10 марта. Вашингтон. По сообщению журнала "POPULAR MECHANICS" инженерно-технический персонал космического центра им.Джонсона приступил к разработке небольшого беспилотного модуля "Артемис" для полетов на Луну.
Запускаемый с помощью ракеты-носителя средней грузоподъемности, модуль может нести полезную нагрузку весом до 200 кг, в которую могут входить небольшие телескопы, приборы для проведения геофизических экспериментов и другое оборудование.
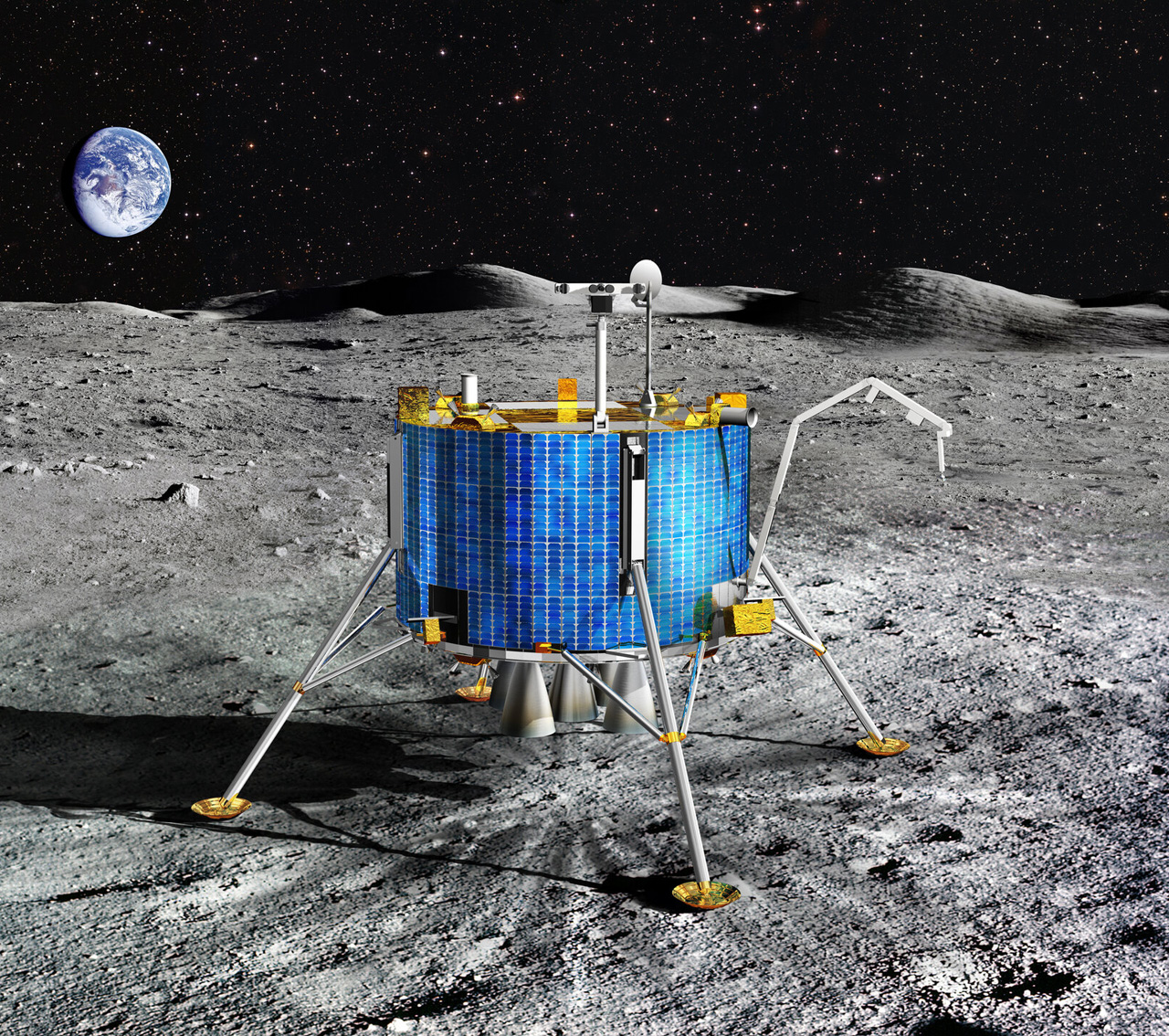
Управление полетом лунного модуля будет осуществляться с помощью бортовых радиолокационных станций, а торможение и мягкое касание поверхности Луны обеспечат тормозные двигатели и посадочные шасси, использующие принцип амортизации.
Полеты модулей по программе "Артемис", первый из которых планируется осуществить в 1996 г., будет предшествовать пилотируемым полетам на Луну, объявленным Президентом Бушем в рамках дальнейшего развития космической программы США. Кроме того, в дальнейшем модули могут быть использованы и для доставки различных грузов на лунные обитаемые станции.
По мнению журнала, реализация программы "Артемис" обойдется НАСА дешевле по сравнению с программой "Аполло".