вернёмся в библиотеку?
«Наука и человечество» 1991 год
 Юрий Николаевич Глазков (р. 1939) — летчик-космонавт СССР, доктор технических наук, заместитель начальника Центра подготовки космонавтов имени Ю. А. Гагарина, лауреат Государственной премии СССР, Герой Советского Союза. В 1977 вместе с В. В. Горбатко совершил семнадцатидневный полет на космическом корабле «Союз-24» и орбитальной станции «Салют-5». Награжден Золотой медалью имени К. Э. Циолковского АН СССР, Почетным дипломом имени В. И. Комарова Международной авиационной федерации (ФАИ). Автор научно-популярных книг, фантастических и детективных повестей и рассказов. |
Ю. Н. Глазков
Икар
парит над планетой
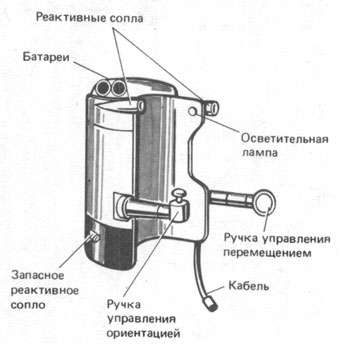
Рис. 1. Вариант установки перемещения космонавта. Она крепится к скафандру за спиной оператора, который в автономном полете двумя ручками управления подает команды на реактивные сопла, обеспечивающие движение
 |
Начало века. Самолет братьев Райт: крылья, хвост, ручки управления, двигатель, винт... и человек, обдуваемый упругим встречным потоком. Потом появились металлические стенки, герметичный корпус, реактивная струя, но одновременно и тоска по утраченному контакту со стихией. Вот так, наверное, и рождаются идеи парящих дельтапланов (опять лицом к лицу с ветром), несущихся по волнам досок с парусом и без него, аквалангов.
Космос заявил о себе. Человечество уже нельзя представить без космических полетов и космонавтов. Они взлетают и садятся, «закупоренные» в тяжелых металлических капсулах. Крупные станции работают в околоземном пространстве по пять—семь лет и дольше. «Салют-7» переведен на орбиту, на которой гарантируется его существование до 2000 г.
Долго летать непросто: бывают и отказы, без ремонта, порой с выходом в открытый космос, не обойтись. Космонавтам приходится совершать мини-путешествия по внешней поверхности станции, иной раз проходя по 20 м. «Прокладывая трассу» к месту монтажа или ремонта, они протискиваются сквозь «частокол» антенн и датчиков, преодолевают всяческие препятствия.
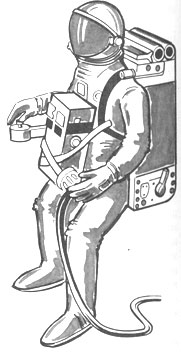
Рис. 2. Установка перемещения космонавта крепится к скафандру сзади, а спереди размещается пульт, куда выводятся параметры различных систем и подаются аварийные сигналы
 |
А вот другая задача: перелет с одного космического объекта на другой. Такая операция была осуществлена в 1986 г., когда экипаж покинул станцию «Мир», с тем чтобы, добравшись до «Салюта-7», взять оттуда наиболее ценную работоспособную аппаратуру и привезти обратно. Тогда космический корабль «Союз Т-15» преодолел расстояние в тысячи километров.
Мы уже знаем, что такое групповые полеты с взаимным маневрированием, облетом, сближением, стыковкой, перестыковкой, ремонтными операциями. А «космическая жизнь» требует все большей свободы действий. Мы хотим встретиться с космосом «лицом к лицу», покинуть металлический корпус станции или корабля, сами двигаться в космосе, используя минимальные индивидуальные средства: скафандр и установку перемещения космонавта.
Установка, крепящаяся к скафандру, содержит все необходимое для жизнеобеспечения и передвижения в космосе: систему управления и исполнительные органы, блоки энергоснабжения, радиосвязи, контроля и пр. По своим функциональным возможностям это миниатюрный автономный космический корабль, способный двигаться по орбите в течение некоторого времени. Установка позволяет перемещаться поступательно, вращаться вокруг центра масс, лететь по инерции (в земном понимании — парить) вблизи космических объектов или перелетать с одного из них на другой. Понятно, что расстояния здесь не такие, какие преодолевали, например, «Союзы».
Конечно же, не ради острых ощущений и не из-за любопытства создаются и уже используются такие летательные аппараты. Довольно легко вообразить себе ситуации, где они будут остро необходимы.
Нужно, скажем:
перелететь на находящийся рядом спутник;
осмотреть орбитальную станцию (корабль), так сказать, снизу доверху;
доставить небольшой груз на другой объект или с одного «края» орбитального комплекса на другой, минуя «частокол» антенн и датчиков;
провести ремонт в таком месте обслуживаемого объекта, которое труднодоступно при передвижении по внешней поверхности (представим себе, что вышел из строя прибор или датчик, установленный на хрупкой ленточной конструкции антенн);
пересадить людей из одного корабля в другой, если первый из них отказал, а стыковка невозможна;
спасти космонавта, потерявшего работоспособность в открытом космосе;
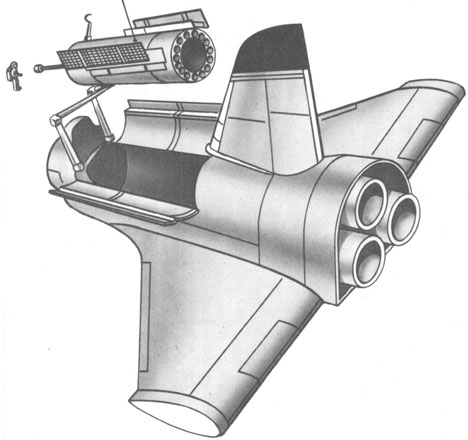
Рис. 3. Космонавт, совершающий автономный полет, осматривает выдвинутый из грузового отсека корабля многоразового использования и подготовленный к запуску спутник. Этот способ доставки в околоземное пространство и вывода на орбиту такого рода автоматических объектов уже применяется |
Рис. 4. Так выглядело бы обследование ленточной антенны пилотируемого орбитального комплекса, выполняемое космонавтом в автономном полете
 |
выполнить инспекцию в космосе или (пусть это не покажется преждевременным) работы по обследованию, осмотру, сбору, утилизации потерянного, неиспользуемого, неработоспособного оборудования.
Перечень задач можно было бы и продолжить.
Внешне установка выглядит несложно (рис. 1). Она крепится к скафандру космонавта за спиной, а спереди (в зоне видимости) добавляется еще пульт, на который выводятся параметры, характеризующие функционирование систем, и сигналы аварийного режима (рис. 2). Рис. 3 показывает, как космонавт в автономном полете мог бы совершать осмотр подготовленного к сбросу с многоразового транспортного корабля спутника. На рис. 4 мы видим, как выполнялось бы обследование ленточной антенны, конструкция которой (из-за недостаточной жесткости) не позволяет никак иначе подобраться к нужным узлам. На рис. 5 представлен вариант спасения космонавта, терпящего бедствие.
Казалось бы, создать подобное устройство с малым радиусом действия значительно проще, чем космический корабль или станцию. В каком-то смысле, да, но психологически для инженера, привыкшего иметь дело со сложными конструкциями, переключиться на проектирование индивидуального летательного аппарата довольно-таки трудно, и я бы сказал, что это задача новаторского характера.
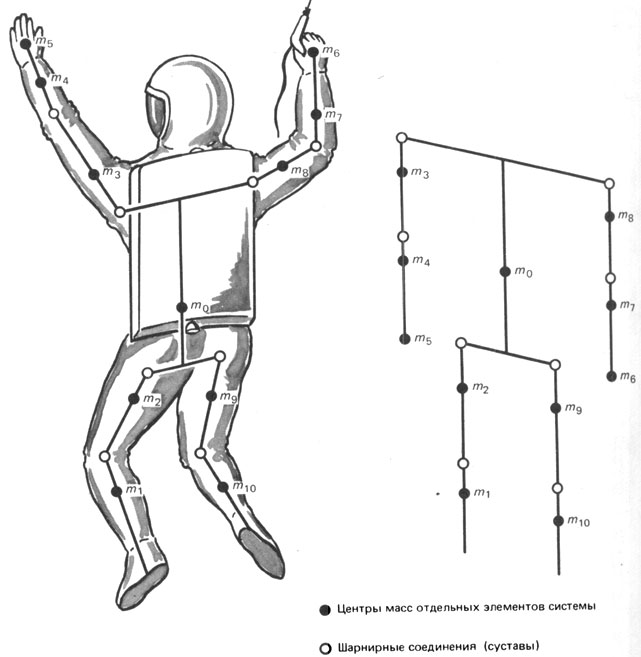
При разработке таких важных элементов, как системы ориентации и стабилизации, исполнительные органы, неизбежно приходится сочетать традиционные методы с весьма оригинальными подходами. Если, например, говорить о динамических особенностях конфигурации «космонавт-установка», то она принципиально отличается от привычных космических объектов прежде всего тем, что обладает множеством «подвижных» элементов и в целом не может рассматриваться как жесткое тело (на рис. 6 смоделированы одни лишь конечности космонавта, а ведь есть еще трубопроводы, фал, перевозимый груз и пр.).
А человеческий фактор? Человек в системе выступает одновременно в роли и оператора, и объекта управления. При пилотировании весь информационный поток формируется визуально: «на глаз» оцениваются свое орбитальное движение и отклонения от расчетной траектории, по восприятию габаритов наблюдаемых объектов и расположению их элементов устанавливается «геометрия расстояний».
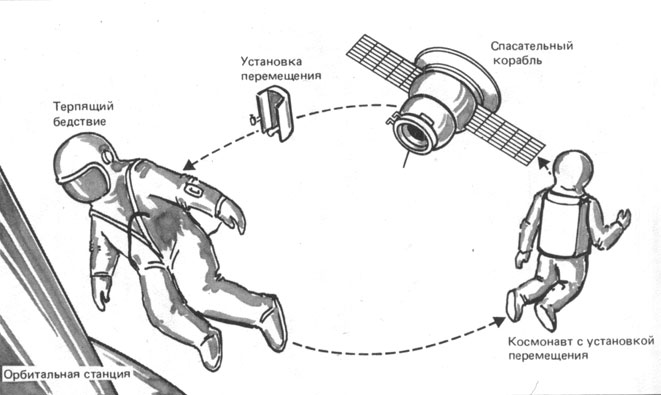
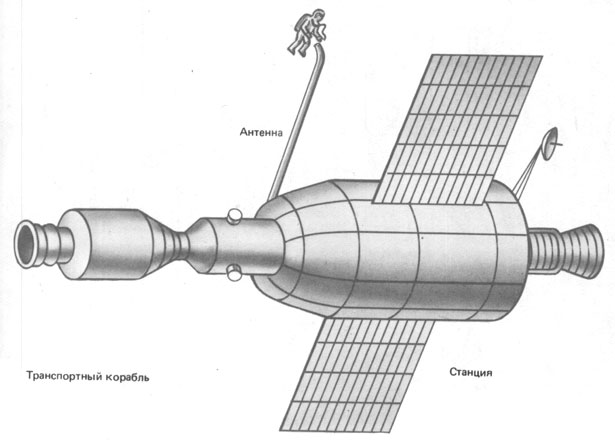
Рис. 5. Операция по спасению терпящего бедствие в космосе с помощью установки перемещения космонавта. Из-за неполадок на орбитальной станции (аварийная ситуация могла сложиться и в открытом космосе) экипажу незамедлительно нужно вернуться на Землю. Со срочно прибывшего спасательного корабля высылается автоматически управляемая установка (или несколько установок). Получив ее, космонавт перелетает к спасательному кораблю
|
Рис. 6. Биомеханическая модель системы «космонавт — установка перемещения космонавта». При математическом моделировании реальный объект заменяется системой нескольких материальных тел, имеющих соответствующие массы и связанных шарнирными соединениями (имитация главных суставов). m0 — масса несущего тела (туловища оператора и установки), все остальные — массы носимых тел (конечностей оператора и переносимых им грузов) |
Психологическое напряжение при полете на индивидуальной установке гораздо больше, чем на кораблях и станциях, в том числе из-за ограниченного числа приборов, используемых при управлении. Установка должна быть легко адаптируемой к физиологическим параметрам человека. Чтобы обеспечить безопасность полета, ее систему управления нужно сделать весьма универсальной, т. е. пригодной для пилотируемого и беспилотного режимов, дистанционного управления.
Чем же все-таки отличаются условия эксплуатации индивидуального аппарата от тех, в которых находится человек, совершающий полет на «обычных» космических объектах? Если кратко, то безопорным состоянием, так сказать, в чистом виде. На орбите невесомость — неотъемлемое свойство и технических конструкций, и людей. В безопорном состоянии оказывается все, что не имеет контакта ни с какими объектами. Именно в таких условиях система управления установки должна обеспечивать человеку шесть степеней свободы, т. е. возможность поступательно перемещаться и вращаться вокруг собственного центра масс. Понятно, как это делается без всяких приспособлений внутри станции: оттолкнулся от ее борта и лети в нужном направлении. А когда опоры нет, каждое движение космонавта вызывает «отдачу» — реактивный вращательный момент. Если при взаимодействии с каким-либо объектом вращательный момент воспримется его конструкцией, то в безопорном пространстве приведет к непреднамеренной переориентации.
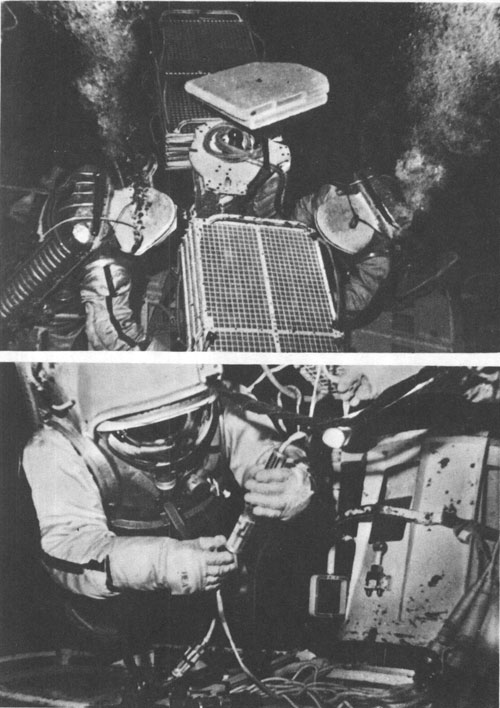
Рис. 7. Испытания установки перемещения космонавта и отработка операций (которые будут выполняться в автономном полете) в гидробассейне
Часто это вовсе не нужно, и тогда вращательный момент приходится рассматривать как возмущение, которое должна «парировать» система ориентации и стабилизации. Но как раз тут на пути решения задачи и появляется упоминавшееся осложнение: единая структура из космонавта и установки не может считаться жестким телом. Нельзя использовать традиционные уравнения механики, поскольку у изучаемого объекта переменные инерционные свойства. В исследованиях обязательно надо учесть то, что любое движение верхних и нижних конечностей меняет не только момент инерции человека, но и положение его центра масс.
Это обстоятельство существенно снижает возможности моделирования на обезвешивающих, использующих разгружающие средства стендах. Дело в том, что на Земле в условиях гравитационного воздействия при смещении центра масс сразу же возникнут опрокидывающие моменты, которые заставят систему принять другое пространственное положение на стенде, и равновесное состояние нарушится. Моделирование в условиях кратковременной невесомости при полете на самолете тоже имеет свои ограничения: малая продолжительность такого состояния и периодическая смена режимов невесомости и перегрузки, искажающие психофизиологический фон испытаний. Есть еще стенды с аэростатическими опорами, где оператор (в скафандре) с установкой парит на воздушной «подушке», как бы скользя над ровной горизонтальной поверхностью, и благодаря ничтожной силе трения может маневрировать с помощью двигателей малой тяги. Но возможности эксперимента ограничены рысканием (вращением вокруг вертикальной оси) и поступательным перемещением (вперед-назад, вправо-влево). Видимо, наиболее корректным способом моделирования остается подводный, когда тяжесть нейтрализуется выталкивающей силой (рис. 7). Опыт работы в космосе показывает, что так безопорное состояние имитируется адекватно.
Пока говорилось о физическом моделировании. Естественно, велика здесь роль и математики.
Математическое описание получается очень сложным даже тогда, когда мы допускаем, что в системе «космонавт—установка» единственный подвижный элемент — человек. Предельно упрощается и биомеханическая модель объекта, который представляется как система нескольких материальных тел (см. рис. 6). Здесь за основное (несущее) тело, вполне естественно, принимаются туловище оператора и сама установка, а за подвижные (носимые) — конечности космонавта и перемещаемые им грузы. Динамику (вращательное движение) несущего тела в безопорном пространстве определяет дифференциальное уравнение, которое устанавливает связь между параметрами вращения и инерционными особенностями объекта (включая переменность инерционных характеристик), соотношением массы всех его элементов, управляющими моментами, обеспечиваемыми исполнительными органами (реактивными двигателями, силовыми гироскопами), внешними возмущениями, возмущающим моментом, который возникает из-за несовпадения положения центра масс с расчетным при включении двигателей поступательного перемещения.

Рис. 8. Установка перемещения космонавта, где управление осуществляется ступней ног. Нажимая педаль, оператор подает команду на включение двигателей: азот поступает по трубопроводу к соплам и выбрасывается из них, обеспечивая реактивную тягу |
Чтобы выполнить детальный анализ математической модели, нужно иметь четкие представления о профессиональной деятельности космонавта. Так, применение скафандра уже меняет подвижность системы: выступая в роли своеобразного фильтра, он, с одной стороны, загрубляющим образом воздействует на кинематику конечностей, а с другой — существенно ограничивает спектр возможных движений.
Сама профессиональная деятельность космонавта с механической точки зрения может быть представлена как смена различных характерных рабочих поз. При переходе от одних поз к другим и будет возникать тот внутренний возмущающий момент, который порождают движения конечностей, в свою очередь продиктованные необходимостью выполнять операции. Чтобы система стабилизации и ориентации могла отвечать на такого рода возмущения, естественно, прежде всего нужно составить полный перечень как самих типичных поз, так и параметров движений конечностей космонавта. На этой основе и синтезируется система управления, которая, «парируя» возмущения, сохраняет пространственное положение космонавта, т. е. осуществляет функцию стабилизации, переориентирует космонавта по выдаваемым им командам и позволяет ему перемещаться в пространстве.
Следует отметить, что математический подход, на который опирается создание индивидуального летательного аппарата, вполне применим при проектировании роботов с дистанционной системой управления с борта пилотируемых космических объектов. Подобные автоматы, оснащенные манипуляторами, могут перемещать и транспортировать разнообразные предметы. Понятно, что чем больше переносимый груз, тем сложнее корректно учесть внутренние возмущающие моменты и смещение общего центра масс как в автоматическом, так и в пилотируемом случае.
Пока мы говорили лишь об одной проблеме. Есть, конечно, и другие. Например, чтобы сделать деятельность космонавта максимально полезной, нужно «освободить» его руки, т. е. дать возможность как-то иначе воздействовать на органы управления. На рис. 8 представлена установка, управление которой осуществляется ступней ноги. Оператор, нажав педаль, подает сигнал на включение микродвигателей.
Другой подход к решению задачи — голосовое управление. Здесь сигналы на включение исполнительных органов поступают от дешифрирующего устройства, воспринимающего команды, которые произносит космонавт вслух.
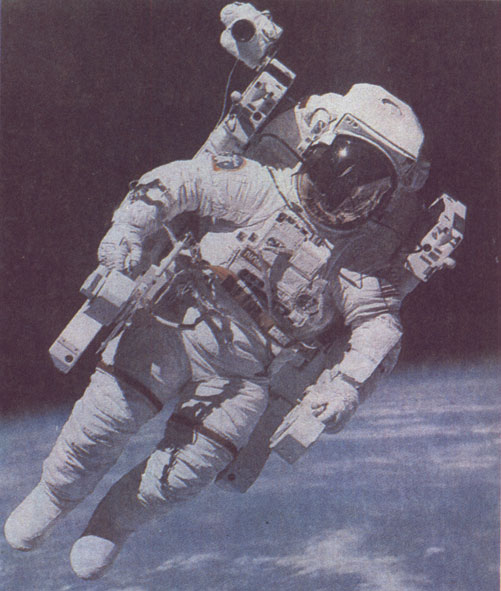
Рис. 9. 1984 г.: во время испытаний индивидуальной установки астронавты Б. Мак-Кандлесс и Р. Стюарт удалялись от многоразового корабля «Челленджер» на расстояние почти 100 м
Но мало создать индивидуальные средства перемещения в космосе — соответствующим образом надо еще подготовить их операторов. Мы уже говорили о том, как испытывается подобная техника на Земле: полеты на самолете, подводная имитация, стенды на аэростатических опорах. Конечно, все это годится для «репетиций» автономного полета человека. Но те же математические идеи, на которых базируется проектирование установок, позволяют решить вопрос о статическом тренажере, где и функционирование основных систем, и кинематика имитируются на моделях.
Что включает подобный тренировочный комплекс?
Начать надо с рабочего места. Тут должен быть скафандр, в котором космонавт выходит в открытый космос и где перепад внешнего и внутреннего давлений такой же, как и в реальном полете. В этом облачении оператор располагается в макете установки, оснащенном всеми полагающимися органами управления и пультом для вывода контрольных параметров.
Затем нужна вычислительная машина, которая моделирует систему управления и исполнительных органов, реакцию чувствительных элементов, динамику орбитального и относительного движения установки и «другого» космического объекта, изменение инерционно-массовых характеристик в зависимости от имитируемых работ.
Необходимо и визуально воспроизвести внешнюю обстановку. Специальные устройства предназначаются для того, чтобы перед глазами космонавта развернуть предельно достоверную картину происходящего: движущийся «другой» объект, его детали, места отхода и причаливания, звездный фон, земную поверхность и горизонт планеты, причем при различных условиях освещенности. Более перспективными выглядят здесь системы, использующие для синтеза изображения машинную графику. Они свободны от многих недостатков и ограничений, которые присущи механическому способу представления (например, объекта сближения и стыковки).
Наконец, требуется блок, который имитировал бы отказы установки, одновременно обеспечивая адекватную реакцию на действия оператора в процессе пилотирования.
И хотя именно благодаря математическому моделированию удается найти оптимальную структуру управления для установки, создать исследовательские стенды и тренажеры, ни оно само, ни какие-либо другие методы имитации (скажем, те физические полунатурные, что уже упоминались) не обеспечивают абсолютной «чистоты» эксперимента. Все равно нельзя обойтись без испытаний непосредственно в космическом полете, в невесомости, в безопорном пространстве. Их можно проводить не только в открытом космосе, но и внутри герметичных отсеков орбитального комплекса.
Каким же опытом мы уже располагаем?
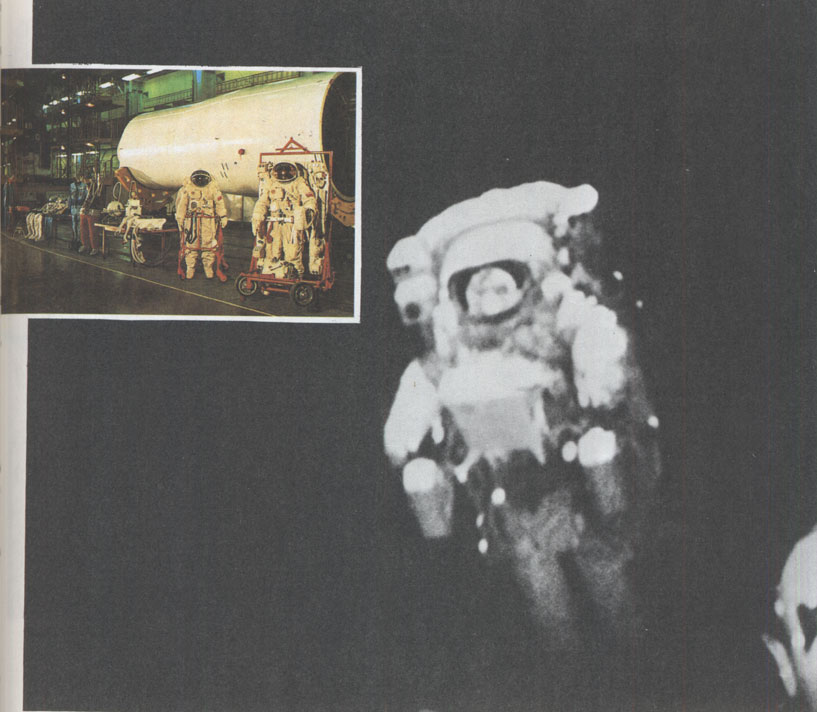
Рис. 10. 1988 г.: на космодроме Байконур президенту Французской Республики Ф. Миттерану были продемонстрированы скафандры с автономными средствами передвижения в открытом космосе
Рис. 11. 1990 г.: А. С. Викторенко в открытом космосе. Летные испытания установки для передвижения космонавта идут нормально (снимок передан по каналу телекосмической связи) |
Американские коллеги в середине 60-х годов опробовали подобный аппарат в рамках программы «Джемини», правда, без особого успеха. Следующий эксперимент был поставлен на орбитальной станции «Скайлэб», запущенной в 1973 г.: астронавты летали на установках внутри нее, благо размеры помещения позволяли это сделать. Модификаций установок было две: одна — можно сказать, классическая, с ручным управлением, другая — с ножным (через специальную педаль). И хотя второй способ освобождал руки для полезной работы, выбрано было все-таки кресло с рукоятками.
Еще через десять лет средства автономного перемещения появились на кораблях «Спейс Шаттл». Первые же шаги оказались весьма впечатляющими: два члена экипажа «Челенджера» удалялись от него на значительные расстояния (до 100 м), причем без страховочного троса (рис. 9). Смело? Да, конечно, но вовсе не безрассудно. Дело в том, что корабль, оборудованный манипулятором, мог «подобрать» астронавта, предварительно сблизившись с ним. Удача окрыляла, и круг операций, где использовалась установка, был расширен. С ее помощью осуществлялись перелеты на спутники, с тем чтобы подготовить их к захвату манипулятором или остановить беспорядочное вращение. Именно таким способом были загружены в отсек полезной нагрузки корабля спутники «Палапа» и «Уестар». После «реставрации» на Земле они были вновь выведены на орбиту. Естественно, не все шло гладко, но это была уже практическая работа.
Наступил февраль 1990 г. Для нас время обычно холодное. Но в этом году была оттепель, туманы, часто, что называется, нелетная погода. А в космосе готовились к качественно новым экспериментам. Станция «Мир» сама стала своеобразным Байконуром, где должен был испытываться собственный пилотируемый спутник.
Уже был обжит второй модуль дооснащения «Квант-2», опробованы новая шлюзовая камера с увеличенным люком, открывающимся наружу, и скафандр с автономной системой жизнеобеспечения. Но главное было впереди — в модуле, в шлюзовой камере, лежала, пока еще как груз, установка для передвижения космонавта; ее чувствительные приборы еще не выдавали команд, а на двигателях ориентации и перемещения еще не открывались клапаны, с тем чтобы струи воздуха дали жизнь этому миниатюрному космическому кораблю (рис. 10).
К новой работе тщательно готовились в космосе и на Земле. За плечами космонавтов многие часы тренировок на специальных стендах.
И вот те два выхода в открытый космос, которые полностью посвящены испытанию автономной системы перемещения в безопорном пространстве (рис. 11). Как ее только ни называли: «кресло», «летающее кресло», «велосипед», «мотоцикл»... Первым опробовал установку А. А. Серебров, вторым А. С. Викторенко. На Земле с волнением наблюдали, как, отпустив поручни причала, космонавт повис около станции, а затем, включив двигатели, стал плавно удаляться от нее. За ним змеей тянулась тонкая нить — страховочный фал. Фал натягивался, извивался, словно на ветру.
Впечатляет картина удалившегося от станции космонавта, как бы растворяющегося в пространстве: с одной стороны внизу — выходной люк, с другой — земной горизонт, и между ними наплывающая фигура в скафандре, все отчетливее ее контуры, руки, шлем...
За то время, что экипаж находился вне корабля (около 9 ч), установка наработала без малого два часа, продемонстрировав большие возможности маневрирования
Космонавты удалялись от станции на сорок метров, проверяли различные режимы ориентации и стабилизации, используя для управления экономичный и форсированный режимы. Плавное, можно сказать величавое, движение сменялось энергичными разворотами. Оба космонавта в один голос отметили «мягкость» управления и достаточную его эффективность. Без особого труда происходило причаливание, хотя много было разговоров о трудности оценки в космосе относительного расстояния. И здесь оказался полезным фал: по его длине определялась дальность. Космонавты научились ее оценивать даже с учетом дуг и петель. Был выполнен и самостоятельный эксперимент по измерению спектроэнергетического распределения вторичного гамма-излучения, возникающего при воздействии галактических и солнечных лучей на материалы конструкции.
На огромном экране Центра управления полетом — кадры, которые передает камера, установленная на системе передвижения. Вид орбитального комплекса грандиозен. Вот батареи, антенны, люки, датчики. Это не просто красивая картина, а уже практическая деятельность космонавтов — осмотр станции.
Пилот, летчик по профессии А. Викторенко не удержался от сравнения: «как полет строем».
Главный конструктор установки говорит о ее прикладных возможностях: надо испытать режим дистанционного управления, ведь в системе можно разместить робота с манипуляторами, можно... Замыслов много.
А. Викторенко отметил, что при движениях рук срабатывает система стабилизации, парируя возникающий момент. Это важное замечание. Ведь сейчас использовались лишь режимы перемещения, ориентации и стабилизации, когда для управления установкой достаточно легких, незначительных движений кисти руки. При активной же работе конечностей возмущения будут гораздо больше, и они должны полностью компенсироваться.
Итак, перспективное средство для автономного перемещения есть. Подобные устройства будут необходимы для создания и эксплуатации крупногабаритных станций типа «Мир», в полетах многоразовых кораблей «Буран», для сборки межпланетных кораблей.
Наш далекий предок Икар, как утверждает древний миф, устремился ввысь на крыльях из перьев и воска и был наказан. Сегодня человек обрел космические крылья и летит над своей планетой.