1 — перелетная ступень; 2 — хвостовой обтекатель; 3 — посадочный аппарат; 4 — теплоизолированный объем ПА; 5 — оборудование ПА; 6 — крышка теплоизолированного объема; 7 — лобовой экран |
Сухая масса лэндера — 512 кг, а вместе с заправленным топливом (гидразин) — 576 кг. Посадочный аппарат оснащен четырьмя блоками ДУ ориентации и стабилизации, каждый из которых содержит ЖРД большой (5 фунтов = 22 Н = 2.3 кгс) и малой (1 фунт = 4.4 Н = 0.45 кгс) тяги. На донной части КА расположены три группы посадочных двигателей по четыре ЖРД тягой по 60 фунтов (266 Н, 27.1 кгс) в каждой. Топливо для всех двигателей поступает из двух топливных баков, расположенных под основными СБ лэндера.
При работе на поверхности посадочный аппарат имеет высоту 1.06 м и поперечный размер (с развернутыми СБ) 3.6 м.
Несущий корпус КА (шасси) выполнен на основе сотовой алюминиевой конструкции, скрепленной графито-эпоксидными панелями. Посадочные опоры выполнены из алюминия и находятся в сложенном состоянии. Их раскрытие при посадке осуществляется с помощью пружин. Сотовые амортизаторы посадочных опор обеспечивают поглощение удара при посадке.
Внутри шасси располагаются основной и резервный комплект бортовой ЭВМ, блок распределения мощности, 12-элементная никель-водородная аккумуляторная батарея с блоком контроля заряда, основная и резервная радиосистема. Отдельно установлены блок гироскопов, электроника пиротехнических устройств для развертывания приборов и радиолокационный высотомер, который будет использован только во время спуска в марсианской атмосфере.
Энергопитание посадочного аппарата суммарной мощностью 200 Вт осуществляется от шести секций СБ. Две основные двухсекционные батареи раскроются после посадки. Две дополнительные панельки раскрыты еще при изготовлении. При недостаточном освещении питание будет осуществляться от аккумулятора емкостью 16 А-ч. Он предназначен главным образом для подогрева центрального блока электроники до -30°С ночью (при -80°С снаружи). С течением времени и наступлением осени в районе посадки батарея постепенно потеряет способность поддерживать заданную температуру, и аппарат замерзнет.
MPL оборудован двумя радиосистемами:
1. УВЧ-радиосистема предназначена для двусторонней связи с Землей через КА Mars Climate Orbiter (MCO), который ко времени прибытия MPL к Марсу будет находиться на орбите искусственного спутника планеты. MPL может передавать данные и через другой орбитальный аппарат — MGS, но получение команд с Земли через MGS невозможно. В УВЧ-систему входят всенаправленная антенна низкого усиления и приемопередатчик. Скорость передачи данных составляет 128 кбайт/сек. Число сеансов связи с КА составит от трех до четырех в день, со средней продолжительностью несколько минут. (Связь возможна только в том случае, если угол места спутника над горизонтом относительно MPL больше 20°). Сеанс связи будет разделен на две части — приема команд и посылки данных на Землю.
Телеметрия с КА MPL будет обрабатываться разработчиками MPL из Lockheed Martin Astronautics (Денвер, шт. Колорадо) и специалистами JPL (Пасадена, Калифорния).
2. Система Х-диапазона для прямой связи с Землей. В систему входят направленная антенна среднего усиления (MGA) и приемопередатчик. Система обеспечивает скорость передачи данных 5700 бит/с с использованием 70-метровой приемной антенны наземной сети DSN и 1400 бит/с — с использованием 34-метровой антенны.
 Mars Polar Lander состыкован с третьей ступенью |
Обе системы могут использоваться совместно, когда MPL передает научные данные через ретранслятор и одновременно принимает инструкции с Земли напрямую по каналу X-диапазона.
Научная аппаратура MPL
В состав научной аппаратуры MPL входят комплект приборов для изучения летучих веществ и климата Марса MVACS (Mars Volatiles and Climate Surveyor), десантная камера и лидар.
В состав комплекта MVACS входят:
1. Манипулятор. На верхней (приборной) крышке лэндера установлен манипулятор, длина которого в развернутом положении составляет 2 метра. На конце рабочего звена манипулятора установлены камера RAC, ковш для забора грунта и температурный датчик. Ковш будет брать грунт и помещать его в газоанализатор TEGA. Камера RAC (Robotic Arm Camera) позволит сделать при освещении красным, синим или зеленым светом фотографии высокого разрешения, показывающие структуру материала поверхности и приповерхностного слоя. Температурный датчик будет измерять температуру и теплопроводность грунта.
2. Стереокамера SSI (Surface Stereo Imager). Камера, идентичная установленной на станции Mars Pathfinder, находится на 1.5-метровой мачте, которая выдвигается с верхней крышки лэндера после посадки. Основные ее функции:
– панорамная съемка окрестностей места посадки;
– вспомогательные съемки для организации работы с манипулятором;
– съемка магнитов, установленных на лэндере для определения на поверхности магнитных материалов;
– съемка Солнца для изучения концентрации аэрозолей и водяного пара в атмосфере Марса.
Оптическая система с двумя объективами и общим ПЗС-детектором позволит делать стереоизображения. Сменяемые фильтры позволяют делать фотографии в разных спектральных диапазонах – от фиолетового до ближнего инфракрасного (400–1100 нм).
3. Метеокомплекс. Метеорологические датчики расположены на двух мачтах. На первой мачте высотой 1.2 м на верхней крышке КА находятся датчик направления и скорости ветра, датчик температуры и полупроводниковые лазеры, измеряющие влажность воздуха, содержание изотопов воды и углекислого газа. Вторая мачта длиной 0.9 м направлена вниз и предназначена для изучения атмосферных эффектов на высоте от 10 до 15 см над марсианской поверхностью. На ней находятся ветровой датчик и два датчика температуры. Полученные данные позволят определить пороговую скорость ветра, необходимую для начала пылевой бури.
ü 17 декабря 1998 г. JPL объявила, что в середине ноября Уилльям О'Нейл (William J. O'Neil) был назначен менеджером американского проекта доставки марсианского грунта. О'Нейл работает в JPL с 1963 г., до недавнего времени был менеджером проекта Galileo, затем — главным технологом программы исследования Марса. Летом 1998 г. он руководил пересмотром плана программы Mars Surveyor, и в частности двух первых пусков с целью доставки грунта, которые состоятся в 2003 и 2005 гг. Теперь О'Нейл будет руководить их осуществлением. - И.Л. |
4. Газоанализатор TEGA (Thermal and Evolved Gas Analyzer) расположен на приборной крышке лэндера. С помощью манипулятора в приемник анализатора помещают образец грунта массой 0.1 г. Далее приемник закрывается крышкой, образуя миниатюрную печку. Образец постепенно нагревают с помощью спирального нагревателя до температуры 1027°С (ограничение вызвано энергетическими возможностями СБ), и выделяющийся газ просвечивается полупроводниковым лазером, свет которого падает на фотоприемник. По интенсивности поглощения света можно количественно определить газовый состав, и прежде всего – наличие водяного пара и углекислого газа. Их присутствие будет свидетельствовать о наличии льда или сухой углекислоты в составе грунта. Всего в составе прибора восемь анализаторов, каждый из которых состоит из двух печек. В одну загружается грунт, вторая оставляется пустой. Разность теплового потока из одной печки и из другой говорит о количестве поглощенного образцом тепла.
Десантная камера предназначена для выполнения примерно 10 черно-белых снимков поверхности Марса во время спуска КА в атмосфере. Съемка начнется на высоте 8 км, когда от MPL отстреливается хвостовой обтекатель. Первые снимки должны показать участок поверхности площадью порядка 9 км2 с разрешением 7.5 м/пиксел; последние покажут участок поверхности площадью 9 м2 с разрешением 9 мм/пиксел.
Камера использует ПЗС-матрицу с разрешением 1000x1000 пикселов.
Лидар (LIDAR – Light Detection and Ranging Instrument) предназначен для определения содержания влаги и пыли в марсианской атмосфере до высоты 2–3 км. Полупроводниковый лазер (на арсениде галлия-алюминия) излучает в ближнем ИК-диапазоне 2500 импульсов в секунду. Излученный импульс частично поглощается, частично рассеивается и отражается от частичек атмосферной влаги и пыли. Чувствительный приемник измеряет временную задержку между излученным и принятым импульсами. По времени задержки ученые смогут определить наличие в атмосфере влаги и пыли. Лидар расположен на приборной панели MPL и способен излучать импульсы только строго вертикально. Прибор разработан в ИКИ РАН под руководством д-ра В.М.Линкина при финансовом участии РКА. Это первый российский эксперимент на борту американской АМС.
Впервые на Марс будет доставлен микрофон, который выполнит запись шума ветра и шум работающих механизмов лэндера. Этот эксперимент предложен и осуществлен Планетарным обществом США с использованием общедоступных компонентов. Микрофон помещен в блок электроники лидара. Его габариты – 5x5x1 см, масса – 50 г, потребляемая мощность – 100 мВт. С учетом загруженности канала связи MPL с Землей на передачу 10-секундной записи может потребоваться целая неделя.
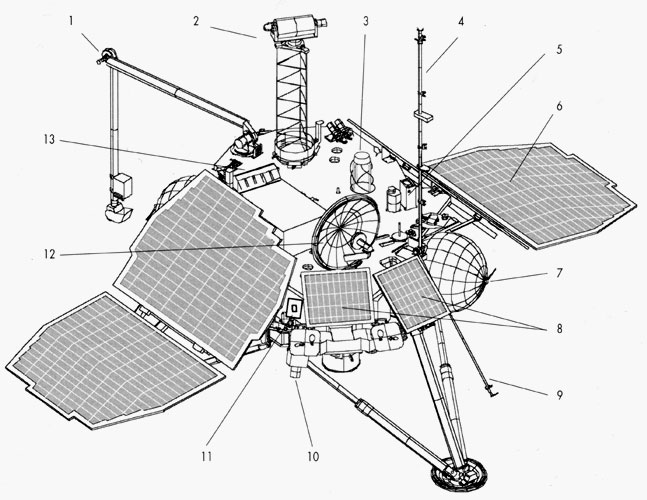 1 — манипулятор; 2 — стереокамера SSI; 3 — УВЧ-антенна; 4 — верхняя мачта метеокомплекса; 5 — лидар; 6 — панели солнечных батарей; 7 — топливный бак (2 шт.); 8 — дополнительные солнечные батареи; 9 — нижняя мачта метеокомплекса; 10 — десантная камера MDI; 11 — антенна низкого усиления; 12 — антенна среднего усиления; 13 — газоанализатор TEGA |
Микрофон записывает только наиболее громкие звуки, происшедшие в течение каждого 10-секундного цикла работы. К концу работы MPL длительность цикла работы микрофона, возможно, увеличится.
Перелет к Марсу
Перелет по трассе Земля-Марс продлится 11 месяцев и будет очень похож на полет станции MCO. Четыре основные коррекции намечены на 18 января, 17 февраля, 4 октября и 23 ноября. Калибровка и проверка научных приборов будет проведена дважды: 12–19 февраля и 4–11 сентября (ориентировочно).
В течение всего полета станция будет связываться с Землей с использованием передатчика X-диапазона и антенны MGA на перелетной ступени. Большую часть времени средства DSN будут задействоваться на 4 часа в сутки, в активные периоды – по 10–12 часов.
Программа Deep Space 2
Два марсианских пенетратора, созданных по проекту DS2, стали дополнительной нагрузкой для АМС MPL. Подобно остальным аппаратам серии Deep Space, создаваемым по программе New Millenium, DS2 имеет целью отработку технологий, которые могут быть использованы в будущем. Получение научных данных не является основной задачей проекта.
Использовать пенетраторы, сбрасываемые с «родительского» КА, предполагается для исследования тел Солнечной системы. Сеть таких малых КА на поверхности планеты можно использовать для глобальных наблюдений за погодой или сейсмической обстановкой. Основные требования к пенетратору заключаются в следующем:
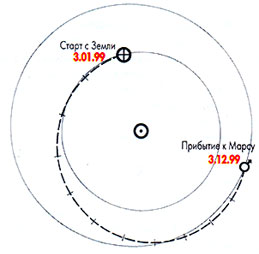 Схема перелета АМС Mars Polar Lander |
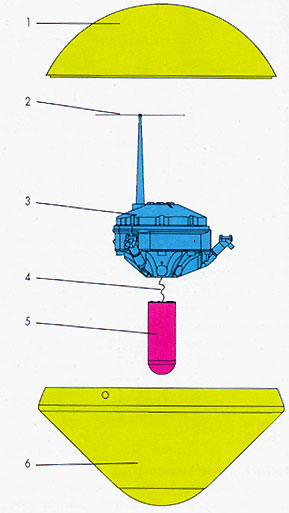 Схема аппарата DS-2 1, 6 — аэродинамический обтекатель; 2 — антенна; 3 — хвостовая часть; 4 — гибкий кабель; 5 — зонд |
– простая система входа и спуска в атмосфере;
– способность выдержать высокие ударные нагрузки при столкновении с поверхностью;
– малые габариты и масса;
– способность функционировать на поверхности и в приповерхностном слое грунта планеты при низких температурах (-60°...-120°С); Микропенетраторы DS2 созданы с учетом этих требований и имеют массу всего по 2.5 кг. Это первые пенетраторы, разработанные в NASA.
На DS2 отрабатываются следующие новые технологии:
1. Способ прохождения атмосферы. До входа в атмосферу пенетратор находится в обтекателе размером с баскетбольный мяч, формой напоминающем желудь. Спуск в атмосфере чисто баллистический. Устойчивость обеспечена за счет смещения центра масс вперед по вектору скорости относительно центра давления.
Обтекатель выполнен на основе перспективного абляционного материала SIRCA-SPLIT, разработанного в Исследовательском центре имени Эймса. Температура внутри кокона почти не меняется, оставаясь равной 40°С, в то время как его наружная поверхность нагревается до 2000°С. Обтекатель не отделяется, а лопается при столкновении с поверхностью.
2. Способ посадки. В системе не предусмотрено ни парашютов, ни тормозных ДУ для какого-то снижения посадочной скорости аппарата – она полностью гасится при столкновении с поверхностью. Внешний вид пенетратора определяется в первую очередь условиями этого столкновения и действующими на него при этом перегрузками. Пенетратор DS2 состоит из двух компонентов – хвостовой части (после столкновения остается на поверхности) и зонда, который при столкновении заглубляется в толщу грунта (в расчетном случае) на глубину около метра. Вся научная аппаратура находится на зонде; аккумуляторы и аппаратура связи расположены на хвостовой части. Для обмена данными между «хвостом» и «головой» используется гибкий шлейф.
Головная часть цилиндрического зонда имеет полусферическую форму, из-за чего зонд напоминает пулю. Такая форма является наиболее подходящей в случае, когда точно не известна твердость грунта. «Хвост» сделан широким, чтобы при ударе не слишком углубиться.
При такой схеме и скорости пенетратора в момент удара 200 м/с перегрузка, действующая на зонд при столкновении, достигает 30000g; на кормовую часть – 60000g.
3. Жесткая конструкция. Даже если корпус пенератора выдержит удар, большой проблемой является сохранение в целости бортовой электроники. Для этого корпуса и функциональные блоки выполнены с максимальной жесткостью, чтобы встретить удар как одно целое. Конструктивно блок электроники представляет собой призму; научные приборы собраны в жесткий блок. Материалы специально подобраны для обеспечения максимальной жесткости конструкции. Микросхемы встроены в платы; вместо обычных соединительных проводов для соединений широко использованы гибкие шлейфы. Блоки расположены так, чтобы равномерно распределить нагрузку между собой.
|
4 . Гибкие электросоединения. Электрические шлейфы состоят из перемежающихся слоев каптона и медных проводников. Они легче, компактнее и гибче обычных проводов. Шлейфы используются для соединения между блоками электроники и между зондом и хвостом.
5. Микроконтроллер. Бортовая ЭВМ строится на микропроцессоре (МП) 80C51, выполненном на базе коммерческой модели. Он представляет собой 8-разрядный чип, адресующий 128 кбайт оперативной памяти, 128 кбайт памяти ПЗУ и 32 аналогово-цифровых и цифро-аналоговых преобразователей. Потребляемая мощность при частоте 10 МГц — 6 мВт, в режиме ожидания — 0.5 мВт. Занимаемый объем — 2.2 см3, масса — 3.2 г.
Разработка, запуск, управление полетом и анализ научных данных двух марсианских станций 1998–1999 гг., Mars Climate Orbiter и Mars Polar Lander, обошлись NASA в 357 млн $. Стоимость проекта DS2 составляет всего 2.8 млн $.
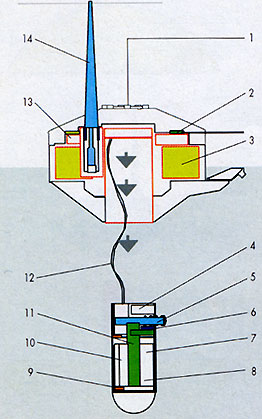 Схема посадочного аппарата DS-2 1 – солнечный датчик; 2 – приемопередатчик; 3 – аккумуляторы; 4 – ударный акселерометр; 5 – заборник грунта; 6 – анализатор пара; 7 – электроника научной аппаратуры; 8 – микроконтроллер; 9 – температурные датчики; 10 – силовая электроника; 11 – привод бура; 12 – гибкий кабель; 13 – десантный акселерометр; 14 – антенна |
6. Микросистема связи. Связь пенетратора с Землей будет осуществляться через АМС Mars Global Surveyor (MGS). УВЧ-приемопередатчик пенетратора весит менее 50 г. Скорость передачи данных – 7000 бит/с. Потребляемая мощность – 500 мВт в режиме приема, 2 Вт в режиме передачи.
7. Сверхнизкотемпературная аккумуляторная батарея. Неперезаряжаемая литиево-тионил-хлоридная батарея обеспечивает мощность 600 мА·ч при температуре 80°С. Каждый пенетратор оснащен двумя батареями, состоящими из четырех элементов массой по 40 г каждый. В элементах батареи используется тетрахлорогаллат лития вместо обычно используемого хлорида алюминия-лития. Напряжение на выходе батареи – от 6 до 14 В, срок службы – до 3 лет.
8. Микроэлектроника управления мощностью. Микроэлектронный блок распределения энергии использует контур управления, выполненный на базе специализированных микросхем, объединяющих аналоговые и цифровые компоненты. Масса блока – менее 5 г, занимаемый объем – 5.6 см3, потребляемая мощность – 0.05 мВт.
9. Эксперимент по анализу грунта и поиску воды. На пенетраторе имеется маленький электропривод, вращающий бур. Бур должен слегка поскрести грунт, и образец грунта (около 100 мг) сам засыпается в крошечную печку. Печка нагревается «открытым огнем» пиропатрона. Затем с помощью лазерного полупроводникового анализатора производится поиск паров воды.
Максимальная потребляемая прибором мощность – 1.5 Вт. Объем, занимаемый аппаратурой анализатора, – 11 см3, масса менее 50 г. Управляющая электроника занимает 4.8 см3, масса 10 г, лазер – 0.3 см3 и 1 г.
10. Эксперимент по определению теплопроводности грунта. Используются два платиновых резисторных термодатчика, расположенных на диаметрально противоположных сторонах зонда. Датчики измеряют скорость рассеивания тепла в грунте после внедрения зонда.
11. Технология испытаний. «Маломасштабность» и относительная простота DS2 значительно сокращают число требуемых испытаний аппарата и сильно удешевляют стоимость проекта. Тем не менее испытания начались еще весной 1995 г., за несколько месяцев до его официального утверждения. Испытания системы входа проводились в несколько фаз. Сначала имитаторы сбрасывались с самолетов и вертолетов с высоты 3 км. Для изготовления аэродинамических обтекателей массой менее 1.2 кг был выбран карбид кремния. Затем испытания обтекателя и модели пенетратора при наихудших условиях удара проводились с использованием пневматической пушки Сандийской национальной лаборатории в Сокорро (Нью-Мексико). Они продолжались два года и были завершены в сентябре 1998 г. На авиабазе Эглин во Флориде с помощью другой пневматической пушки проводилась проверка разрушения обтекателя при столкновении с поверхностью. Испытания аэродинамических свойств обтекателя проводились на баллистическом полигоне Лаборатории Райта на базе Эглин, а затем в сверхзвуковой аэродинамической трубе ЦНИИМаш в Калининграде (Россия), способной имитировать марсианское атмосферное давление. Теплозащита испытывалась в Исследовательском центре имени Эймса NASA.
Пенетраторы «путешествуют» на перелетной ступени MPL как пассажиры и не имеют электрической связи с MPL. В течение перелета все их системы обесточены, и лишь при отделении пенетратора от перелетной ступени питание с его батареи подается на бортовой процессор. Спуск в атмосфере длится 3–3.5 мин, а точка падения будет лежать где-то в 100 км от места посадки MPL. Данные десантного и ударного акселерометров помогут оценить плотность атмосферы и твердость грунта.
Минимальное время работы каждого пенетратора на поверхности – 30 сек. В течение следующих 6 часов будет собран минимум данных по составу грунта, теплопроводности и содержанию воды в нем. Завершением основной программы экспериментов можно считать получение на Земле данных по работе систем пенетраторов на поверхности Марса. Это должно произойти в течение 2–36 часов после посадки. После этого дальнейшая работа на поверхности зависит от степени разрядки батарей и может продолжаться несколько суток.
По сообщениям JPL, группы управления КА, Университета Аризоны
СПУТНИКОВАЯ СВЯЗЬ |
ü Космическое командование ВВС США объявило 2 декабря об успешном проведении в «Космической боевой лаборатории» (Space Battlelab) эксперимента по «оптическому дополнению» Системы космического наблюдения (SOA — Space Surveillance Network Optical Augmentation). Речь идет о возможности использования для слежения за спутниками на высоких орбитах сети дешевых автоматических установок с коммерческими 40-сантиметровыми телескопами. Они могут частично заменить четыре основных станции оптического наблюдения Космического командования с их многочисленным персоналом в то время, когда те не могут вести наблюдения из-за плохой погоды или во время техобслуживания. Такой подход обещает ВВС США экономию в сумме не менее 1 млн $, и штаб Космического командования ВВС рассматривает возможность финансирования системы SOA. А в «боевой лаборатории» сейчас отрабатываются еще 12 проектов. - С.Г. ü 7 декабря 1998 г. компания TRW Inc. ввела в строй новый цех по производству солнечных батарей и электрооборудования космических аппаратов. Цех площадью около 9000 м2 с установленным в нем современным оборудованием позволит производить ежегодно солнечные батареи для 25 типичных геостационарных спутников, причем смена задания будет происходить в течение половины суток вместо недели. В ближайшие месяцы TRW введет в строй дополнительную производственную линию по выпуску элементов из аморфного кремния. Компания сообщает, что в течение 40 лет солнечные батареи фирмы обеспечили безаварийную работу 190 военных и коммерческих КА в общей сложности в течение 600 лет. - С.Г. ü 12 января компания TRW Inc. объявила о заключенном в начале месяца партнерском соглашении с фирмой Ball Aerospace & Technologies Corp., предусматривающем совместные работы по проекту Космического телескопа нового поколения NGST. Этот телескоп, запуск которого планируется на 2007 г., должен заменить собой Космический телескоп имени Хаббла. До настоящего времени TRW и Ball раздельно вели исследования по архитектуре проекта NGST по заданию Центра космических полетов имени Годдарда. Теперь они будут бороться за исследовательский контракт этапа Phase A в связке, в которой TRW будет играть роль головного подрядчика и заниматься проектом в целом и развертываемой механической конструкцией телескопа, а Ball Aerospace & Technologies Corp. — основного субподрядчика с особым упором на оптические элементы и научные задачи проекта. NASA планирует опубликовать запрос на подачу предложений по фазе A в 1-м квартале 1999 г. — С.Г. |

М.Тарасенко. «Новости космонавтики»
В конце декабря 1998 г. АО «Вымпелком», один из крупнейших российских операторов сотовой связи, вместе с ГП «Морсвязьспутник» подписали соглашение с международным консорциумом ICO Global об учреждении совместного предприятия ICO-R, которому передаются исключительные права на оказание услуг будущей глобальной системы спутниковой связи ICO на территории России.
Согласно подписанным учредительным документам, уставный капитал ICO-R составил 30 тыс $. Распределение акций между участниками показано в таблице.
ICO Global оставило за собой треть голосующих акций и весь пакет привилегированных акций (неголосующих, но обеспечивающих первоочередное получение дивидендов).
| Участник/Доля | Голосующих акций | Привилегиро- ванных акций | Всех акций |
| Вымпелком Морсвязьспутник ICO Communications Partners |
50% 15% 35% |
0% 0% 100% |
39% 12% 49% |
Для «Морсвязьспутника», являющегося российским оператором международной системы мобильной связи Inmarsat, присоединение к проекту ICO, вышедшему из недр Inmarsat, совершенно естественно. Для «Вымпелкома» же стремление занять роль ведущего дистрибьютора этой системы в России несколько неожиданно, если учесть, что он уже имеет договор о продаже телефонов и роуминге с консорциумом Iriduim и, как сообщается, готовит такое же соглашение с Globalstar. Более активное вовлечение в проект ICO может свидетельствовать о том, что именно эту систему мобильной спутниковой связи «Вымпелком» считает наиболее перспективной в коммерческом плане.
По нынешним планам, первый из 12 спутников системы ICO должен быть выведен на орбиту в марте 1999 г., а коммерческую эксплуатацию планируется начать уже в сентябре 2000 г. Прогнозируется, что начальный базовый тариф составит 1.95 $/мин с перспективой последующего снижения. Предполагается, что к 2010 г. в России может насчитываться от 350 до 520 тыс пользователей системы ICO.
По материалам «Известий»

|
Демонстрация системы GBS
М.Тарасенко. «Новости космонавтики»
В начале декабря компания Hughes Space and Communications завершила орбитальное тестирование спутника связи ВМФ США UHF Follow-On F9, выведенного на орбиту 20 октября. 22 декабря Huges, отвечающий за работы с КА до его сдачи заказчику, начал перегонять его из точки над Тихим океаном, где проводилось тестирование, в его рабочую точку над Атлантическим океаном. UHF Follow-On F9 планируется сдать в эксплуатацию в середине января.
Перед этим 20 декабря Hughes и ВМФ провели демонстрационные испытания «Службы глобального вещания» – канала передачи видеоинформации, установленного на последних спутниках связи ВМФ серии UHF Follow-On.
Система GBS выполнена на основе технологии коммерческого непосредственного телевещания и предназначена для высококачественной передачи широкополосных сигналов для пользователей во всех видах войск. Комплекс GBS включает четыре ретранслятора мощностью по 130 Вт, работающих в частотном диапазоне Ka (30/20 ГГц) и обеспечивающих пропускную способность 24 Мбит/с каждый, причем информация может приниматься небольшими мобильными терминалами в тактическом звене войск. Система будет служить для передачи разведывательной видеоинформации, карт, геодезических, метеорологических и других данных.
АВТОМАТИЧЕСКИЕ МЕЖПЛАНЕТНЫЕ СТАНЦИИ |

С.Карпенко, И.Лисов.
«Новости космонавтики»
Наша справка. Американская АМС NEAR (Near Earth Asteroid Rendezvous) была разработана в Лаборатории прикладной физики (APL) Университета Джона Гопкинса и запущена 17 февраля 1996 г. с целью изучения астероида 433 Эрос. Выход на орбиту вокруг астероида должен был состояться 10 января 1999 г. NEAR — первый КА, разработанный по заказу NASA в рамках программы малых АМС Discovery. Стоимость его разработки — 129 млн $, а вместе с запуском и управлением — 211.5 млн $. Предыдущее сообщение о ходе полета — НК №17/18, 1998. |
КА NEAR был выведен на орбиту, обеспечивающую сближение с Эросом, в ходе пролета Земли 23 января 1998 г. Последующие коррекции 1 апреля (TCM-12) и 14 октября (TCM-15) вывели станцию в область точки встречи.
Маневр TCM-15 относился к категории «замысловатых» (fancy burn); для его выполнения нужно было заложить новую программу бортового компьютера. 11 сентября управление станцией было передано от первого бортового компьютера FC-1 ко второму, а 14 сентября в FC-1 загрузили новое ПО версии 1.11. Пробная загрузка FC-1 прошла нормально, но 21 сентября при попытке вернуть ему управление из-за сбоев на станциях DSS-54 и DSS-15 Сети дальней связи DSN аппарат в течение 6 часов не получал команд и перешел в защитный режим. При этом были отключены магнитометр MAG и рентгеновский и гамма-спектрометр XGRS. (Высоковольтная часть XGRS была включена 24–26 августа.)
Поздно вечером 22 сентября аппарат был возвращен в штатный режим, а 23 сентября удалось переключиться на 1-й компьютер. Коррекция TCM-15 была успешно выполнена 14 октября в 11:59 EST. Двигатели -xB и +zA работали 43.16 сек и дали приращение скорости 0.363 м/с.
Долог путь к Эросу...
Приборы MAG и XGRS были включены в период с 25 сентября по 2 октября, а камера MSI и спектрометр NIS – в первых числах ноября. 5 ноября с расстояния 4 млн км с помощью MSI в течение 5.3 час была проведена первая съемка Эроса для получения кривой блеска. На снимках, принятых 9 ноября, астероид размером 40.2x14.5x14.2 км все еще выглядел как точка.
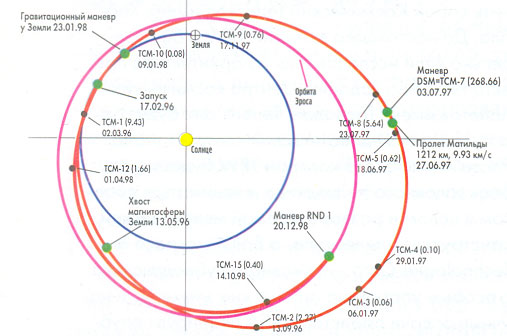 Траектория полета и маневры АМС NEAR c 17.02.96 по 20.12.98. Числа в скобках – величины импульсов, м/с |
4 декабря в 05:19 аппарат вновь «свалился» в защитный режим из-за отказа бортовой задачи идентификации звезд и был «возвращен» из него в 17:42. Из-за этого первая специальная навигационная съемка Эроса была отложена; вместо нее 7 декабря были вновь включены научные приборы. Навигационные съемки проводились ежедневно, начиная с 14 декабря.
7 декабря было введено круглосуточное слежение за станцией средствами DSN, а 14 декабря – и круглосуточное управление.
Как все должно было быть
К точке встречи NEAR подходил с меньшей орбитальной скоростью, чем Эрос. Станция должна была уравнять скорости за счет нескольких коррекций траектории. Почему не одним импульсом? Во-первых, орбита Эроса известна со значительной погрешностью и должна многократно уточняться по данным навигационной съемки астероида камерой MSI станции. Ни оптимальный момент импульса, ни его величину без этого не рассчитаешь. Во-вторых, существуют естественные погрешности исполнения маневра, и разгон в несколько этапов позволяет их скомпенсировать.
Первый и самый значительный разгонный импульс RND1 основная двухкомпонентная ДУ АМС NEAR должна была выдать 20 декабря 1998 г. в течение 18 мин 43 сек начиная с 16:59:57 EST (21:59:57 UTC) на расстоянии 242000 км от цели. Приращение скорости КА должно было составить 650 м/с – две трети от разности в скоростях.
Второй и третий (резервный) импульсы RND2 и RND3 планировались на 28 декабря и 29 декабря. RND2 планировался в 11:00:00 EST с длительностью 9 мин 09 сек и с приращением скорости еще 294 м/с. После него скорость КА относительно Эроса стала бы менее 30 м/с. Четвертый импульс RND4 3 января 1999 г. на расстоянии 5000 км должен был сократить относительную скорость еще на 22 м/с.
Наконец, 10 января в 10:00 EST на расстоянии 1000 км от Эроса был запланирован импульс OIM в 8.45 м/с. После него аппарат имел бы относительную скорость 8 м/с и оказался бы на начальной орбите искусственного спутника Эроса с наклонением 135° и минимальным и максимальным расстоянием 400x14285 км. Затем были запланированы годичный цикл исследований Эроса с различных орбит и даже... посадка на астероид и взлет с него.
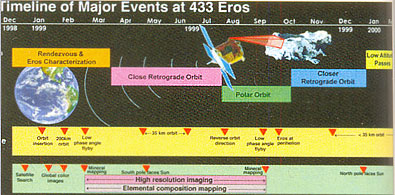 График планируемых работ у Эроса |
Как все было
16 декабря станция находилась в 263.6 млн км от Солнца и в 579.6 тыс км от Эроса. Гелиоцентрическая скорость NEAR была 19.05 км/с, а скорость относительно Эроса – 0.973 км/с.
Все программы для первого импульса RND1, а также для резервного импульса CB-1A (на случай, если RND1 не удастся) были заложены на борт. 19 декабря отключили все приборы, кроме камеры – чтобы иметь запас по электрической мощности.
20 декабря в заданное время аппарат начал отработку первого импульса тяги. Однако около 17:10 EST сигнал с КА был потерян. Правда, допплеровские данные, полученные около 17:40, позволяли надеяться, что передатчик аппарата все еще работает.
Без паники!
В течение суток группа управления непрерывно пыталась восстановить связь и выяснить состояние аппарата. Лишь бы только он не пропал совсем, как в августе 1993-го Mars Observer! К счастью, нет. 21 декабря в 20:00 EST одна из станций сети DSN получила сигнал несущей с NEAR. Сеанс управления продолжался всю ночь, утром начали прием и анализ записанной телеметрии, и 22 декабря в 14:19 NEAR был возвращен в норму. После этого научный руководитель проекта Эндрю Ченг смог с облегчением объявить: «Кажется, наш аппарат еще не прожил все свои жизни». Все системы NEAR, включая двигательную установку, оказались исправны.
ü В течение 1998 г. продолжалась проработка проекта Deep Space 3 по программе New Millenium (НК №21/22, 1998). В ходе этого количество аппаратов, составляющих оптический интерферометр, было уменьшено с трех до двух, так как эксперименты показали, что интерферометрические наблюдения возможны при разведении двух КА на расстояние 1 км. Тем самым был получен выигрыш в выводимой массе и в стоимости проекта. В марте 1999 г. планируется выбрать партнера от промышленности для совместной реализации проекта (работу в этой области ведет компания TRW), а в августе провести защиту системных требований и архитектуры миссии. Запуск по проекту Deep Space 3 планируется в декабре 2001 г. - С.Г. ü Компания SpaceDev, Inc. (США) объявила 15 декабря о выдаче Лаборатории реактивного движения контракта на резервирование ресурсов Сети дальней связи DSN для обеспечения сближения коммерческой АМС NEAP с астероидом Нереус. Как заявил «главный архитектор» миссии NEAP Рекс Риденур, хотя запуск станции планируется на начало 2001 г., а двухмесячный цикл работ у Нереуса — на середину 2002 г., подать заявку на использование 34-метровых антенн сети DSN нужно было уже сейчас. Это первый случай заказа ресурсов сети DSN частной фирмой. Кроме этого, в период до осени 1999 г. JPL выполнит оценку совместимости телекоммуникационной системы NEAP со средствами DSN и будут определены объем и стоимость услуг Лаборатории по управлению аппаратом. Следует заметить, что источника финансирования проекта NEAP у компании пока нет. - И.Л. ü По сообщению JPL Universe от 8 января, NASA и ISAS подписали временное соглашение об участии в проекте Muses-C доставки грунта с астероида Нереус. Американская сторона отправит на Нереус наноровер («астероидоход») Muses-CN, разработкой которого руководит Росс Джоунз из Лаборатории реактивного движения. Детальный проект наноровера наполовину закончен, получены технические модели моторов для наноровера, изготовлены печатные платы для экспериментального аппарата для отработки на нем программного обеспечения. Получены также предложения ученых о проведении научных экспериментов с использованием наноровера. Тем временем в Исследовательском центре имени Эймса испытаны теплозащитные материалы, разработанные японской стороной. — С.Г. |
Что же произошло?
Основная ДУ вышла на режим нештатно, был превышен допуск на боковое ускорение. В соответствии с заложенной логикой система управления прервала работу ДУ всего через 1 сек. (Такая же ситуация имела место во время проведения большой траекторной коррекции DSM, но тогда отклонения оказались в пределах допуска.)
После отсечки импульса КА в течение 40 сек поддерживал свою ориентацию, но затем начал несанкционированно работать бортовыми двигателями ориентации и стал кувыркаться. Был автоматически запущен защитный режим с ориентацией на Землю, но из-за потери ориентации через 4 мин после начала маневра сформировался признак низкого напряжения, и аппарат отключил всю полезную нагрузку, включая оба записывающих устройства и оба приемопередатчика. После этого NEAR начал ориентацию на Солнце, и, как показала телеметрия, напряжение было подано вновь через 27 минут. Затем несколько раз проходила автоматическая процедура сброса накопленного момента. К счастью, при построении ориентации и сбросе момента станция израсходовала всего 30 кг гидразина. Аппарат вновь включил передатчики через сутки, когда истек допустимый срок автономной работы.
В утешение
Если бы маневр RND1 был проведен до утра 23 декабря, последующее сближение могло выполняться по штатной схеме. (Все это время станция и астероид сближались со скоростью почти 1000 м/с, и без коррекции NEAR должен был пройти примерно в 3600 км от Эроса после полудня 23 декабря.) Хотя было ясно, что аппарат исправен и управляем, управленцы просто не успевали подкорректировать параметры допуска, чтобы сбой 20 декабря не повторился. Дальнейшее сближение пришлось отложить.
 Снимки, сделанные на подлете к Эросу 23 декабря с 10:44 по 12:44 EST (11100-5300 км), были опубликованы в тот же день. APL/NASA  Два снимка Эроса, сделанные 23 декабря в 13:44 (с минимального расстояния 3700 км) и 14:05 EST (4000 км). Фазовый угол 119°, наименьшие различимые детали имеют размер 400 м. Снимки опубликованы 8 января 1999 г. APL/NASA. |
«В утешение» ученые получили теоретическую возможность предварительно исследовать форму и размеры астероида и попытаться отыскать его спутники. Чтобы превратить ее в реальность, было сделано невозможное – используя наработки для орбитального этапа, Энн Харч и Морин Белл из Корнеллского университета и Скотт Мёрчи из APL в течение 12 часов, 22 декабря с полудня до полуночи, написали программу съемки Эроса на пролете. Ночью она была проверена, утром 23 декабря загружена на борт, в 10:22 станция получила разрешающую команду и через 8 минут, в 10:30 EST, начала исполнение программы!
23 декабря в 13:42 EST аппарат сблизился с астероидом до минимального расстояния 3700 км. За 6.5 часов было сделано 1026 снимков мультиспектральной камерой MSI, проведена спектральная съемка ИК-спектрометром NIS и магнитные измерения, которые были записаны на борту и в последующие дни переданы на Землю. Были также получены данные допплеровского смещения радиосигнала и телеметрия, по которым можно уточнить массу и плотность астероида.
Еще ничего не потеряно
После TCM-15 NEAR располагал запасом скорости в 1169 м/с. Провал маневра 20 декабря не был непоправимым, но надолго откладывал новую встречу с Эросом. 27 декабря APL и NASA решили выполнить разгонный маневр DSM-2 в период с 31 декабря по 10 января 1999 г. Маневр, равный по суммарному импульсу комбинации RND1+RND2, давал возможность догнать Эрос и выйти на орбиту вокруг него в середине февраля 2000 г.
К 30 декабря на борт были заложены новые параметры допуска на боковое ускорение, и 3 января в 12:00 EST маневр DSM-2 начался. Сначала на 3 мин включили гидразиновые ДУ («стабилизирующий ускоряющий импульс»), приращение скорости составило 5 м/с. Затем на 20.6 мин включили двухкомпонентную маршевую ДУ. Импульс был отработан точно, приращение скорости аппарата составило 940 м/с (расчетное – 939 м/с).
В момент маневра станция была в 910.1 тыс км от Эроса. Теперь NEAR идет «по внутренней дорожке» – чуть ближе к Солнцу, чем Эрос, и потому немного быстрее.
12 января группа управления вернулась к односменной работе. С помощью MSI выполняются навигационные съемки. Очередная коррекция TCM-18 для устранения погрешности маневра DSM-2 запланирована на полдень 20 января. КА получит приращение скорости 14 м/с и изменит ее направление примерно на 1°.
«Мы еще встретимся с Эросом! – обещает менеджер программы NEAR д-р Роберт Фаркуар (Robert W. Farquhar). – Не думаю, что опоздание на встречу уменьшит ценность научных данных, которые, я надеюсь, мы получим.»
По сообщениям группы управления КА, APL, NASA, Корнеллского университета, AP
опаздывает на свидание с Марсом
И.Лисов. «Новости космонавтики»
Для японской АМС Nozomi («Надежда») вторая половина декабря была критически важным периодом полета. В это время станция должна была перейти с промежуточной орбиты ИСЗ на траекторию полета к Марсу.
 Траектория и маневры Nozomi у Луны и Земли в первые шесть месяцев полета |
Напомним, что Nozomi была запущена 4 июля 1998 г. (НК №15/16,1998) и выведена на сильно вытянутую орбиту ИСЗ с апогеем за орбитой Луны. 24 сентября станция выполнила пролет Луны, в результате которого перешла на еще более вытянутую орбиту с периодом около 3 месяцев (см. рис). На нисходящей ветви траектории (с точки зрения земного наблюдателя, станция приближалась со стороны созвездий Орла и Щита) были запланированы еще два маневра — гравитационный при пролете Луны 18 декабря и гравитационно-активный маневр в перигее околоземной орбиты 20 декабря. В последнем случае прохождение перигея должно было быть совмещено с 7-минутным доразгоном с помощью бортового двигателя станции. Последний маневр обеспечивал выход станции на межпланетную трассу.
18 декабря в 07:34 UTC станция прошла на минимальном расстоянии 4547 км от центра Луны (в 2809 км над поверхностью). Приблизившись к Земле со скоростью около 10.9 км/с, 20 декабря в 08:09:54 UTC станция прошла в 7381 км от ее центра (в 1003 км над поверхностью). Что именно не получилось при доразгоне, нам неизвестно (японские специалисты, ведущие этот проект, не отличаются словоохотливостью), но известен результат: набранная геоцентрическая скорость оказалась недостаточной, а направление ее вектора — неточным. Станция не вышла на расчетную межпланетную трассу.
Для спасения Nozomi 20 декабря в 23:01 и 23:39 UTC были выполнены две коррекции траектории, обеспечившие значительное приращение скорости ценой большого расхода бортового запаса топлива. В связи с этим представитель Института космических и астронавтических наук (ISAS) профессор Итиро Накатани заявил, что программу полета, возможно, придется изменить.
Реальная цена событий 20 декабря стала известна лишь три недели спустя. 12 января представитель ISAS Цутому Нумата сообщил, что станция выйдет на орбиту искусственного спутника Марса не 11 октября 1999 г., как было запланировано, а только в декабре 2003 г.! До этого станция будет находиться на гелиоцентрической орбите; причем летом 2003 г. выполнит сближение с Землей с гравитационным разгоном. Объяснение было дано следующее: баллистические условия встречи с Марсом в разные годы различны, и в 2003 г. относительная скорость станции и планеты будет меньше и для выхода на орбиту потребуется меньше топлива. Расчетная орбита спутника Марса имеет высоту в перицентре 155 км и в апоцентре — 43500 км.
Нумата заявил, что отсрочка на 4 года не приведет к сокращению научной программы Nozomi. Аппарат предназначен для исследования взаимодействия марсианской атмосферы с солнечным ветром и измерения скорости потери кислорода.
По сообщениям ISAS, АР, ИТАР-ТАСС
Deep Space 1 отрабатывает автоматическую навигацию И.Лисов. «Новости космонавтики» Американская экспериментальная АМС Deep Space 1, запущенная 24 октября 1998 г. для отработки перспективных технологий межпланетных КА, успешно продолжает полет. 18 декабря группа управления выключила ионный двигатель станции, работавший с 14 декабря, и приступила к тестированию автономной навигационной системы AutoNav. Напомним, что эта система выполняет с помощью камеры MICAS съемку астероидов на фоне звезд и по имеющимся на борту базам координат звезд и параметров орбит астероидов определяет текущие гелиоцентрические координаты КА. Затем она дает команды на разворот КА и наддув баков ксенона и запускает двигатель NSTAR на необходимом уровне мощности для создания необходимой тяги в нужном направлении. Система учитывает, какую максимальную мощность можно снять с солнечных батарей станции и сколько потребляют другие системы. (Доступная мощность падает по мере удаления от Солнца по двум причинам: солнечные батареи дают меньший ток, а на работу нагревателей уходит больше.) Каждые 12 часов «навигатор» AutoNav уточняет направление и уровень тяги в соответствии с имеющимся на борту планом. Начатый 18 декабря разгон под управлением AutoNav был прерван на несколько часов 21 декабря. Во время перерыва AutoNav ориентировала станцию для выполнения тестовых съемок астероидов и звезд. Цель испытаний – усовершенствовать бортовые алгоритмы обработки этих снимков с учетом фактических характеристик камеры MICAS. На рождественские каникулы двигатель Deep Space 1 был оставлен в работе; за поведением аппарата наблюдала дежурная смена операторов. 5 января 1999 г. «навигатор» выключил двигатель; тем самым был закончен первый этап разгона станции. (7 января был проведен еще один сеанс съемки астероидов и звезд камерой MICAS. Разворотом станции управляла система AutoNav.) За время после первого успешного включения 24 ноября двигатель NSTAR проработал более 850 часов, что в несколько раз превышает установленный программой испытаний DS1 минимум. За это время произошло 59 кратковременных автоматических отключений, защищающих системы ионной ДУ от повреждения частицами. Интересно, что в наземном эксперименте в вакуумной камере за первые 850 часов отключения проходили 240 раз. Очевидно, в космосе ионному двигателю работать «легче». Системы управления мощностью, хранения и подачи ксенона работали штатно. «Навигатор» AutoNav также прошел испытания без замечаний. 6 января был во второй раз включен прибор для измерения параметров плазмы PEPE. В первый раз PEPE включали 10 декабря, когда станция находилась более чем в 7.2 млн км от Земли; первый эксперимент показал, что работа двигательной установки станции не мешает прибору вести измерения. 6 января было опробовано новое программное обеспечение PEPE. 8 января прибор был переведен в режим максимальной частоты опроса, и до 10 января вел измерения одновременно с плазменным спектрометром CAPS на АМС Cassini. Вечером 10 января были проведены испытания твердотельного усилителя диапазона Ka. Сигналы принимала станция Сети дальней связи в Голдстоуне. По состоянию на 12 января станция удалилась от Земли более чем на 17 млн км. По сообщениям JPL, Hughes, Юго-Западного исследовательского института |
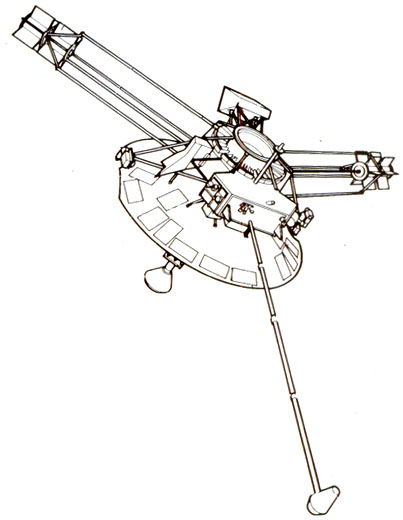
Pioneer 10 продолжает
работу и задает загадки
И.Лисов. «Новости космонавтики»
1 января. Почти два года назад, 31 марта 1997 г., проект Pioneer был официально закрыт, финансирование прекращено и последняя оставшаяся «в живых» станция Pioneer 10 отправлена «на пенсию». Напомним, что она была запущена 3 марта 1972 г. и впервые в истории исследовала Юпитер с пролетной траектории 4 декабря 1973 г. После этого станция вела исследования физических условий околосолнечного пространства. До 1998 г. она оставалась держателем рекорда по расстоянию от Солнца, и лишь недавно ее «обогнал» Voyager 1.
Хотя проект был официально закрыт, станция Pioneer 10 осталась «работающим пенсионером». Сотрудникам Исследовательского центра имени Эймса, занимающимся управлением АМС Lunar Prospector, было разрешено продолжать управлять «Пионером» в порядке тренировки персонала до тех пор, пока это не мешает осуществлению других межпланетных проектов. Поэтому работа со станцией и прием научной информации продолжается, хотя и в сокращенном объеме.
Станция находится на пределе работоспособности по электропитанию – радиоизотопные генераторы почти истощены. Постоянно работает потребляющий малую мощность гейгеровский телескоп GTT, и раз в неделю на протяжении нескольких часов снимаются данные с более «жадного» на электричество прибора заряженных частиц CPI.
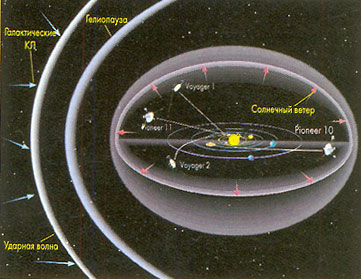 Куда разлетаются дальние межпланетные станции? |
По состоянию на 1 января 1999 г. станция ушла от Солнца на расстояние 71.66 а.е. и удаляется от него в общем направлении на Альдебаран со скоростью 12.24 км/с. Расстояние от станции до Земли в этот день составляло 10.58 млрд км. Большая ось земной орбиты видна под углом около 2°.
Текущая ориентация станции позволит ей поддерживать связь с Землей в течение еще нескольких месяцев. Принятые за это время данные с GTT должны дать ответ на вопрос, находится ли Pioneer 10 все еще в пределах гелиопаузы или вышел в межзвездное пространство. Дело в том, что в апреле и начале мая 1998 г. наземные нейтронные детекторы зарегистрировали заметное (примерно на 4%) и быстрое снижение интенсивности космических лучей. Солнечный ветер, двигаясь со скоростью около 450 км/с, достигает станции за 9 месяцев. Если Pioneer 10 все еще в гелиопаузе – он должен «почувствовать» это событие. Если же он покинул «сферу влияния» Солнца, то падения в интенсивности космических лучей не будет.
Кто тянет станцию за хвост?
Недавно Pioneer 10 оказался в центре бурной научной дискуссии: с его «помощью» под сомнение была поставлена справедливость ньютоновской механики. Впервые необычный эффект был описан на страницах журнала New Scientist за 12 сентября, а научная публикация состоялась 5 октября 1998 г. в Physical Review Letters.
Еще в 1980 г. руководитель исследований по небесной механике проекта Pioneer 10 Джон Андерсон (John Anderson, Лаборатория реактивного движения) заподозрил, что скорость станции уменьшается со временем чуточку быстрее, чем должна под влиянием тяготения Солнца. Впечатление было такое, как будто станция притягивается Солнцем с чуть большей силой, чем предписывает закон Ньютона. Однако доказать статистическую достоверность этого эффекта долго не удавалось.
Несколько лет назад Андерсон и исследователь Лос-Аламосской национальной лаборатории Майкл Нието (Michael Nieto) начали поиск возможных объяснений аномального ускорения станции на основе идеи Нието о возможных различиях в воздействии гравитации на вещество и антивещество. Для проверки своих выводов в 1995 г. они привлекли Филипа Лэинга (Philip Laing) из компании Aerospace Corp. и Энтони Лю (Anthony Liu) из Astrodynamic Sciences Co.
Исследовав данные по допплеровскому смещению сигнала станции Pioneer 10 после 1987 г., Андерсон, Нието и их коллеги смогли выявить систематическое отклонение, которое соответствует дополнительному ускорению в 0.0000000008 м/с2. Это микроскопическое тормозящее ускорение – оно смогло бы остановить машину, едущую со скоростью 60 км/ч, через 650 с лишним лет – с точки зрения небесной механики является заметной и существенной величиной. Сходные отклонения были выявлены и при анализе данных по другим дальним КА – Pioneer 11, который движется почти в противоположную сторону от Солнца, Ulysses, и, по предварительным данным, Galileo.
Естественно, исследователи попытались учесть все возможные источники искажения допплеровских данных и все гравитационные и негравитационные силы, действующие на космический аппарат. «Мы работали над этой проблемой несколько лет, – заявил Андерсон в интервью New Scientist, – и учли все, что могли.» «Контролеры» из Aerospace и Astrodynamics Sciences расписались в том, что в качестве источников аномального ускорения исключены отказы аппаратуры наземных станций, ошибки в программах определения орбит, используемых в JPL, и ошибки планетных эфемерид, ошибки ориентации Земли, ее прецессии и нутации, притяжение тел из пояса Койпера или притяжение Галактики, влияние солнечного ветра и межпланетной среды, негравитационные эффекты солнечного давления и ориентации КА, тепловое излучение и распад плутония в радиоизотопных генераторах, а также дрейф эталонов времени, эффекты общей теории относительности и даже возможность распространения гравитации с конечной скоростью.
Исчерпав известные объяснения дополнительного замедления АМС, исследователи рассмотрели экзотические возможности: воздействие скрытой массы и отличие закона тяготения от ньютоновского. Первое было отклонено на том основании, что скрытой массы потребовалось бы слишком много, и она бы воздействовала и на другие тела Солнечной системы. Оставшийся вариант объяснения формулируется примерно так: если аномальное радиальное ускорение, воздействующее на вращающийся КА, является гравитационным по природе, оно не универсально и воздействует на тела с массой порядка 1000 кг значительнее, чем на тела планетного масштаба.
Естественно, признать подобный вывод очень трудно, и оппоненты немедленно начали поиск неучтенных факторов. Так, астроном из Университета Джона Гопкинса Эдвард Мёрфи указал на тепловое излучение, которое идет в антисолнечном направлении с жалюзи-радиаторов системы электропитания. Джонатан Катц из Университета Вашингтона в Сент-Луисе доказывал, что не учтено отражение тепла от антенны системы связи. Филип Лэинг склоняется к мысли, что причина кроется в неучтенной утечке газа через неидеальные клапаны. Андерсон считает, что для объяснения наблюдаемого эффекта этого недостаточно.
«Очевидно, необходимы дополнительный анализ, наблюдения и теоретическая работа», — заключили Андерсон с соавторами. Они готовы признать, что наблюдаемый эффект можно объяснить известными законами физики. Но есть и определенная вероятность того, что обнаружено нечто совершенно новое.
По сообщениям группы управления КА, New Scientist, Aerospace Corp.
ИСКУССТВЕННЫЕ СПУТНИКИ ЗЕМЛИ |
Американская часть проекта Solar-B Сообщение NASA 23 декабря NASA объявило о выборе исследований, которые составят американскую часть проекта японо-американо-английской космической обсерватории Solar-B. Проект Solar-B ведет Институт космических и астронавтических наук Министерства образования Японии. Его цель - исследовать происхождение короны Солнца и связи между тонкой магнитной структурой на поверхности светила с динамическими процессами в короне. Аппарат должен быть запущен в 2004 г., он будет нести три основных инструмента: оптический телескоп с апертурой 50 см и комплексом приемной аппаратуры, обеспечивающий количественные измерения магнитных полей с разрешением около 110 км, рентгеновский телескоп для съемок высокотемпературной короны и видовой спектрометр крайнего УФ-диапазона для диагностики событий. ISAS изготовит КА и его оптический телескоп, организует запуск и отвечает за научную программу в целом. Научные группы будут включать японского научного руководителя, отвечающего за интеграцию инструмента с КА, и соруководителя от страны - изготовителя инструмента. NASA выделяет 3.3 млн $ на исследовательские работы в период до начала лета 1999 г. по следующим направлениям: - комплект инструментов фокальной плоскости FPIP (Focal Plane Instrument Package) для оптического телескопа, включающий широкополосный и узкополосный приборы и спектрополяриметр. Разработчик - д-р Алан Тайтл (Alan Title, Центр перспективных технологий Lockheed Martin Corp.); - рентгеновский телескоп XRT (X-Ray Telescope). Это усовершенствованный вариант прибора, установленного на японском КА Yohkoh (Solar-A). Разработчик - д-р Леон Голуб (Leon Golub, Смитсоновская астрофизическая обсерватория); - видовой спектрометр крайнего УФ-диапазона EIS (EUV Imaging Spectrometer). Ведущим по этому прибору является профессор Леонард Калхейн (Leonard Culhane, Маллардская лаборатория космических наук, Юниверсити-Колледж, Британия). Американскую часть ведет д-р Джордж Дошек (George Doschek) из Военно-морской исследовательской лаборатории. Головным центром NASA по этому проекту назначен Центр космических полетов имени Маршалла. Полномасштабная разработка инструментов начнется в январе 2000 г. Для NASA Solar-B является вторым проектом в семействе аппаратов для изучения солнечно-земных связей. Первым стал проект TIMED (НК №26, 1997), запуск по которому запланирован на май 2000 г. Сокращенный перевод С.Головкова |
Globalstar склоняется к западным носителям
М.Тарасенко. «Новости космонавтики»
11 января компании Boeing и Space Systems/Loral завершили оформление соглашений о запуске в общей сложности 28 КА Globalstar на семи ракетах Delta 2. Незадолго до этого, 21 декабря, консорциум Globalstar подписал соглашение с компанией Arianespace о запуске шести спутников Globalstar на РН Ariane 4.
Таким образом, у российских и украинских ракетчиков остается все меньше шансов на то, что их услуги по развертыванию второй после Iridium глобальной системы персональной спутниковой связи будут востребованы не то что в расширенном, но даже в первоначально оговоренном объеме.
Новые контракты предусматривают запуск шести РН Delta в 1999 г. и одной - в 2000 г. (по четыре спутника на каждой), а также РН Ariane 4 с шестью спутниками в сентябре 1999 г. В период со второго квартала 1999 г. по первый квартал 2000 г. с мыса Канаверал должно быть запущено пять РН Delta модели 7420 (с четырьмя твердотопливными ускорителями (ТТУ) на первой ступени, аналогичными тем, что были использованы для запуска первых восьми спутников Globalstar в феврале и апреле 1998 г.). Остальные два запуска планируется осуществить с авиабазы Ванденберг, для чего будут использоваться более мощные (и несколько более дорогие) ракеты модели 7920 (с девятью ТТУ). Оба эти запуска намечены на четвертый квартал 1999 г. Такая странная комбинация, вероятно, вызвана загрузкой стартовых комплексов на мысе Канаверал ранее заказанными запусками.
Напомним, что Globalstar уже располагает контрактами с КБ «Южное» на три запуска РН «Зенит» по 12 КА на каждой (включая замену аварийного запуска) и с российско-французским СП Starsem на три запуска РН «Союз» по четыре КА на каждой. После аварии «Зенита» в сентябре 1998 г. Globalstar зарезервировал дополнительные опционы на три пуска «Союзов» и три - Delta 2. Это должно было обеспечить гарантированное развертывание минимально необходимой группировки из 32 КА к III кварталу 1999 г., когда Globalstar надеется начать эксплуатацию системы, даже в случае отказа от использования любого из трех носителей. Полный состав группировки первоначально предусматривал 48 основных и 8 резервных КА, но после утери 12 спутников на «Зените» было решено сократить ее с 56 до 52 КА за счет уменьшения числа резервных спутников с 8 до 4. Такая группировка должна быть развернута к концу 1999 г.
Вряд ли можно сомневаться, что причиной такого «крена на Запад» стала затяжка в подготовке российско-американского межправительственного соглашения о технологических гарантиях в отношении ввозимых американских спутников. Из-за этого уже не удалось осуществить в намеченное время первые два запуска КА Globalstar на «Союзах» (после аварии «Зенита» планировалось осуществить их в ноябре и декабре 1998 г.).
Подписанные с Boeing и Arianespace новые контракты теоретически позволяют Globalstar к декабрю 1999 г. иметь на орбите 50 спутников, не используя РН «Зенит» и дополнительные РН «Союз».
Пока еще Globalstar не потерял веру в возможность использования «Союзов»: контракт с Arianespace оговаривает, что если сентябрьский запуск не потребуется для завершения группировки, то Loral использует его для другой нагрузки. Однако чем дольше будут продолжаться проволочки, тем больше вероятность того, что заказы Globalstar уплывут если не к Boeing'у, то к Arianespace.
Loral Space & Communications является крупнейшим совладельцем компании Globalstar (42% уставного капитала) и одновременно ее управляющей компанией.
По сообщениям Boeing, Loral, Globalstar, Arianespace
«Сесат» проходит испытания в НПО ПМ Пресс-служба НПО Прикладной механики 6 января 1999 г. французская фирма Alcatel Space Industries доставила в Красноярск модуль полезной нагрузки (МПН) для спутника «Сесат» (SESat). Таким образом железногорское НПО прикладной механики им. академика М.Ф.Решетнева приступило к завершающему этапу создания спутника. «Сесат» изготавливается по заказу Европейской организации спутниковой связи Eutelsat. Спутник предназначен для предоставления широкого диапазона телекоммуникационных услуг, в том числе телевидения, телефонной связи, развития сетей передачи данных. Спутник будет выведен в орбитальную позицию 36°в.д. ракетой-носителем «Протон» летом 1999 г. КА состоит из модуля служебных систем, созданного кооперацией российских предприятий во главе с НПО ПМ, и модуля полезной нагрузки европейской кооперации под руководством фирмы Alcatel Space Industries. «Сесат» соответствует мировым требованиям по срокам работы на орбите, надежности, мощности и качеству передаваемого сигнала. С 8 января модуль полезной нагрузки проходит индивидуальные испытания, после чего он будет состыкован с модулем служебных систем. Это и будет космический аппарат «Сесат» - первый результат интеграции российской и европейской космических телекоммуникационных технологий. После стыковки модулей аппарат пройдет весь комплекс испытаний и затем отправится на космодром Байконур для предстартовой подготовки и запуска на орбиту. |
назад