4.1. Марсианские проекты Франции
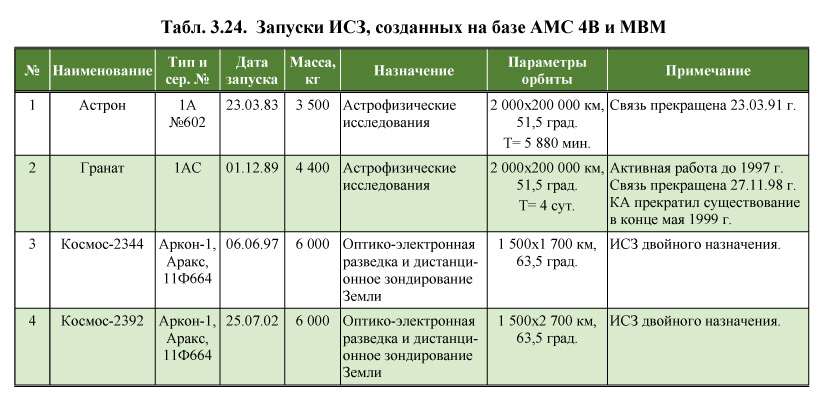
4.1.1. Проект АМС «CNES Orbiter»
Летом 1996 г. NASA предложила Национальному центру космических исследований Франции (CNES) участвовать в программе доставки марсианского грунта на Землю «Mars Sample Return Mission» (MSRM). Франция по этой программе должна была разработать АМС, которая должна была, стартовав в 2005 году, выйти на орбиту спутника Марса, отыскать, сблизиться и захватить капсулы с марсианским грунтом, доставленные туда взлетными ракетами с американских посадочных АМС, и, наконец, доставить марсианский грунт на Землю. Проект АМС получил наименование «CNES Orbiter».
Конструктивно АМС состоит из двигательного модуля, работающего на участке перелета Земля-Марс и во время выхода на орбиту спутника Марса, и основного модуля, обеспечивающего орбитальные маневры при сближении с контейнерами и отлет к Земле.
АМС «CNES Orbiter» должна выйти на орбиту спутника Марса с помощью т.н. аэродинамического захвата. Траектория входа АМС в атмосферу Марса рассчитывается таким образом, что минимальная высота пролета составит 43-45 км от поверхности. АМС будет иметь мощный теплозащитный экран и двигатели управления ориентацией АМС при аэродинамическом торможении. Перегрузки при торможении должны составить 2,4-2,8 g. Потеря скорости при проходе через атмосферу составит около 1 500 м/с, что обеспечит выход АМС на орбиту с высотой апоцентра 1 000-5 000 км. После прохода атмосферы Марса АМС сбрасывает лобовой экран, выдает разгонный импульс для поднятия перицентра орбиты до высоты 200 км - за пределы плотных слоев атмосферы, и сбрасывает двигательный модуль.
Выйдя на околомарсианскую орбиту, АМС начинает поочередное сближение с контейнерами, выведенными на орбиту взлетными ракетами первого и второго американских посадочных комплексов. Выведение АМС на нужную орбиту и сближение до 2 км происходит по указаниям с Земли, а затем в автоматическом режиме под управлением бортового компьютера. АМС использует при сближении лазерный дальномер. Для точного определения орбиты и положения контейнера используются данные других АМС, находящихся на орбите Марса и отслеживающих движение контейнера. После маневрирования, необходимого для сближения с контейнером, АМС захватывает контейнер приемным конусом и помещает его в возвращаемую капсулу. Расчетный срок для сближения и захвата контейнера первого посадочного комплекса составляет около полугода. За это время второй посадочный комплекс, запущенный к Марсу одновременно с АМС «CNES Orbiter», завершает свою работу и выводит на орбиту ИСМ второй контейнер с грунтом. АМС «CNES Orbiter» выполняет захват второго контейнера, на что по плану отводится 4-5 месяцев.
После завершения этапа подбора контейнеров возвращаемый аппарат переходит на траекторию полета к Земле. При сближении с Землей АМС выводит возвращаемую капсулу на траекторию, обеспечивающую заданные условия входа в атмосферу, отделяет капсулу, и переходит на гелиоцентрическую орбиту, исключающую дальнейшую встречу с Землей. Капсула входит в атмосферу со скоростью 11,5 км/с, тормозится в атмосфере и совершает жесткую посадку (без парашютов) в штате Юта. Корпус капсулы выполняется таким образом, чтобы исключить повреждение капсул при приземлении. Капсулы рассчитаны на действие перегрузок до 200 g.
Корпус АМС без лобового экрана имеет диаметр и длину около 3 м, диаметр лобового экрана - 3,65 м. Двигательная установка АМС имеет запас характеристической скорости 3 500 м/с. Энергопитание аппаратуры АМС обеспечивается солнечными батареями и литий-ионными аккумуляторами.
Масса АМС АМС «CNES Orbiter» - 2 700 кг, в т.ч. 600 кг - возвращаемый аппарат и 300-400 кг - лобовой экран.
Запуск АМС должен осуществляться РН Ariane 5 с криогенным разгонным блоком ESC-A либо американской РН Delta 4 Heavy. Одновременно этой же РН должен быть запущен второй американский посадочный комплекс. Общая масса двух комплексов - 5,2 т.
Запуск АМС «CNES Orbiter» по первоначальной программе планировался на 2005 год. В 2000 году, после пересмотра NASA сроков программы MSRM, стало очевидно, что старт АМС «CNES Orbiter» сможет состояться не ранее 2011 года.
4.1.2. Программа «Mars PREMIER»
После неудач двух американских миссий 1998 года - «Mars Climate Orbiter» и «Mars Polar Lander», - состоялся пересмотр марсианской программы США. В октябре 2000 года NASA объявила о переносе сроков доставки марсианского грунта, после чего CNES начала работу над собственным марсианским проектом, названным «Mars PREMIER» (Programme de Retour d'Echantillions Martiens et d'Installation d'Experiences en Reseau - Программа доставки марсианских образцов и организация сетевых экспериментов).
Проект «Mars PREMIER» предусматривал несколько этапов реализации программы по доставке марсианского грунта:
- запуск нескольких экспериментальных аппаратов для отработки технологий;
- запуск прототипа орбитальной АМС;
- запуск посадочно-взлетной марсианской АМС «CNES Lander»;
- запуск АМС для доставки марсианского грунта «CNES Orbiter».
В 2002 году рассматривался вопрос об объединении задач проекта «Mars PREMIER» с предложенной к этому моменту миссией ESA «ExoMars» (п. 5.2.6.4), однако от этого объединения решено было отказаться, и некоторое время проекты разрабатывались параллельно.
4.1.2.1. Предварительно-отработочные миссии
Ниже описаны некоторые проекты предварительно-отработочных миссий в интересах программы «Mars PREMIER».
В запуске КА «ERVC» (Earth Re-entry Vehicle/Capsule - возвращение капсулы на Землю) было намечено отработать технологию возвращения со второй космической скоростью капсулы с грунтом. Экспериментальная капсула «ERVC» должна была быть выведена на высокоэллиптическую орбиту ИСЗ, а затем доразогнана для достижения необходимой скорости входа в атмосферу Земли.
Задачей миссии «Mars Aerocapture Demostrator» являлась отработка технологии аэродинамического захвата при выходе АМС на околомарсианскую орбиту. Такой способ торможения требует высокой точности при входе в марсианскую атмосферу, точного знания параметров атмосферы на момент входа, а также отработанной системы управления входом. Аэродинамический захват планировалось применять при полетах АМС «CNES Orbiter» и, возможно, «CNES Lander».
На начальном этапе разработки проекта АМС для доставки на Землю марсианского грунта CNES предполагала также разработать «микрокосмический аппарат» (МКА) массой менее 200 кг, который должен был бы запускаться РН Arian 5 одновременно с АМС «CNES Orbiter». МКА предполагалось выводить на орбиту, переходную к геосинхронной, с которой АМС должна была, используя собственные ДУ и гравитационные маневры у Луны и Земли, перейти на траекторию полета к Марсу.
4.1.2.2. АМС «Mars 2007»
По этому проекту должна была быть разработана и запущена к Марсу в 2007 году АМС, являющаяся прототипом орбитальной АМС «CNES Orbiter».
АМС представляет собой комплекс, состоящий из орбитального модуля «Mars 2007 Orbiter» и четырех посадочных модулей «NetLander».
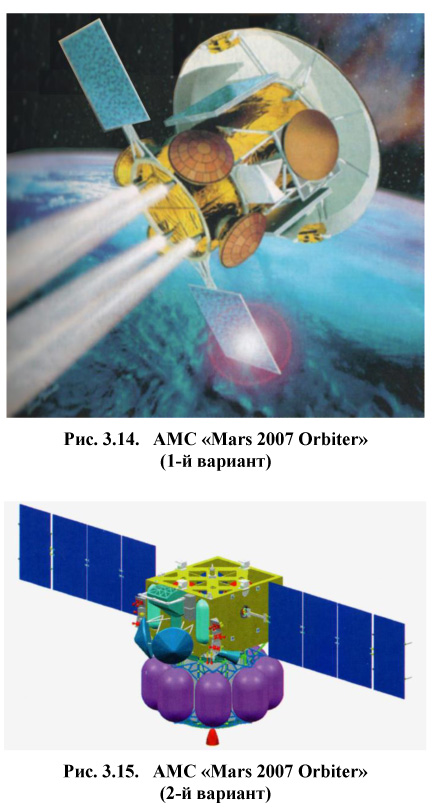 4.1.2.2.1. АМС «Mars 2007 Orbiter»
4.1.2.2.1. АМС «Mars 2007 Orbiter»На АМС «Mars 2007 Orbiter» возлагались следующие задачи:
- отработка поиска, сближения и захвата контейнеров с грунтом на орбите спутника Марса;
- доставка посадочных модулей «NetLander»;
- проведение попутных научных наблюдений;
- ретрансляция данных, передаваемых различными АМС с поверхности Марса.
По первоначальному проекту АМС «Mars 2007 Orbiter», называемая также «MO-07», представляла собой прототип орбитальной АМС «CNES Orbiter». Выход на орбиту спутника Марса планировалось выполнять путем торможения АМС в верхних слоях атмосферы Марса («аэродинамический захват»), для чего АМС должна была нести специальный защитный лобовой экран.
Проведенные оценки риска при выполнении «аэродинамического захвата» вынудили специалистов CNES сначала продублировать способ выхода на орбиту спутника Марса установкой ТДУ, а затем и вообще отказаться в проекте «Mars 2007 Orbiter» от «аэродинамического захвата». В результате конструкция АМС «MO-07» была переработана полностью.
По новому варианту проекта АМС «Mars 2007 Orbiter» состояла из основного блока, несущего двигательную установку, и блока-носителя посадочных модулей «NetLander».
Проведение научных наблюдений с борта АМС на этапе полета к Марсу было отменено.
Программа полета АМС «Mars 2007 Orbiter» выглядела следующим образом. За 38 суток до сближения с Марсом начинается процедура последовательного нацеливания и отделения посадочных модулей. Последний, четвертый модуль отделяется за 8 суток до подлета к Марсу. После этого блок-носитель модулей сбрасывается, а АМС выполняет ориентирование для начала торможения с помощью основной двигательной установки. АМС должна выйти на промежуточную эллиптическую орбиту спутника Марса, а спустя две недели - на рабочую орбиту, близкую к круговой, высотой 500 км и наклонением 93,2°.
После выхода на рабочую орбиту начинается отработка технологии захвата контейнеров с грунтом. От АМС отделяется имитатор контейнера OS (Orbiting Sample) с радиопередатчиком. Диаметр имитатора - 16 см. После удаления имитатора на некоторое расстояние начинается процесс автоматического поиска, расчета траекторных маневров, сближения и захвата имитатора. Отработка технологии захвата будет продолжаться 11 месяцев. Завершением работы с имитатором контейнера будет его окончательное отделение и проверка работы средств обнаружения и слежения на большом расстоянии.
На следующем этапе работы АМС «MO-07» проводит научные исследования с орбиты высотой 350 км. Этот этап продлится 1 марсианский год. Затем АМС переводится на орбиту 170 х 1 000 км.
Масса АМС «MO-07» должна была составить 3 020 кг, в том числе 1 680 кг топлива, 4 модуля «NetLander» с переходными блоками - 340 кг, оборудование для отработки захвата контейнеров - 80 кг, научная аппаратура с интерфейсами - 50 кг.
Запуск АМС рассчитывался на РН Ariane 5 EPS-V.
Старт АМС «MO-07» был запланирован на 11.09.07 г., а выход на орбиту спутника Марса - в июле-сентябре 2008 г.
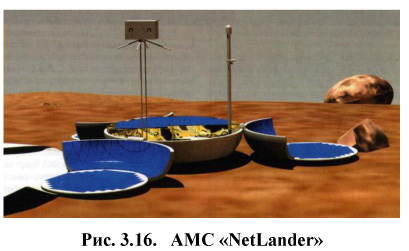 4.1.2.2.2. Малые посадочные модули «NetLander»
4.1.2.2.2. Малые посадочные модули «NetLander»Малые геофизические (ареофизические) АМС «NetLander» разрабатывались для изучения внутреннего строения Марса и эволюции его атмосферы и климата. Сеть из нескольких АМС должна была позволить обнаружить и локализовать очаги марсотрясений, а по распространению ударных волн исследовать внутреннее строение Марса.
Впервые предложение о создании на Марсе сети сейсмических, метеорологических и геодезических станций под названием «Marsnet» прозвучало в ESA в 1993 году. В 1996 году был рассмотрен схожий проект «InterMarsnet». В 1997 году рассматривалось предложение об установке четырех посадочных модулей «InterMarsnet» на АМС «Mars Express», но резерва массы было недостаточно, и предложение было отклонено. АМС «NetLander» являлись, по сути, эволюционным завершением проектов «Marsnet» и «InterMarsnet». В процессе работ по проекту «Mars PREMIER» (доставка марсианского грунта) было принято решение о размещении четырех АМС «NetLander» на орбитальном блоке АМС «MO-07».
На АМС «NetLander» планировалось установить следующее научное оборудование:
- двухосный сейсмометр;
- трехосный сейсмометр короткопериодических колебаний;
- трехосный магнитометр;
- метеостанция с датчиками температуры, давления, скорости ветра относительной влажности и оптической плотности атмосферы;
- датчик электрического поля;
- радиолокатор подпочвенного зондирования;
- панорамная телекамера.
Диаметр корпуса АМС до раскрытия в рабочее положение - 0,47 м. Масса АМС «NetLander» при отделении от орбитального блока 76,5 кг, в состоянии после посадки - 25 кг, в т.ч. 4,5 кг научной аппаратуры.
АМС «NetLander» должны были отделиться от орбитального модуля за 38-8 дней до сближения с Марсом, при этом для них выбирались такие траектории, чтобы их посадка произошла в районах, отдаленных один от другого на 2 000-3 000 км. Одна АМС должна была совершить посадку в Южном полушарии в районе бассейна Эллада, три других - вокруг вулканического комплекса Фарсида.
Расчетная программа посадки АМС «NetLander» выглядела так: АМС после отделения от орбитального блока тормозится в атмосфере Марса с помощью лобового теплозащитного экрана диаметром 90 см, затем совершает спуск на парашюте и, наконец, выполняет мягкую посадку с помощью надувных баллонов, как это было сделано при посадке АМС «Mars Pathfinder». Диаметр корпуса АМС до раскрытия в рабочее положение - 0,47 м. После посадки АМС раскрывает панели солнечных батарей, обеспечивая одновременно принятие правильного положения корпуса, выдвигает штанги с антенной, телекамерой и метеодатчиками, а также переносит на грунт сейсмометры.
4.1.2.3. АМС «CNES Lander»
Для реализации чисто французского варианта программы доставки марсианского грунта CNES должна была самостоятельно разработать и построить посадочно-взлетную АМС «CNES Lander». АМС «CNES Orbiter» оставалась практически такой же, как для американо-французского проекта (п. 4.1.1).
АМС «CNES Lander» должна была включать посадочную систему, грунтозаборное устройство, взлетную ракету и возвращаемую капсулу. Считалось, что для первой экспедиции не обязательна высокая точность посадки в намеченную точку. Взлетная ракета должна была доставить контейнер с образцом грунта на круговую орбиту высотой 150 км, где этот контейнер должен быть подобран АМС «CNES Orbiter» и доставлен затем на Землю.
Намечалось осуществить запуск АМС «CNES Lander» в 2011 году, а АМС «CNES Orbiter» - в 2013 году.
5.2.2. АМС «Mars Express»/«Beagle 2»
Комплекс АМС «Mars Express» / «Beagle 2» разработан ESA (орбитальная АМС «Mars Express») и Британским Космическим Агентством (посадочный модуль «Beagle 2») для исследования Марса в астрономическом «окне» 2003 года.
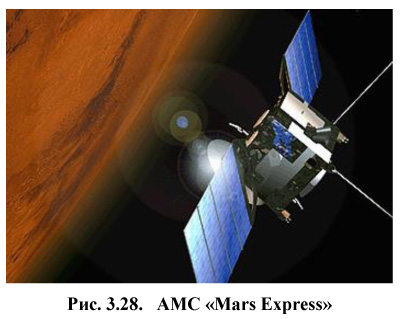 5.2.2.1. АМС «Mars Express»
5.2.2.1. АМС «Mars Express»Основные научные задачи орбитальной АМС:
- проведение глобальной съемки Марса с высоким разрешением (10 м);
- составление минералогической карты с разрешением 100 м;
- картирование атмосферного состава;
- изучение подповерхностной структуры грунта;
- изучение глобальной циркуляции атмосферы;
- исследование взаимодействия атмосферы и поверхности Марса;
- исследование взаимодействия атмосферы и межпланетной среды;
- доставка на Марс посадочного модуля «Beagle 2».
Рассматривалась возможность доставки на Марс с помощью АМС «Mars Express» четырех малых посадочных модулей «InterMarsnet» с сейсмическими и метеорологическим датчиками, но резерва массы для этого оказалось недостаточно.
Орбитальная АМС имеет форму параллелепипеда со сторонами 1,5 х 1,8 х 1,4 м. К боковым сторонам корпуса АМС смонтированы две панели солнечных батарей площадью 11,42 м2. Поперечный размер АМС по концам солнечных батарей составляет 12 м. На корпусе АМС смонтированы также остронаправленная антенна диаметром 1,8 м, две штанги дипольной антенны длиной по 20 м и всенаправленная антенна длиной 4 м. На одной из сторон закреплен посадочный модуль «Beagle 2».
Для энергопитания аппаратуры во время нахождения АМС в тени Марса используются литиево-ионные аккумуляторы.
Основная двигательная установка работает на двухкомпонентном топливе и имеет тягу 40,8 кг. Для ориентации АМС используются 8 вспомогательных двигателей тягой по 1 кг, разнесенных по вершинам корпуса.
Состав научной аппаратуры орбитальной АМС:
- HRSC - стереоскопическая камера высокого разрешения;
- OMEGA - спектрометр, работающий в видимом и инфракрасном диапазонах;
- PFS - инфракрасный спектрометр;
- SPICAM - ультрафиолетовый спектрометр;
- ASPERA - датчики нейтральных и заряженных частиц;
- MARSIS - длинноволновый радар.
Масса АМС 1 223 кг, в том числе 116 кг научных приборов, 457 кг топлива, 60 кг - посадочный модуль.
Запуск АМС произведен 02.06.03 года с помощью РН Союз-ФГ-Фрегат. 19.12.03 года произошло отделение модуля «Beagle 2», АМС в это время двигалась по траектории, нацеленной на точку входа в атмосферу Марса- 20.12.03 года была произведена коррекция траектории АМС «Mars Express» с целью выведения на орбиту спутника Марса.
25.12.03 года было произведено включение основной ДУ, и АМС «Mars Express» вышла на орбиту ИСМ с параметрами 250 х 150 000 км, наклонение 25°. 30.12.03 года АМС была переведена на орбиту высотой 258 х 11 560 км, наклонением 86,3°, и периодом обращения 7,5 ч. Через 440 дней работы предполагалось перевести АМС на орбиту 298 х 10 107 км с периодом обращения 6,7 ч.
Расчетное время работы АМС «Mars Express» на орбите ИСМ - не менее 1 марсианского года (687 земных суток). На май 2020 года АМС продолжала исследования Марса.
С помощью научных приборов, установленных на АМС, получены важнейшие результаты, касающиеся геохимии и атмосферной химии Марса. Данные о распределении по поверхности планеты гидратированных минералов помогут установить, когда закончился период «влажного климата», благоприятного для возможного зарождения жизни на Марсе. АМС «Mars Express» сделала открытие так называемых «авроральных сияний» в атмосфере, которые в отсутствии мощного магнитного поля, как у Земли, происходят не в полярных областях.
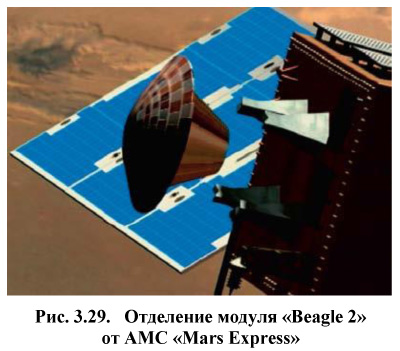  |
Посадочный модуль «Beagle 2» во время перелета был закреплен на верхней части корпуса АМС. Посадка модуля выполнялась по той же схеме, что и у АМС «Mars Pathfinder Lander» - с помощью парашютов и надувных газовых баллонов. Расчетное место посадки - равнина Исиды, 10,6° с.ш., 270° з.д. Информация посадочного модуля должна была ретранслироваться орбитальными АМС «Mars Express» или «2001 Mars Odissey».
Научные задачи посадочного модуля
- изучение геологии, минералогии и геохимии места посадки;
- исследование физических свойств атмосферы и поверхностных слоев;
- сбор данных о марсианских погоде и климате;
- поиск признаков жизни.
Перечень научных приборов модуля «Beagle 2»:
- цветные стереокамеры;
- черно-белая видеокамера;
- видеокамера высокого разрешения;
- масс-спектрографический анализатор;
- минералогический анализатор;
- газоанализатор;
- метеокомплекс;
- манипулятор;
- бур и приемник образцов грунта;
- мини-марсоход.
 Масса «Beagle 2» в составе АМС 65 кг, на поверхности Марса - 30 кг, в т.ч. научного оборудования - 6 кг.
Масса «Beagle 2» в составе АМС 65 кг, на поверхности Марса - 30 кг, в т.ч. научного оборудования - 6 кг.Мини-марсоход российской разработки «Mole» («Крот») имел длину 12 см и мог закапываться в грунт на глубину до 2 м. Мини-марсоход был помещен в пусковой тубус, который после посадки и осмотра окружающей местности должен был быть направлен в сторону выбранного специалистами камня. «Mole», пользуясь тубусом, как направляющей, переместится к выбранному камню и зароется в грунт под камень. После взятия образцов грунта «Mole» будет втянут в приемное устройство посадочного модуля для перегружения грунта в приемный блок модуля. Эта операция может быть повторена многократно.
Энергопитание аппаратуры посадочного модуля осуществляется от солнечных батарей, которые расположены на дисковых панелях, раскрываемых после посадки модуля, и от аккумуляторов.
Расчетное время работы АМС «Beagle 2» на поверхности Марса не менее 1 марсианского года, хотя основная программа работы была рассчитана на 6 месяцев.
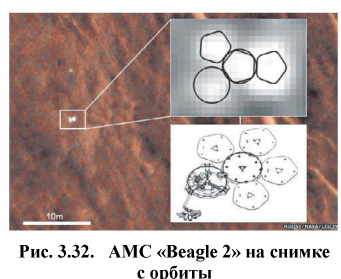
«Beagle 2» достиг поверхности Марса 25.12.03 года, но сигнала о посадке и начале работы от него не поступило. После нескольких дней, в течение которых специалисты ESA пытались получить какой- либо отклик от модуля «Beagle 2», было официально объявлено о потере посадочного модуля.
Фотоснимки, сделанные с орбиты в 2013-2014 годах американской АМС «MRO» (рис. 3.32), дают основания предполагать, что при посадке в результате удара произошло деформирование корпуса АМС, которое не позволило раскрыться двум из четырех дисковых панелей солнечных батарей. Антенна, через которую должна была поддерживаться радиосвязь с орбитальным аппаратом, была расположена под нераскрывшимися панелями.
Руководители программы «Beagle 2» готовили предложения по запуску в 2007 году нового посадочного аппарата «Beagle 3», но финансирование на этот проект не было выделено.
5.2.5. Проект «MASTER»
Проект, предусматривающий запуск модифицированной АМС «Mars Express» для пролета Марса и последующего выхода в пояс астероидов (МASTER = Mars + ACTERoids). Для исследования одного или нескольких астероидов, с которыми будет выполнено сближение, АМС предлагалось оснастить научными приборами, разработанными по проектам Rosetta и SMART-1. Запуск мог быть осуществлен в 2005, 2007 или 2009 году. Проект был предложен в начале 2000 г. на конкурс «гибких» миссий ESA.
2.5. Исследования Меркурия
5.4.2. Проект «BepiColombo»
«BepiColombo» - проект ESA по исследованию Меркурия с помощью АМС, первоначально называвшийся «Mercury Orbiter».
Проект в 1999 году был переименован назван в честь Джузеппе Коломбо (Giusseppe /Bepi/ Colombo), выдающегося итальянского ученого (1920-1984).
5.4.2.1. Первоначальный проект «Mercury Orbiter»
Начальный проект был предложен в 1993 году под названием «Mercury Orbiter». Основная задача АМС - фотосъемка всей поверхности Меркурия.
АМС должна была иметь следующую научную аппаратуру:
- мультиспектральная камера;
- гамма-спектрометр;
- рентгеновский спектрометр;
- магнитометр;
- анализаторы ионов и электронов;
- аппаратура регистрации электрических и магнитных полей и волн;
- ионная пушка для управления потенциалом КА.
Масса АМС при старте - 1 617 кг, сухая масса - 626 кг, в т.ч. масса научной аппаратуры - 50 кг.
Запуск АМС «Mercury Orbiter» должен был производиться РН Ariane 5. После старта в июле 2004 года АМС должна была совершить два гравитационных маневра при пролете Венеры и два - при пролете Меркурия. В апреле 2008 года АМС должна была выйти на полярную орбиту спутника Меркурия высотой 400 х 16 800 км с периодом 13,45 ч и перицентром над 30° с.ш. Расчетная продолжительность работы АМС на орбите - 9 месяцев.
5.4.2.2. Проект «Mercury Orbiter» 1997 года
В 1997 году проект «Mercury Orbiter» был пересмотрен с целью сокращения сроков перелета. Было предложено использовать электрореактивные двигатели, обеспечивающие перелет за более короткий срок и позволяющие вывести АМС на круговую орбиту спутника Меркурия высотой 100 км без гравитационных маневров. Рассматривалось два варианта ДУ, обеспечивающие различные параметры АМС и времени полета:
Вариант 1: тяга ДУ - 0,02 кгс, импульс 3 000 с; длительность перелета 2,7 года; доставляемая масса АМС - 912 кг;
Вариант 2: тяга ДУ - 0,027 кгс, импульс 1 600 с; длительность перелета 1,4 года; доставляемая масса АМС - 644 кг;
АМС должна была иметь стартовую массу 2 000 кг. Запуск по-прежнему рассчитывался на РН Ariane 5, но уже в качестве сопутствующей нагрузки при выведении связного ИСЗ на геопереходную орбиту. После изучения возможных схем полета было вновь решено использовать гравитационные маневры у Венеры и Меркурия.
АМС «Mercury Orbiter» должна была состоять из трех модулей:
- орбитальный аппарат (Planetary Orbiter, PO) для исследования планеты с полярной орбиты. Он должен быть оснащен двумя камерами и примерно шестью другими приборами дистанционного зондирования. Расчетное время работы на орбите - 1 год.
В процессе проработки проект подвергся дальнейшим изменениям и уточнениям.
 5.4.2.3. Проект «BepiColombo» 1999 года
5.4.2.3. Проект «BepiColombo» 1999 годаВ апреле 1999 года проект был полностью переработан и получил название «BepiColombo».
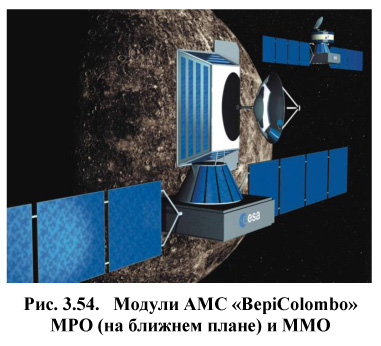
В соответствии с уточненным проектом АМС, как и в предыдущем варианте «Mercury Orbiter», должна была представлять собой комплекс из трех модулей:
- MPO (Mercury Planetary Orbiter) - модуль для проведения глобальных научных исследований Меркурия;
- MSE (Mercury Surface Element) - посадочный модуль для проведения физических, оптических, химических и минералогических исследований на поверхности Меркурия;
- MMO (Mercury Magnitospheric Orbiter) - модуль для проведения исследования электромагнитных полей, волн и частиц на эллиптической орбите спутника Меркурия.
Основные решаемые задачи:
- всестороннее исследование Меркурия и окружающего пространства;
- эксперименты по проверке общей теории относительности
В апреле 1999 года проект был полностью переработан и получил название «BepiColombo».
В соответствии с уточненным проектом АМС, как и в предыдущем варианте «Mercury Orbiter», должна была представлять собой комплекс из трех модулей:
- MPO (Mercury Planetary Orbiter) - модуль для проведения глобальных научных исследований Меркурия;
- MSE (Mercury Surface Element) - посадочный модуль для проведения физических, оптических, химических и минералогических исследований на поверхности Меркурия;
- MMO (Mercury Magnitospheric Orbiter) - модуль для проведения исследования электромагнитных полей, волн и частиц на эллиптической орбите спутника Меркурия.
Основные решаемые задачи:
- всестороннее исследование Меркурия и окружающего пространства;
- эксперименты по проверке общей теории относительности;
- обнаружение астероидов, движущихся по траекториям, близко подходящим к Земле.
Для запуска модулей на траекторию полета к Меркурию используются две РН «Союз-Фрегат». Первая выводит модуль MPO, вторая - модули MMO и MSE. Разгон модулей по траектории полета осуществляется с помощью электрореактивных двигателей, установленных на орбитальных модулях MPO и MMO, а также с использованием гравитационных полей Луны, Венеры и собственно Меркурия. Электроэнергия для работы ЭРД обеспечивается солнечными батареями.
Конструктивно каждый модуль должен состоять из основного блока, блока электрореактивных двигателей (SEPM - Solar-Electric Propulsion Module) и блока химических двигателей (CPM - Chemical Propulsion Module). Блоки SEPM и CPM одинаковы для обоих модулей, разница состоит только в количестве заправляемого топлива.
Основной блок модуля MPO выполняется в виде плоской призмы со скошенными боковыми гранями. Модуль имеет трехосную стабилизацию, солнечные батареи, размещенные на боковых гранях, и остронаправленную антенну для передачи информации на Землю. MPO защищен высокоэффективной термоизоляцией и специальным экраном от инфракрасного излучения как от Солнца, так и со стороны Меркурия. Состав научного оборудования модуля MPO:
- широкоугольная телекамера;
- узкоугольная телекамера;
- инфракрасный спектрометр;
- ультрафиолетовый спектрометр;
- гамма-спектрометр;
- рентгеновский спектрометр;
- нейтронный спектрометр;
- лазерный высотомер;
- телескоп и система обнаружения движущихся объектов.
 Масса MPO - 357 кг. Расчетное время работы модуля на орбите спутника Меркурия - 1 год.
Масса MPO - 357 кг. Расчетное время работы модуля на орбите спутника Меркурия - 1 год.Магнитосферный модуль MMO имеет форму плоского цилиндра, стабилизируемого вращением со скоростью 15 об/мин. Ось вращения направлена перпендикулярно экватору Меркурия. Днища цилиндрического корпуса играют роль радиаторов для отвода избыточно тепла. Боковая поверхность снаружи покрыта элементами солнечной батареи, а изнутри термоизолирована.
Научное оборудование модуля MMO:
- магнитометры;
- детекторы заряженных частиц;
- эмиттер положительных ионов;
- телевизионная система;
- детектор электромагнитных излучений.
Масса модуля MMO - 165 кг. Расчетное время работы на орбите Меркурия - свыше 1 года.
В состав блока SEPM будут входить три электрореактивных двигателя, работающие на ксеноне, и две солнечные батареи общей площадью 33 м2. Тяга ЭРД должна составлять от 0,017 кгс до 0,034 кгс. ЭРД предназначены для выполнения медленных продолжительных маневров. Масса незаправленного блока SEPM модуля MPO - 365 кг. Запас ксенона для модуля MPO - 230 кг, для модуля MMO - 238 кг.
В блоке CPM будут установлены 8 двигателей ориентации тягой по 2 кг и один маневровый ЖРД, имеющий тягу 408 кг. Все ЖРД работают на двухкомпонентном топливе - монометилгидразин и тетраоксид азота. Сухая масса блока - 71 кг. Запас топлива для модуля MPO - 156 кг, для модуля MMO - 334 кг.
Полная проектная масса модуля MPO - 1 229 кг, модуля MMO - около 1 200 кг.
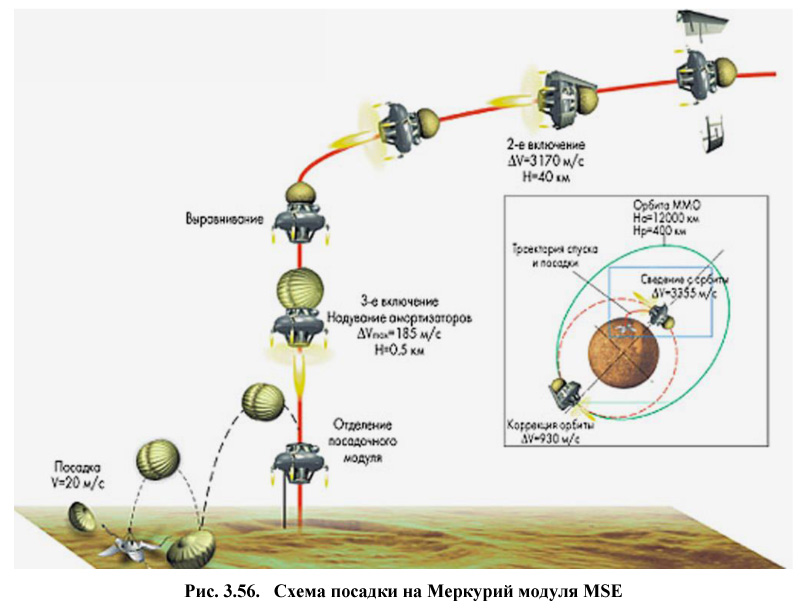
Посадочный модуль MSE состоит из посадочного аппарата, защищаемого надувными амортизаторами, и тормозной двигательной установки тягой 408 кгс. Во время полета от Земли к Меркурию MSE должен был быть присоединен к модулю MMO. После отделения от MMO посадочный модуль выходит на орбиту с минимальной высотой 10 км с помощью своей ТДУ. Последующее торможение переводит модуль на траекторию снижения. На высоте около 500 м выполняется наддув защитных амортизаторов, а на высоте 120 м ТДУ выключается и отбрасывается.
Посадочный аппарат падает на поверхность Меркурия со скоростью касания около 20 м/с. После успокоения надувные амортизаторы отделяются, и посадочный аппарат приступает к выполнению программы. Расчетное место посадки - около терминатора на широте 85°.
Состав научных приборов посадочного аппарата:
- посадочная телекамера;
- обзорная телекамера;
- альфа/рентгеновский спектрометр;
- магнитометр;
- сейсмометр;
- пенетратор;
- микро-ровер;
- приборы для измерения тепловых потоков и физических свойств окружающей среды.
Масса научных приборов 7 кг.
Получаемая информация должна была собираться в бортовом накопителе, а затем транслироваться на модуль MPO или MMO. Энергопитание бортовой аппаратуры должно было обеспечиваться химической батареей.
Масса посадочного аппарата - 44 кг. Расчетный срок работы около 1 недели.
Старт комплекса «BepiColombo» планировалось произвести в августе 2009 года.
В процессе работы над проектом вносилось предложение вместо модуля мягкой посадки MSE включить в состав комплекса два пенетратора, сбрасываемых с околомеркурианской орбиты.
Конструктивно АМС «BepiColombo» представляет собой на этапе выведения и перелета к Меркурию единый комплекс MCS (Mercury Composite Spacecraft), который состоит из четырех частей:
- орбитальный аппарат MMO (Mercury Magnitospheric Orbiter, JAXA);
- солнцезащитный экран MOSIF (MMO Sunshield and Interface Structure, ESA);
- орбитальный аппарат MPO (Mercury Planetary Orbiter, ESA);
- перелетный модуль MTM (Mercury Transfer Module, ESA).
В перелетном модуле смонтированы двигательные установки с запасами топлива: маршевый двухкомпонентный ЖРД тягой 45,9 кгс и четыре электрореактивных двигателя тягой по 15 гс. Для ориентации и проведения коррекций в модуле имеется 8 ЖРД тягой по 2,2 кгс и 16 ЖРД тягой по 1,0 кгс. Запас топлива для ЭРД в MTM составляет 400 кг ксенона.
Разработку модуля MMO выполняет Япония, модули MPO, MTM и MOSIF изготавливает ESA. Головным подрядчиком по АМС в целом выбрана компания Astrium GmbH (Фридрихсхафен, ФРГ).
Масса АМС составляет 2 370 кг, в т.ч. MPO - около 500 кг, MMO - 250 кг.
Основной научной задачи проекта «BepiColombo» является изучение Меркурия, а именно:
- изучение происхождения и эволюции;
- исследование формы, внутреннего строения, геологической структуры;
- исследование состава и динамики экзосферы;
- изучение структуры магнитосферы;
- выяснение состава и происхождения отложений в полярных областях;
- наблюдение эффектов общей теории относительности.
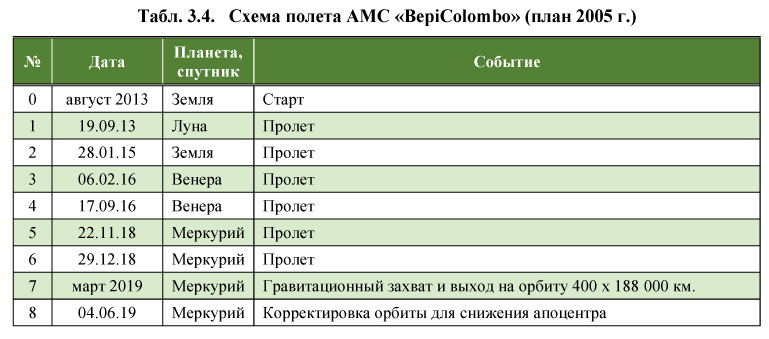
Схема полета к Меркурию выглядит следующим образом. Комплекс MCS (т.е. «сборная» АМС «BepiColombo») в августе 2013 года выводится с помощью РН «Союз-2.1Б» и РБ «Фрегат» на геопереходную орбиту с апогеем 35 800 км. Затем с помощью маршевой ДУ перелетного модуля комплекс переводится на промежуточную высокоэллиптическую орбиту, апогей которой поднимается несколькими импульсами с целью пролета около Луны. 19.09.13 г. АМС совершает гравитационный маневр при пролете Луны и переходит на межпланетную траекторию. Запланировано несколько гравитационных маневров около Венеры, Земли и Меркурия для обеспечения условий выхода на орбиту спутника Меркурия. С помощью рассчитанных маневров около точек либрации L1 и L2 АМС будет подходить к Меркурию с малой относительностью скоростью и будет захвачена гравитационным полем Меркурия без тормозного импульса. АМС выйдет на орбиту высотой 400 х 188 000 км, но уже на первом витке в перицентре орбиты будет выдан небольшой импульс для понижения высоты апоцентра. Затем будет выполнено еще три маневра снижения орбиты, после чего будет достигнута рабочая орбита модуля MMO - 400 х 11 824 км, - который будет отделен от комплекса, сбросит солнцезащитный экран MOSIF и приступит к выполнению научной программы. Комплекс продолжит снижение орбиты, закончив маневры в июле 2019 года. После этого будет произведен сброс перелетного модуля MTM, а модуль MPO приступит к работе на орбите 400 х 1 508 км. Орбиты модулей MMO и MPO выбраны таким образом, что периоды обращения MMO - 9,2 ч, - и MPO - 2,3 ч, - соотносятся как 4:1, что означает, что относительные положения модулей будут регулярно повторяться.
Расчетный срок модулей на орбите Меркурия составляет четыре меркурианских года (один земной год).
5.6.4. Программа исследования Солнца
5.6.4.1. Проект «Interhelios»
Российско-германский проект «Interhelios» разрабатывался в конце 1990-х годов и к 2005 году трансформировался в чисто российский проект «Интергелиозонд».
Проект предусматривал создание АМС для исследования Солнца с расстояния 12-30 солнечных радиусов. АМС должна была быть выведена на рабочую гелиоцентрическую орбиту путем многократного использования гравитационных маневров при пролете Венеры.
5.6.4.2. Программа «Solar-NET»
В марте 1998 года состоялся европейский симпозиум по проблемам солнечных исследований, организованный ESA. На симпозиуме было обсуждено несколько программ исследования Солнца, в частности, «Stereo», «Solar-NET», «Solar Probe», «Solar Orbiter» и «Рolar Orbiter». Программа «Solar-NET» предусматривала детальное исследование солнечных бурь и солнечной короны с использованием комбинаций трех телескопов и интерферометра, что позволило бы получать изображения с разрешением в 40 раз выше, чем доступные ранее. В остальных программах предлагалось проводить исследования Солнца с использованием АМС.
5.6.4.3. Программа STIP
Программа STIP была предложена в конце 1990-х годов, как объединяющая усилия ученых США, Европы и России. Эта программа включала три проекта, образующие аббревиатуру STIP: «STereo» + «Interhelios» + «solar Probe»). Измерения и наблюдения одновременно с нескольких космических аппаратов позволили бы получить достоверную картину о состоянии околосолнечного пространства, о физических процессах, ответственных за нагрев солнечной короны и ускорение солнечного ветра.
5.6.4.4. Проект «Stereo»
Проект «Stereo» был предложен в конце 1990-х годов. Первоначально проект предусматривал выведение нескольких КА на гелиоцентрические орбиты. Проведенные с их помощью наблюдения дали бы возможность получать объемную картину процессов, происходящих на поверхности Солнца. В связи с тем, что аналогичный проект реализовывался в это время в NASA, европейским ученым было рекомендовано принять участие в работах по этому проекту вместе с американскими специалистами.
5.6.4.5. Проект «Solar Probe»
Проект «Solar Probe», также появившийся в конце 1990-х годов, предполагал запуск АМС к Солнцу, которая должна будет пройти через солнечную корону на высоте не более 2 млн. км, собрать там образцы атомов и измерить величины магнитных полей. Специальный теплозащитный экран должен был обеспечить функционирование аппаратуры АМС при температурах в 2500 раз больших, чем на Земле.АМС должна быть направлена к Солнцу с использованием гравитационного маневра у Юпитера и облететь Солнце на близком расстоянии в плоскости, перпендикулярной плоскости эклиптики.
Проект во многом повторял проект NASA с таким же названием, поэтому разработчикам так же, как в случае проекта «Stereo», было рекомендовано работать совместно с NASA.
5.6.4.8. АМС «Solar Orbiter»
Проект, предложенный в октябре 2000 года, предусматривал создание АМС для исследования Солнца с близких расстояний - до 30 млн. км. АМС массой 1,35 т должна была нести до 100 кг научной нагрузки. Предполагавшаяся рабочая орбита АМС должна была иметь параметры: перигелий - 0,22 а.е. (45 радиусов Солнца, расстояние, равное половине радиуса орбиты Меркурия), период обращения - 150 суток. При нахождении в перигелии угловая скорость АМС почти совпадала бы с угловой скоростью вращения Солнца, и «Solar Orbiter», таким образом, как бы «зависал» на несколько суток над одним участком поверхности Солнца.
Выведение АМС на рабочую орбиту предполагалось произвести с помощью электроионного двигателя и с использованием нескольких гравитационных маневров при пролете Венеры и Земли, при этом наклонение к плоскости солнечного экватора должно было бы изменяться от 12° до 38°.
По состоянию на 2006 год еще не был определен состав научного оборудования, не была выбрана двигательная установка - на химическом топливе или же электроионные двигатели. Не была определена фирма, которая будет головной по изготовлению АМС. Не была решена проблема перегрева солнечных батарей.
На рис. ниже показаны концептуальные проекты двух фирм.
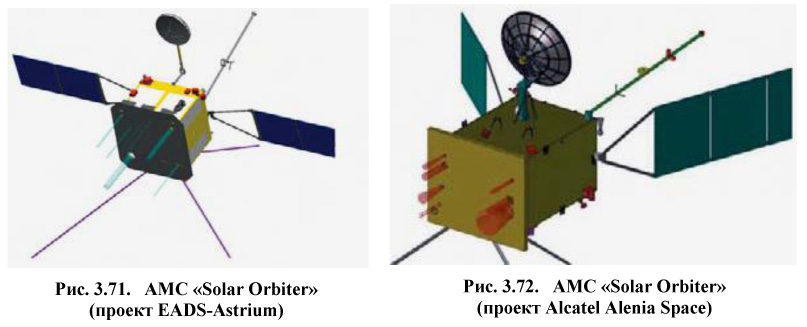
     |
АМС «Solar Orbiter» фирмы Alcatel Alenia Space в соответствии с проектом имеет массу 1 169 кг, в т.ч. 309 кг топлива. Мощность, вырабатываемая солнечными батареями, равна 720-770 Вт.
Первоначально запуск планировалось осуществить в 2010-2012 годах с помощью РН «Союз-2.1б» и РБ «Фрегат» с космодрома Куру. В дальнейшем дата запуска была перенесена на 2015 год. В 2007 году проект АМС «Solar Orbiter» был включен в программу «Cosmic Vision 2015-2025», а в октябре 2011 года ESA окончательно утвердила проект к реализации со сроком запуска 2017 год.
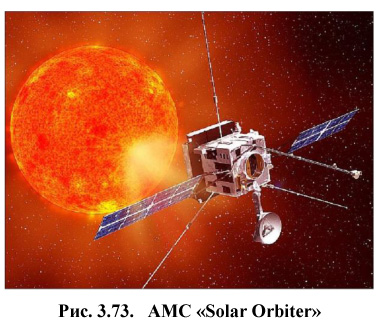
В апреле 2012 года ESA выдала контракт на создание АМС «Solar Orbiter» компании Astrium UK - британскому подразделению фирмы EADS Astrium. Размеры АМС 2,5 х 3,0 х2,5 м. Стартовая масса АМС составила 1 800 кг.
Запуск АМС «Solar Orbiter» ракетой-носителем Atlas V состоялся 10.02.2020 года. АМС была успешно выведена на расчетную гелиоцентрическую орбиту. После нескольких гравитационных маневров при пролете Венеры и Земли АМС должна выйти на рабочую орбиту с перигелием около 42 млн. км (внутри орбиты Меркурия) и афелием 120-135 млн. км. Кроме того, гравитационные маневры около Венеры позволят изменить наклон орбиты АМС до 22° от плоскости эклиптики, а в случае продолжения полета - и до 34°.
5.7.6. Проект «Rosetta»
5.7.6.1. Проект 1991 года
Первоначальный американо-европейский проект «Rosetta» предусматривал разработку двух АМС для доставки на Землю образцов вещества, взятого из ядра кометы. АМС, разрабатывавшаяся NASA, имела название «Shampollion»1, а европейская АМС называлась по имени проекта «Rosetta».
1 Шампольон, Жан-Франсуа - французский ученый, расшифровавший египетскую иероглифическую письменность благодаря двуязычной надписи, найденной на плите около города Розетта (Розеттский камень).
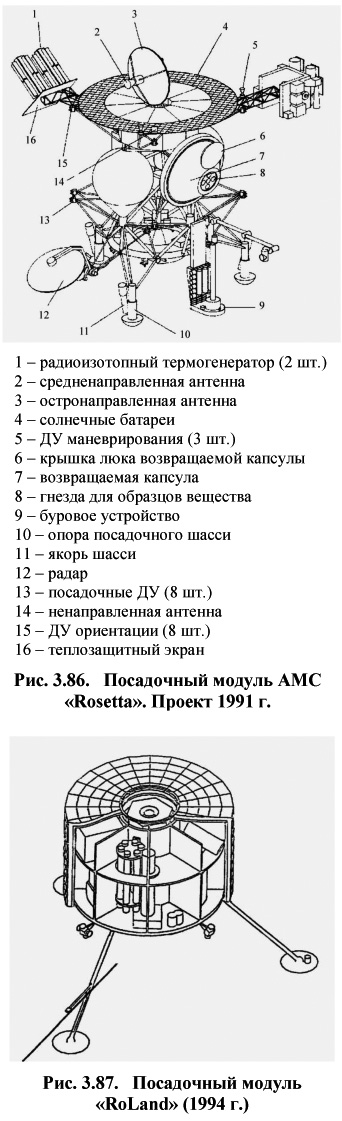
АМС «Rosetta» должна была состоять из перелетного блока и посадочного модуля.
Посадочный модуль состоял из посадочной секции и взлетной секции. В посадочной секции располагалось трехопорное шасси, двигатели посадки и оборудование, работающее на поверхности ядра кометы. Во взлетной секции находилась возвращаемая капсула, двигатели взлета и маневрирования, а также системы, необходимые для траекторных измерений и проведения коррекций.
После касания поверхности опоры шасси должны были фиксироваться в грунте с помощью выстреливаемых якорей-гарпунов. На модуле планировалось установить бурильную установку для взятия образцов вещества ядра кометы. С помощью вспомогательного устройства взятые образцы должны были перегружаться в специальные гнезда в возвращаемой капсуле.
После завершения работы на поверхности ядра кометы взлетная секция должна была отделяться и стартовать с ядра кометы. С помощью бортовых двигателей маневрирования АМС должна была быть направлена на траекторию полета к Земле. При подлете к Земле посадочная капсула должна была отделиться, затормозиться в атмосфере и совершить неуправляемый спуск.
Запуск АМС рассчитывался на РН «Titan IV-Centaur».
5.7.6.2. Изменения проекта в 1992-1998 гг.
В 1992 году бюджетные ограничения вынудили NASA отказаться от участия в проекте «Rosetta», прекратив также работу по своему проекту аналогичного назначения CRAF. Оставшись без партнера, ESA в 1993 году приняло решение ограничиться мягкой посадкой на ядро кометы, отказавшись от более дорогостоящего и сложного варианта доставки образцов вещества.
Переработанный проект АМС предусматривал доставку на ядро кометы двух посадочных модулей массой по 45 кг. Одним модулем должен был стать европейский модуль «RoLand» («ROsetta LANDer»), а вторым - американский модуль АМС «Shampollion», предложение об использовании которого NASA сделала в 1995 году. В ходе работ стало ясно, что доставка двух модулей выходит за возможности проекта, после чего ESA сообщило о конкурсном выборе посадочного модуля. Был выбран европейский проект посадочного модуля, после чего NASA вышла из проекта окончательно.
Корпус посадочного модуля «RoLand» представлял собой цилиндр высотой 450 мм и диаметром 800 мм. К корпусу крепились три опоры шасси. Наружная часть корпуса была покрыта элементами солнечной батареи.
Переход на траекторию посадки и посадка должны были осуществляться с помощью основного двигателя, расположенного в центральной части верхнего днища корпуса, и управляющих двигателей. Кроме служебных систем, модуль нес телекамеры, устройство для взятия образцов грунта, анализаторы газов и твердых веществ, телемикроскоп. Масса модуля - 90 кг. Расчетое время работы посадочного модуля «RoLand» на поверхности ядра кометы - 1 год.
Программа полета по состоянию на сентябрь 1998 года предусматривала запуск ракетой-носителем Ariane 5 в январе 2003 года к комете Виртанена (46P/Wirtanen), при этом во время перелета АМС должна была выполнить пролет астероидов Мимистробелл и Родари. Позднее промежуточные цели были скорректированы - АМС должна была сблизиться с астероидами Отавара и Сива (4979 Otawara и 140 Siwa). После пролета астероидов АМС должна была выйти на орбиту вокруг ядра кометы Виртанена. Высота орбиты - 5-25 радиусов ядра. Посадка модуля на поверхность ядра должна была состояться не позднее декабря 2012 года.
5.7.6.3. АМС «Rosetta»
Концептуальное проектирование АМС «Rosetta» было завершено в 1998 году, после чего были начаты детальная разработка и выпуск рабочей документации.
Корпус АМС «Rosetta» выполнен в виде параллелепипеда со сторонами 2,8 х 2,1 х 2,0 м. На внешних сторонах корпуса размещены остронаправленная антенна диаметром 2,2 м и посадочный модуль. Внутренняя часть корпуса разделена на два отсека: отсек полезной нагрузки и служебный отсек. По двум боковым сторонам корпуса размещены панели солнечных батарей длиной по 14 м (размах 32 м, общая площадь 64 м2). Батареи генерируют мощность от 395 Вт на удалении от Солнца 5,25 а.е. до 8 700 Вт в перигелии траектории кометы (1,292 а.е.).
В отсеке полезной нагрузки размещено научное оборудование и механизмы раскрытия балок с измерительными приборами и датчиками.
Состав научной аппаратуры:
- видеокомплекс OSIRIS;
- видовой спектрометр видимого и инфракрасного диапазона VIRTIS;
- видовой ультрафиолетовый спектрометр ALICE;
- микроволновый спектрометр MIRO;
- масс-спектрометр газов и ионов ROSINA;
- анализатор выделения и скорости пылевых частиц COSIMA;
- газовый хроматограф MODULUS «Berenice»;
- атомный микроскоп для изучения частиц пыли MIDAS;
- радиозонд для изучения крупномасштабной структуры ядра CONSERT;
- анализатор плотности пыли GIADA;
- анализатор плазменных потоков PRC;
- аппаратура для радиоэкспериментов RSI.
В служебном отсеке размещены системы, обеспечивающие полет АМС и работу аппаратуры, а также радиосвязное оборудование. Там же размещены никель-кадмиевые аккумуляторы, топливные баки и двигательная установка. Запас топлива, монометилгидразина и тетраоксида азота, равный 1 720 кг, обеспечивает приращение характеристической скорости 2 200 м/с. Для обеспечения ориентации АМС используются 24 двигателя тягой по 1 кгc.
На корпусе АМС закреплен посадочный модуль «Philae» (рабочее название - SSP, Surface Science Package). Конструкция посадочного модуля несколько отличается от проекта «RoLand». Корпус имеет не круглую, а пятиугольную форму, изменена конструкция шасси. Поперечный размер посадочного модуля около 1 м, высота - 0,8 м. Расчетная скорость посадки - не более 5 м/с. При посадке модуля для прижима к поверхности используются реактивный двигатель. Дополнительными средствами удержания являются два гарпуна, выстреливаемые в грунт после посадки, а также три ввинчиваемых стопора в опорах. В корпусе модуля смонтирована выдвижная телескопическая штанга с видеокамерой. Энергопитание аппаратуры модуля обеспечивается солнечной батареей, размещенной на корпусе модуля, и двумя аккумуляторами.
Расчетный срок работы модуля на поверхности ядра кометы - не менее недели. Допускалось, что при благоприятных условиях модуль может проработать несколько месяцев.
Научная аппаратура посадочного модуля:
- альфа-протон-рентгеновский спектрометр APX;
- анализаторы элементного и изотопного соcтава газов COSAC и MODULUS «Ptolemy»;
- видеокамеры CIVA и ROLIS;
- электроакустический прибор SESAME;
- анализатор физических свойств MUPUS;
- магнитометр и монитор плазмы ROMAP;
- часть аппаратуры CONSERT;
- комплект микрокамер для съемки и спектрометрирования поверхности CIVA;
- ПЗС-камера для съемки при спуске и панорамной телесъемки поверхности ROLIS;
- установка для бурения и взятия образцов грунта SD2.
Масса посадочного модуля 100 кг, в т.ч. 21 кг научной аппаратуры.
Полная масса АМС при старте равна 3 065 кг, в том числе 1 650 кг - топливо, 165 кг - научное оборудование перелетного блока. Ракета-носитель - Ariane 5G+.
Из-за проблем с РН Ariane (авария РН Arian 5EСA в конце 2002 года) старт был перенесен на 2004 год, в связи с чем программа полета была переориентирована на новую цель - комету Чурюмова-Герасименко (67 P/Churyumov-Gerasimenko). Во время полета АМС должна была сблизиться с астероидами Штейнс и Лютеция.
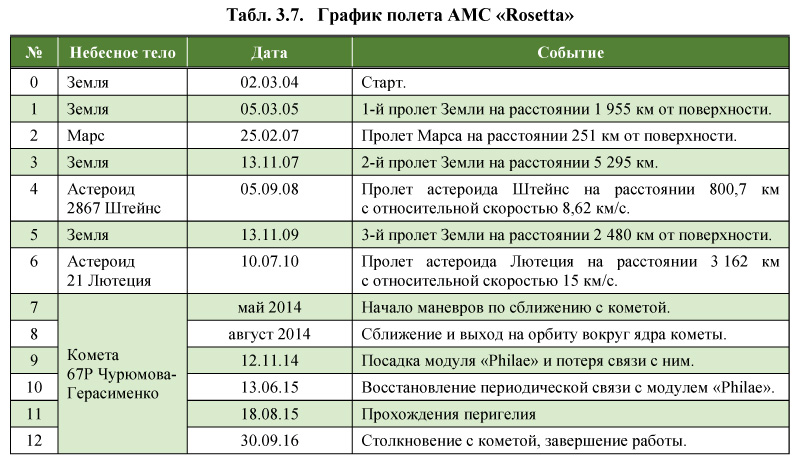
Старт АМС «Rosetta» состоялся 02.03.04 года. АМС была выведена на гелиоцентрическую орбиту, которая многократно корректировалась при пролетах Земли и Марса. График полета АМС приведен в табл. 3.7.
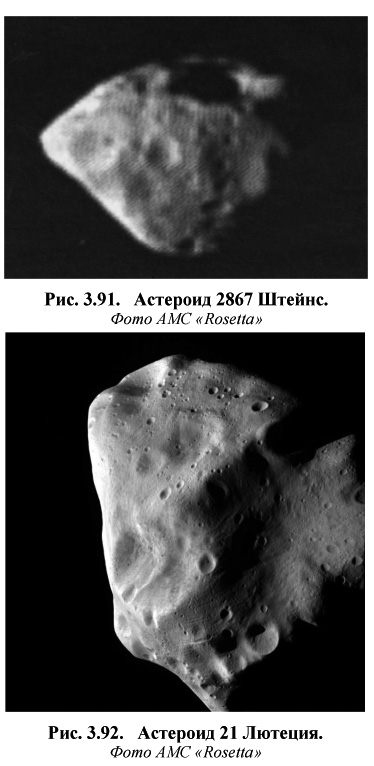
АМС дважды входила в пояс астероидов - в 2008 и 2010 годах. При первом входе АМС пролетела относительно недалеко от астероида 2867 Штейнс (801 км), размер которого составляет около 5 км. При пролете астероида Штейнс не включилась узкоугольная камера NAC, поэтому фотографии удалось получить только широкоугольной камерой.
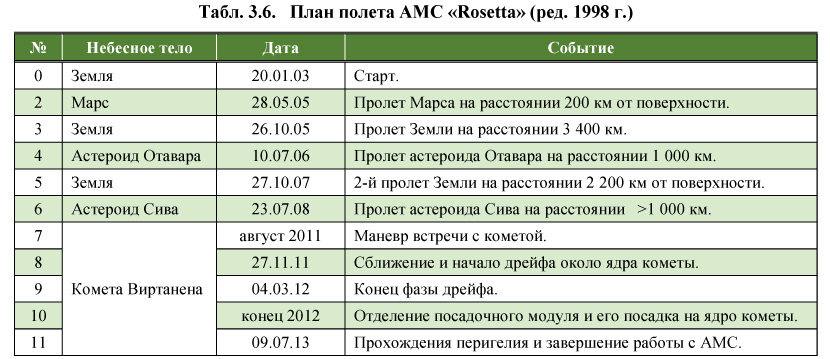
При втором входе в пояс астероидов АМС прошла на расстоянии 3 162 км от астероида 21 Лютеция, но на этот раз была проведена съемка обеими камерами. Наилучшее разрешение фотоснимков - до 60 м.
В июле 2011 года АМС была переведена в «спящий» режим, из которого была выведена в январе 2014 года, за несколько месяцев до начала маневров по сближению с кометой Чурюмова-Герасименко.
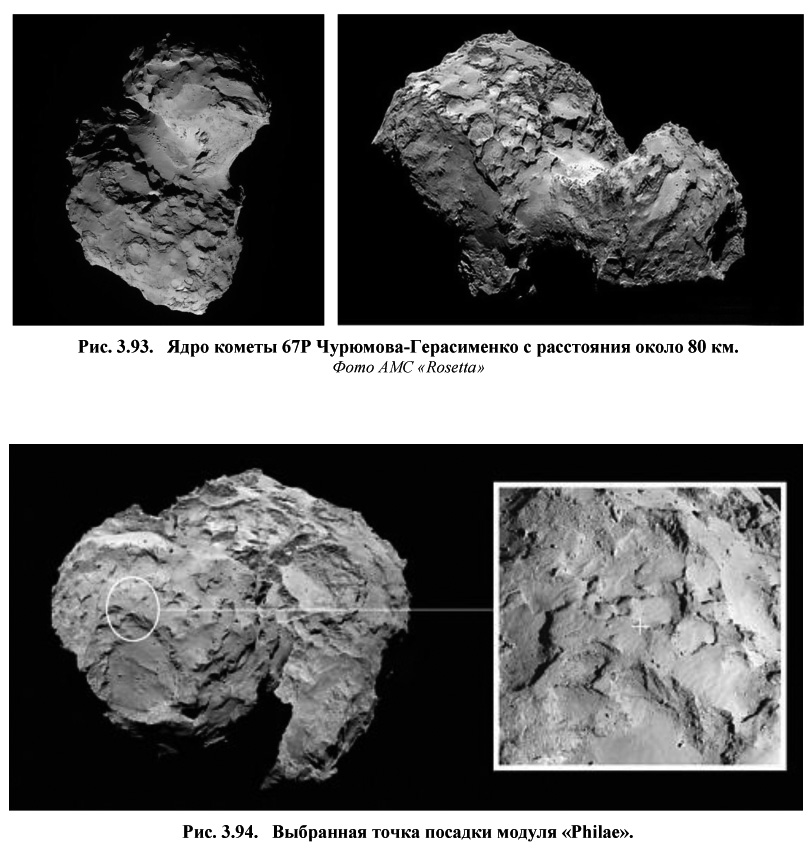
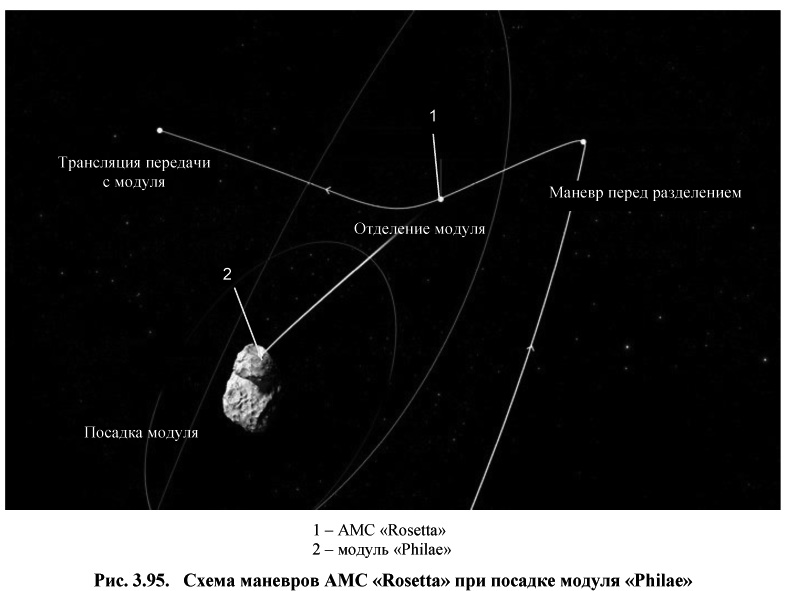
В мае 2014 года начался рабочий процесс сближения АМС с кометой. 06.08.2014 года АМС «Rosetta» приблизилась к комете на расстояние 100 км, что было решено считать началом совместного полета АМС с кометой. Это произошло на расстоянии около 530 млн. км от Солнца, то есть, практически, за поясом астероидов. На таком удалении от Солнца испарения вещества кометы практически не происходило, и внешне ядро кометы походило на обычный астероид.
АМС некоторое время совершала полет почти по одной траектории с кометой, постепенно приближаясь к ней. Подробная съемка всей поверхности проводилась с орбиты высотой 10 км, близкой к круговой. По результатам телесъемки было выбрано место для посадки модуля «Philae», названное Agilkia.
В ноябре 2014 года АМС «Rosetta» выполнила ряд маневров для направления посадочного модуля в выбранную точку поверхности ядра кометы. 12.11.14 г. посадочный модуль «Philae» отделился от АМС и совершил посадку в выбранной точке. В момент касания был включен двигатель прижима, и выполнено выстреливание гарпунов для фиксации модуля на поверхности. Однако, загарпунивания не произошло, модуль отлетел примерно на 1 км от поверхности и снова опустился на комету, после чего еще раз подлетел вверх, теперь уже на небольшую высоту.
Передаваемая модулем информация ретранслировалась на Землю через основную АМС. После отскока модуль опустился на поверхность ядра кометы в нерасчетной точке, вычислить которую не удалось. Модуль оказался в тени и через короткий промежуток времени, когда его аккумуляторная батарея разрядилась, перестал отвечать на вызовы. Попытки обнаружить модуль на крупноформатных снимках поверхности ядра кометы, передаваемых АМС «Rosetta», успехом не увенчались. Специалисты ESA рассчитывали на возобновление работы посадочного модуля, когда комета будет находиться ближе к Солнцу и солнечные батареи модуля «Philae» окажутся в этот период освещенными, что позволит модулю выполнить подзарядку батареи и снова начать функционирование.
13.06.15 г. сигнал от посадочного модуля был вновь получен, сеанс связи продолжался всего 85 с, однако, это позволило оценить состояние систем модуля, как вполне исправное, однако, устойчивой продолжительной связи с модулем так и не удалось добиться. Последний сигнал от модуля был получен 09.07.15 г.
05.09.16 г. ESA сообщила об обнаружении модуля «Philae». Снимки, сделанные телекамерами АМС «Rosetta», позволили установить, что модуль находится в одной из расщелин кометы, расположенных в тени. 26.09.16 г. на АМС «Rosetta» по команде с Земли был отключен блок связи с модулем «Philae». Это было сделано для экономии электроэнергии в связи со значительным удалением АМС от Солнца.
Первоначально назначенный срок завершения работы АМС «Rosetta» - декабрь 2015 года. В июне 2015 года ESA приняла решение о продлении работы с АМС до конца сентября 2016 г.
30 сентября 2016 года АМС «Rosetta» была направлена на столкновение с ядром кометы. Сближение произошло со скоростью менее 1 м/с, поэтому предполагается, что АМС получила минимальные повреждения (возможно, произошло разрушение панелей солнечных батарей) и осталась на поверхности ядра кометы. Параметры положения кометы на момент столкновения были следующими: расстояние от Солнца - около 573 млн. км (за поясом астероидов), расстояние от Земли - около 720 млн. км, скорость относительно Солнца - 14,39 км/с.
Одним из важнейших результатов полета АМС «Rosetta» явилось получение неопровержимых данных, что кометы рождались в очень холодной области протопланетного облака в эпоху стадии формирования Солнечной системы и не являются осколками от столкновений более крупных тел. Важно также, что, как оказалось, воды в кометных ядрах мало, а ее изотопный состав отличается от земного, на основании чего можно утверждать, что кометы не являлись источниками воды на Земле.
5.10. Тематические программы
5.10.1. Программа «SMART»
В 1999 году Европейское космическое агентство (ESA) объявило о новом подходе к созданию АМС. Аналогично программе NASA «New Millenium» должна быть создана серия малых АМС. Целью программы является отработка новых технологий, которые будут в дальнейшем использоваться в новых космических аппаратах. Программа получила название «SMART» (Small Missions for Advanced Research in Technology - небольшие миссии для передовых исследований в технологии).
5.10.1.1. АМС «SMART-1»
АМС «SMART-1» являлась первой из предполагаемой серии АМС «SMART». На этапе проектирования изучалась возможность отправки АМС к различным астероидам. После закрытия проекта «EuroMoon» было решено использовать АМС для исследования Луны с орбиты ИСЛ. Подробная информация по АМС «SMART-1» приведена в п. 5.1.6.
 7.3.2. АМС «Nozomi» («Planet B»)
7.3.2. АМС «Nozomi» («Planet B»)Начиная с 1992 года японским Институтом космических и астронавтических наук (ISAS) велась разработка АМС «Planet B» с целью выведения на орбиту искусственного спутника Марса. После запуска в 1998 году АМС получила название «Nozomi», что в переводе с японского означает «Надежда».
Назначение АМС:
- исследование верхних слоев марсианской атмосферы и их взаимодействия с солнечным ветром.
- отработка конструкции и технологии для будущих АМС;
- получение изображений марсианской поверхности с орбиты ИСМ;
- получение фотоизображений Фобоса и Деймоса.
В состав научной аппаратуры входили:
- анализаторы спектра электронов и ионов;
- детектор высокоэнергетических частиц;
- датчик температуры электронов;
- трехосный магнитометр;
- сканирующий ультрафиолетовый спектрометр;
- спектрометр видимого и ультрафиолетового диапазона;
- детекторы газовых и плазменных волн;
- цветная ПЗС-камера;
- масс-спектрометр нейтральных частиц;
- анализатор тепловой плазмы;
- анализатор тепловой плазмы;
- ионный масс-спектрограф;
- счетчик пылевых частиц;
- низкочастотный волновой анализатор.
Энергопитание аппаратуры АМС обеспечивалось двумя солнечными батареями и никель-металлогидридными аккумуляторами. На верхней части корпуса была размещена остронаправленная антенна диаметром 1,6 м, с другой стороны находилась двигательная установка, работающая на гидразине и тетраоксиде азота. Тяга ДУ - 51 кгс. Ориентация АМС осуществлялась10 двигателями, работающими на моногидразине, тягой по 0,23 кгс.
  |
Масса АМС - 541 кг, в т.ч. 282 кг - топливо и около 35 кг - научная аппаратура.
Ракета-носитель - M-V KM.
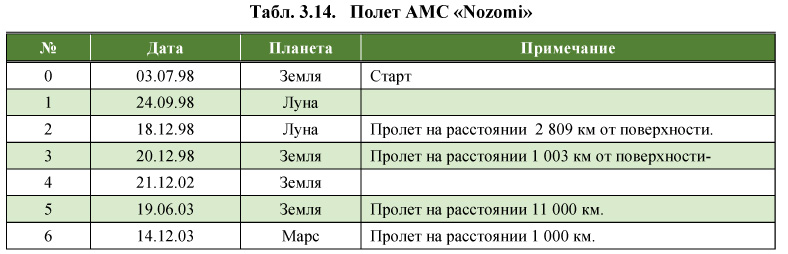
 АМС «Nozomi» была выведена 03.07.98 года на эллиптическую орбиту 340 х 580 000 км. Из-за превышения расчетной скорости последней ступени РН апогей оказался выше расчетного на 180 000 км, поэтому 04.07.98 г. была проведена коррекция орбиты, параметры которой после этого составили 341 х 401 493 км, наклонение 28,62° , период обращения 10 суток 20 ч 55 мин.
АМС «Nozomi» была выведена 03.07.98 года на эллиптическую орбиту 340 х 580 000 км. Из-за превышения расчетной скорости последней ступени РН апогей оказался выше расчетного на 180 000 км, поэтому 04.07.98 г. была проведена коррекция орбиты, параметры которой после этого составили 341 х 401 493 км, наклонение 28,62° , период обращения 10 суток 20 ч 55 мин.В соответствии с расчетной программой АМС должна была выполнить 6,5 витков по полученной орбите, затем дважды - на восходящей ветви орбиты и при обратном пролете, - совершить гравитационный маневр при пролете Луны, после чего при пролете Земли включить ДУ для выдачи разгонного импульса. После 10 месяцев полета АМС должна была выйти на орбиту спутника Марса с параметрами: высота 150-300 х 27 300 км, наклонение 138° . После выхода на околомарсианскую орбиту АМС должна быть стабилизирована вращением таким образом, чтобы остронаправленная антенна была обращена в сторону Земли.
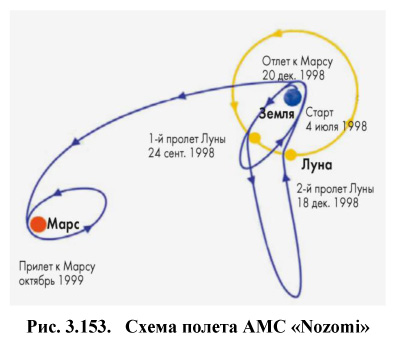
24.09.98 г. и 18.12.98 г. АМС выполнила гравитационные маневры в поле тяготения Луны для увеличения апогея орбиты. 20.12.98 года при пролете около Земли на расстоянии 1 003 км была включена двигательная установка для перевода АМС на траекторию полета к Марсу с расчетной датой прибытия - 11.10.99 г. При включении ДУ не закрылся топливный клапан, из-за чего произошел перерасход топлива. АМС «Nozomi» вышла на нерасчетную траекторию. 21.12.98 года были произведены два включения ДУ для коррекции траектории, в результате чего АМС осталась практически без запаса топлива.
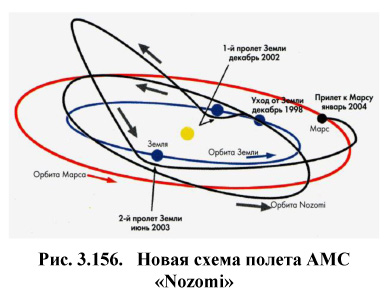
Рассчитанная с учетом сложившейся ситуации новая схема полета (рис. 3.156) предусматривала продолжение полета АМС по гелиоцентрической орбите в течение четырех лет, при этом должны были быть выполнены два гравитационных маневра при пролетах Земли: в декабре 2002 года и в июне 2003 года. При выполнении такой программы АМС «Nozomi» должна была приблизиться к Марсу в декабре 2003 года с относительно небольшой скоростью.
По новой программе полета планировалось вывести АМС «Nozomi» на орбиту ИСМ высотой 300 х 43 500 км и наклонением 137,6° , затем минимальная высота орбиты должны была быть уменьшена до 155 км (период 38,5 ч.). АМС должна была быть стабилизирована вращением со скоростью 7,5 об/мин, при этом ось вращения, проходящая через ось остронаправленной антенны, должна быть направлена на Землю.
21.04.02 года мощная солнечная вспышка частично вывела из строя бортовую аппаратуру АМС, в том числе систему энергопитания. Из-за отсутствия электроэнергии отключился подогрев топливного бака, и произошло замерзание гидразина. К моменту приближения АМС к Земле гидразин оттаял, и необходимую коррекцию траектории все-таки удалось сделать. Маневр при пролете Земли в декабре 2002 года был выполнен успешно. Так же успешно был выполнен следующий гравитационный маневр при пролете Земли 19.06.03 года.
09.12.03 года не удалось сориентировать АМС для подготовки к запуску ТДУ с целью выхода на орбиту ИСМ. Запущенные двигатели малой тяги смогли только частично уменьшить дистанцию пролета АМС около Марса. 14.12.03 года АМС «Nozomi» прошла на расстоянии 1 000 км от Марса и вышла на гелиоцентрическую орбиту с двухгодичным периодом.
3.4. International Space Enterprises
В 1996 году фирма International Space Enterprises (ISE), расположенная в Сан-Диего, США, объявила о разработке мини-роверов для исследования Луны и Марса. Опытные модели роверов имели длину от 35 до 46 см при ширине около 35 см. Масса роверов - 13,5 кг. Теле управление роверами осуществлялось с помощью обычного персонального компьютера.
Разработка роверов выполнялась в рамках программы Small Business Innovation Research (Исследование инноваций средствами малого бизнеса), которой руководила Лаборатория JPL.
3.11. SpaceDev
3.11.1. АМС «NEAP»
Частная компания SpaceDev (Space Development Corporation) в 1997 году начала разработку АМС «NEAP» (Near Earth Asteroid Prospector) для изучения астероидов, близко приближающихся к Земле.
Цель исследования заключается в поиске на астероидах воды и минералов для дальнейшей их добычи и переработки. Специалисты компании полагали, что на астероидах могут быть найдены источники полезных ископаемых стоимостью в триллионы долларов.
Проект являлся коммерческим, то есть, компания предлагала заинтересованным организациям (научно-исследовательским центрам, университетам и др.) купить место на АМС для установки своих приборов. Планировалось также после полета продавать полученную научную информацию
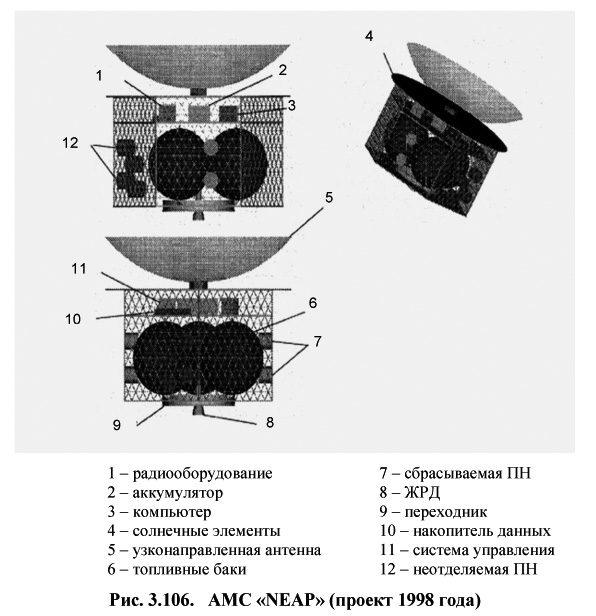
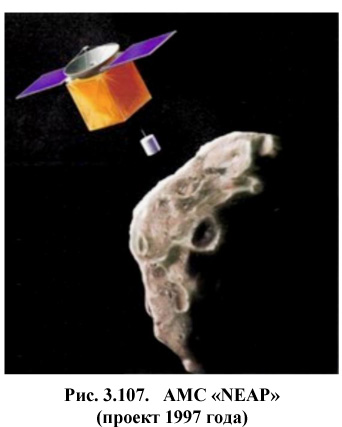 Заказчикам оказывались услуги по обеспечению температурного режима и электропитания для их оборудования, а также передача получаемых данных на Землю. Рассматривалась возможность сброса контейнера с аппаратурой на поверхность астероида. По окончании работы АМС около астероида могла быть выполнена посадка на его поверхность.
Заказчикам оказывались услуги по обеспечению температурного режима и электропитания для их оборудования, а также передача получаемых данных на Землю. Рассматривалась возможность сброса контейнера с аппаратурой на поверхность астероида. По окончании работы АМС около астероида могла быть выполнена посадка на его поверхность.АМС, выполненная в виде куба с двумя раскрывающимися панелями солнечных батарей, должна была иметь трехосную ориентацию. Масса АМС «NEAP» ориентировочно составляла 350-500 кг.
В конце 1997 года в качестве цели рассматривались астероиды 1993 BX3 и 1996 FO3. При старте в интервале от середины 1999 года до середины 2000 года длительность полета АМС к астероиду составила бы от 9 до 15 месяцев.
В связи с тем, что на проработку и согласование проекта ушло больше времени, чем ожидалось, в марте 1998 года была определена новая цель - 175-метровый астероид 1996 XB27. Дата старта могла находиться в диапазоне с октября 2000 года по февраль 2001 года, прибытие АМС к астероиду должно было состояться в этом случае после июля 2001 года.
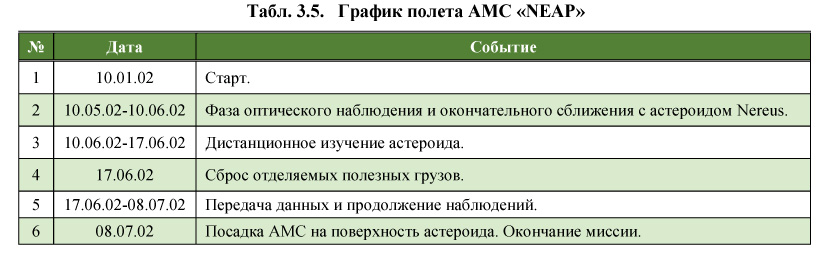
В мае-июне 1998 года была проведена полная ревизия проекта. Был сделан окончательный выбор - астероид 1982 DB, получивший позднее имя Нереус (4660 Nereus). Диаметр астероида около 300 м. Была пересмотрена конструкция АМС. Корпус АМС приобрел форму шестигранной призмы, на гранях которой размещались солнечные батареи. Внутри корпуса устанавливались ЖРД тягой 45 кгс и емкости с топливом. Грузы заказчиков могли быть, по желанию заказчика, отделены от АМС в любой точке траектории, в том числе при подлете к астероиду. Стартовое окно для полета к астероиду Нереус длилось с апреля 2001 года по январь 2002 года.
Планировавшийся график полета АМС при старте 10.01.02 года показан в табл. 3.5.
Компания SpaceDev предлагала проект «NEAP» в 1999 году для рассмотрения в качестве кандидата на финансирование NASA в рамках программы Discovery.
Проект не получил поддержки NASA, более того, компания SpaceDev была обвинена в нарушении законодательства США в процессе привлечения инвесторов, в связи с чем работы по проекту АМС «NEAP» были прекращены.
3.13. Team Encounter
3.13.1. АМС «Encounter 2001»
В 1999 году компания Encounter 2001, LLC совместно с компаниями AeroAstro Inc. и L'Garde, Inc. (в дальнейшем - Team Encounter) приступила к разработке АМС с солнечным парусом «Encounter 2001». На борту этой АМС предлагалось отправить за пределы Солнечной системы фотографии, послания, рисунки, человеческую ДНК и ДНК животных, а также как минимум один научный прибор.
Компания Encounter 2001, LLC рассчитывала собрать необходимые средства, объявив, что каждый, заплатив 50$, может отправить на АМС прядь собственных волос (то есть свою ДНК), свой оцифрованный портрет и короткую записку братьям по разуму.
АМС должна была состоять из трех блоков: орбитальный модуль, включающий РБ SPORT разработки AeroAstro Inc., блок полезной нагрузки (ПН) и солнечный парус. Полная масса АМС - 153 кг, в т.ч. 15 кг блок солнечного паруса, 3 кг - ПН.
Запуск на орбиту ИСЗ предполагалось осуществить как дополнительный груз на РН Ariane 5 в конце 2003 года. АМС должна была выводиться на высокую околоземную орбиту, затем с помощью РБ перейти с апогейного участка на траекторию полета к Юпитеру. После отделения отработавшего орбитального модуля должно было начаться развертывание солнечного паруса. Процесс развертывания должен был фиксироваться видеосъемкой с орбитального модуля. Полностью раскрытый парус имел бы размеры 75 х 75 м и создавал бы постоянное усилие, разгоняющее АМС. АМС, ускоряемая давлением солнечного света на парус, должна была разогнаться до скорости, обеспечивающей покидание Солнечной Системы.
Поскольку привлечь требуемое количество вкладчиков (от 1,5 млн. до 4,5 млн. человек) не удалось, проект не был реализован, но этим проектом заинтересовалась NASA, благодаря чему работа над проектом продолжилась.
3.13.2. АМС «Starship»
NASA подписала с компанией Team Encounter контракт на установку на АМС экспериментального прибора для межзвездной навигации. АМС «Starship» должна была иметь парус площадью 4 900 м2, сторона квадрата паруса - 76,88 м. Запуск АМС, получившей название «Starship» («Звездный корабль»), был назначен на 2006 год.
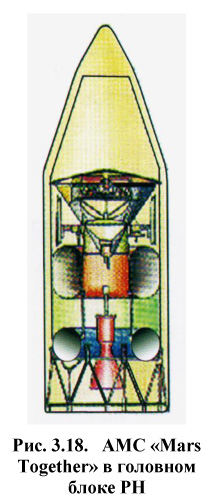
5.1.1. Программа «На Марс - вместе»
5.1.1. Программа «На Марс - вместе»
Программа «На Марс - вместе» («Mars Together») появилась на свет в июне 1994 года, как один из шагов по реализации подписанного Россией и США в июне 1992 года «Соглашения о сотрудничестве в области освоения и использования космического пространства в мирных целях». Начальные предложения включали запуски совместно разработанных АМС для исследования Марса в 1998 и 2001 годах.
В 1997 году в качестве совместной разработки по программе «На Марс - вместе» был предложен проект доставки на Марс в 2001 году российского посадочного модуля с АМС «Марсоход-2». На марсоходе должны были устанавливаться две цветные и две черно-белые телекамеры, манипулятор. В разработке научных приборов для марсохода должны были принять участие ученые России, США, Германии, Венгрии, Франции и Финляндии.
Скорость движения марсохода - около 15 см/с, суточный путь - до 200 м. Расчетный запас хода - 100 км. Расчетная длительность работы на Марсе - не менее 1 года. Масса посадочного модуля - 320 кг, марсохода - около 95 кг, в т.ч. 12 кг научной аппаратуры.
Американская сторона должна была разработать траекторный блок, который обеспечивал бы доставку посадочного модуля к Марсу и его вход в атмосферу по заданной траектории, без выхода на орбиту искусственного спутника. Траекторный блок должен был создаваться на базе АМС «Mars Surveyor 98» («Mars Polar Lander»).
Запуск одной АМС планировалось выполнить в 2001 году с помощью РН 8К78М «Молния-М».
Работы по проекту продвигались очень медленно, т.к. российские разработчики отдавали предпочтение национальным проектам, а американская сторона не была уверена в возможности России финансировать эту работу в нужном объеме. Об отношении NASA к совместному проекту говорит тот факт, что NASA продолжала автономные работы для запуска в том же 2001 году АМС «Mars Surveyor 2001 Lander» с марсоходом «Athena», аналогичной по задачам АМС «Mars Together».
Работы по программе «На Марс - вместе» были прекращены в конце 1997 года.
5.1.3. Проект «InterMarsNet»
В 1997 году Планетная секция Совета РАН по космосу в своих предложениях, поданных на рассмотрение Совету, выдвинула в числе прочих проект «InterMarsNet» - создание совместно с NASA сети автоматических станций на Марсе для глобального изучения планеты. Проект являлся развитием программы «На Марс - вместе» («Mars Together») и также не был реализован.
5.3. Проект «Фобос-Грунт»
После бесславной кончины проекта М1, вслед за которым в случае его успеха могли бы последовать проекты М2 и М3, в российских планах марсианских исследований образовалась пустота. Для заполнения этой пустоты был извлечен из забвения проект 2Ф - АМС для доставки на Землю проб грунта с Фобоса. Еще в 1983 году срок реализации этого проекта был определен 1994 годом. Начиная с 1997 года этому проекту была дана вторая жизнь, хотя это также потребовало создания нескольких промежуточных проектов.
5.3.1. ПРОЕКТ «МАРС-2001»
В начале 1997 года Межведомственная экспертная комиссия по космосу при РАН предложила создать АМС для исследования Марса, условно названную «Марс-2001». АМС должна была решать комплекс задач:
- доставка малого посадочного модуля;
- изучение Марса с орбиты искусственного спутника;
- мягкая посадка на Фобос;
- доставка на Землю образцов грунта Фобоса.
АМС должна была иметь электрореактивные двигатели. Масса конструкции АМС «Марс-2001» около 1 т. Запуск АМС предлагалось осуществить в 2001 году с помощью РН «Молния-М» или «Союз-2 - Фрегат». Длительность перелета Земля-Марс - 550 суток.
5.3.2. Рождение проекта «Фобос-Грунт»
В 1997 году, после неудачного запуска АМС «Марс-8» («Марс-96»), Институт космических исследований (ИКИ) и Институт геохимии и аналитической химии им. Вернадского (ГЕОХИ) предложили на рассмотрение Совету РАН по космосу три темы для проведения НИР по разработке АМС:
- «Луна-Глоб» - исследования Луны (запуск в 1999 году);
- «Марс-Астер» - доставка на Марс марсохода и пенетраторов (2001 год, в рамках программы «На Марс - вместе»);
- «Фобос-Грунт» - доставка грунта Фобоса (запуск АМС в 2003 году).
Все АМС должны были создаваться на единой платформе, использовать электрореактивные двигатели и запускаться РН среднего класса.
Испытания универсальной платформы предлагалось провести в 1999 году в запуске на окололунную полярную орбиту АМС «Луна-Глоб». Вместо посадочного модуля и возвратной ракеты, которые предусматривались в составе полностью укомплектованной АМС, для упрощенного лунного варианта предлагалось установить 2-3 пенетратора, разработанных по программе «Марс-96».
После обсуждения Планетная секция Совета РАН по космосу одобрила проект АМС «Луна-Глоб». Проекты «Марс-Астер» и «Фобос-Грунт» было предложено объединить в одной АМС «Марс-Фобос-Грунт» с запуском в 2001 году. АМС должна была доставить на Марс посадочный модуль с марсоходом, а орбитальный модуль, который нес также возвратную ракету, должен был выполнить забор грунта с поверхности Фобоса.
Планетная секция рассмотрела также перспективные продолжения намеченной программы:
- 2004 год - доставка грунта с Луны;
- 2005 год - участие в программе NASA по доставке грунта с Марса;
- 2006 год - доставка лунохода на поверхность Луны;
- 2007 год - создание сети АМС на Марсе (совместно с NASA, проект «InterMarsNet»);
- 2008 год - запуск АМС для доставки грунта с одного из астероидов.
В связи с тяжелейшим положением с финансированием научно-конструкторских работ, Совет РАН по космосу в апреле 1998 года принял решение ограничиться краткосрочным планированием работ и оставить только одну тему из предложенных.
В июне 1998 года на заседании Планетной секции для дальнейшей разработки был выбран проект «Фобос-Грунт», при этом было рекомендовано ограничиться доставкой грунта с Фобоса, перенеся собственно марсианские задачи - доставку марсохода и пенетраторов, - на более позднее время. Запуск АМС «Фобос-Грунт» предлагалось произвести с помощью РН «Союз-2» в 2003 году.
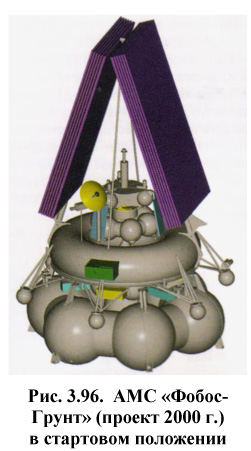
5.3.3. Проект АМС «Фобос-Грунт» 2000 года
Эскизный проект АМС «Фобос-Грунт» был разработан в 2000 году.
Основные задачи проекта «Фобос-Грунт» были сформулированы следующим образом:
- определить происхождение спутников Марса - Фобоса и Деймоса и их отношение к Марсу;
- решить, является ли Фобос захваченным астероидом или телом, имеющим «генетическую» связь с Марсом. Полученные результаты могли бы быть использованы при исследовании спутниковых систем других планет;
  |
- доставить на Землю образец реликтового (первичного) вещества, из которого, предположительно, состоит Фобос.
Одновременно ставилась цель провести исследования:
- атмосферы и поверхности Марса;
- околопланетной среды в окрестностях Марса и Фобоса (пылевая и газовая составляющие);
- взаимодействия солнечного ветра с телами Солнечной системы;
- технические исследования (поведение новых систем в длительном полете).
АМС «Фобос-Грунт» состоит из четырех модулей:
- орбитально-перелетный модуль;
- блок сбрасываемых баков;
- модуль электрореактивной двигательной установки (ЭРДУ);
- взлетная ракета.
В состав орбитально-перелетного модуля входит ДУ, используемая на этапах разгона у Земли, при торможении у Марса и при посадке на Фобос, термостабилизированная платформа со служебным и научным оборудованием и панели солнечных батарей площадью 55-60 м2, обеспечивающие у Земли полную электрическую мощность 9 кВт.
Состав научной аппаратуры:
- панорамная ТВ-камера,
- гамма-спектрометр,
- нейтронный детектор,
- хромато-масс-спектрометр,
- сейсмометр,
- температурный анализатор,
- длинноволновый радар,
- фотометр пылевой среды,
- прибор для определения параметров движения Фобоса,
- комплекс плазменных детекторов,
- анализатор космической пыли,
- генератор допплеровских измерений
- навигационная камера,
- радиодальномер,
- плазменно-волновой детектор,
- аппаратура для контроля влияния ЭРДУ на характеристики СБ и конструкционные материалы.
Блок сбрасываемых топливных баков содержит топливо, используемое основной ДУ при разгоне с околоземной орбиты.
Модуль ЭРДУ включает собственно электрореактивную двигательную установку и баки с ксеноном, который является рабочим телом для ЭРДУ. Энергию для своей работы ЭРДУ получает от солнечных батарей орбитально-перелетного модуля. Запас ксенона составляет 425 кг.
Взлетная ракета состоит из двух ракетных ступеней и спускаемого аппарата. Масса взлетной ракеты - 350 кг, в т.ч. масса спускаемого аппарата - 12 кг.
Полная масса АМС при старте составляет 7 250 кг, в момент выхода на гелиоцентрическую орбиту - 2 370 кг.
Схема полета АМС выглядит следующим образом.
Запуск и выведение АМС на околоземную опорную орбиту производится РН «Союз-ФГ». Включением основной ДУ АМС переводится с опорной орбиты на траекторию полета к Марсу. После выработки топлива из блока топливных баков ДУ выключается, а блок топливных баков отбрасывается. Включается ЭРДУ, работающая весь участок перелета до Марса, после чего модуль ЭРДУ также отделяется. Для выхода на околомарсианскую орбиту основная ДУ включается повторно, при этом используется топливо из баков орбитально-перелетного модуля. После выполнения необходимых расчетов орбита АМС корректируется таким образом, чтобы обеспечить сближение с Фобосом при практически совпадающих векторах орбитальных скоростей. Далее, используя ДУ малой тяги, АМС приближается к поверхности Фобоса с конечной скоростью около 0,5 м/с. В непосредственной близости к поверхности с АМС на тросиках выстреливаются несколько «гарпунов», которые заглубляются в грунт. Далее с помощью тросиков АМС подтягивается к поверхности и фиксируется на ней.
Через некоторое время после посадки включается грунтозаборное устройство, которое переносит и помещает в капсулу, находящуюся в спускаемом аппарате взлетной ракеты, около 170 г грунта Фобоса. Затем грунтозаборное устройство отводится в сторону, а взлетная ракета стартует в сторону Земли.
На этапе перелета выполняются необходимые траекторные измерения и коррекции траектории. Перед входом в атмосферу Земли спускаемый аппарат отделяется и совершает посадку на территории России.
Орбитально-перелетный блок остается на Фобосе и продолжает выполнять программу научных исследований. Расчетное время работы АМС на Фобосе - 3 месяца.
Планировалось старт АМС «Фобос-Грунт» произвести в декабре 2004 г.-июне 2005 г. Длительность полета к Марсу оценивалась в 800 суток, в этом случае возвращение спускаемого аппарата с образцами грунта Фобоса произошло бы в мае-июне 2008 г.
6.1. Исследования внешних планет
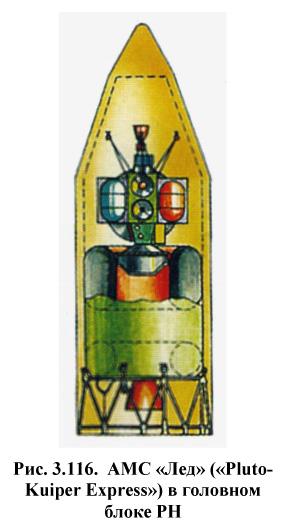 6.1.4. Проект «Лед»
6.1.4. Проект «Лед»Начало проекту «Лед» положило совместное решение РКА и NASA, принятое в апреле 1994 года, о разработке АМС для полета к Плутону (как часть проекта, получившего наименование «Лед и Пламя»). В соответствии с предложением, США должны были разработать пролетную АМС, а Россия - посадочный зонд. Зонд должен был нести масс-спектрометр (или анализатор электрических зарядов), телекамеру и акселерометр.
АМС, запускаемая в 2001-2002 году, должна была совершить два или три гравитационных маневра у Венеры и один гравитационный маневр у Юпитера. Полет до Плутона должен был продолжаться 12 лет. За месяц до сближения с Плутоном посадочный зонд должен был отделиться от траекторного блока и либо войти в атмосферу Плутона, либо пролететь на минимально возможном расстоянии от него. Траекторный блок должен был бы принимать информацию с зонда и затем ретранслировать ее на Землю. Траектория полета рассчитывалась таким образом, чтобы АМС прошла на расстоянии 15 000 км от Плутона и на расстоянии 5 000 км от его спутника Харона.
АМС должна была иметь массу 720 кг, в т.ч. 620 кг -двигательная установка с запасами топлива для траекторных маневров, 85 кг - траекторный блок АМС, 10 кг -посадочный зонд. Запуск АМС рассчитывался на РН 8К78М «Молния-М» или «Союз-2-Фрегат».
В США этот проект имел название «Pluto Express» («Pluto-Kuiper Express»). В дальнейших работах по проекту NASA отказалась от использования посадочного зонда в связи с отсутствием финансирования у российской стороны. Разрабатывать посадочный аппарат самостоятельно NASA не планировала также в связи с отсутствием выделенных для этого средств. Более того, из-за недостатка финансирования проект «Pluto Express» был закрыт вообще, и только под давлением научной общественности NASA реанимировала проект АМС для полета к Плутону под названием «New Horizons» («Новые горизонты»).
6.4. «Солнечные» АМС
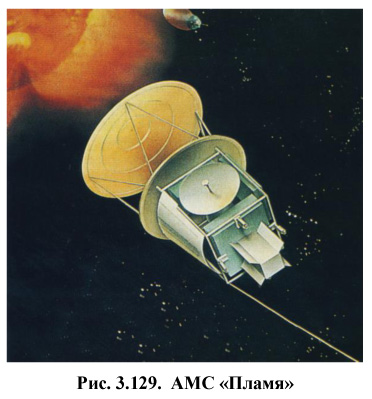  |
В 1994 году в рамках совместного решения РКА и NASA была достигнута договоренность еще об одном совместном проекте, получившем в России наименование «Пламя». Целью проекта являлось исследования Солнца и солнечной короны. В российской части проекта были использованы наработки по проекту АМС «Циолковский».
Предполагалось запустить две АМС - российскую АМС «Пламя» и американскую АМС «Solar Probe» на одной РН 8К82К «Протон-К» с двумя разгонными блоками: ДМ и «Star-48B». АМС должны были быть выведены на траекторию полета к Юпитеру. После выполнения гравитационного маневра АМС должны были перейти на эллиптические орбиты с перигелием 2,74 млн. км (американская АМС) и 6,9 млн. км (российская АМС). Обе АМС должны были при облете Солнца проходить через полярные области околосолнечного пространства.
Масса АМС «Пламя» 350 кг, в т.ч. 35 кг научной аппаратуры.
Запуск АМС планировалось произвести в 2003 году. Длительность полета до Юпитера - 530 суток, время полета до перигелия (полупериод обращения) - 800 суток.
Работы по проекту прекращены в конце 1997 года.
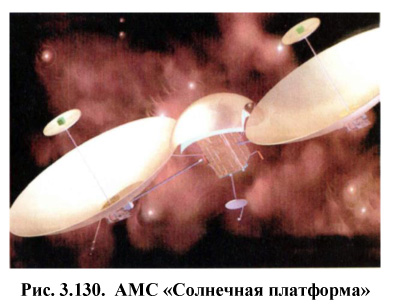
6.4.4. Проект АМС «Солнечная платформа»
В 1999 году РКК «Энергия» разработала проект АМС «Солнечная платформа».
АМС имеет электрореактивную ДУ, работающую от плоских термоэмиссионных электрических преобразователей, установленных в фокусах двух параболических концентраторов. Площадь каждого из концентраторов - около 30 м2.
ДУ состоит из двух пар двигателей Д-55 разработки ЦНИИМаш, тягой по 6 гс каждый.
Для обеспечения теплового режима бортовой аппаратуры на центральном блоке АМС устанавливается специальный радиационный экран, состоящий из двух зеркальных поверхностей, расположенных одна над другой.
Масса АМС около 1 000 кг, в т.ч. 100 кг научной аппаратуры и 160 кг ксенона.
Запуск АМС производится РН «Молния». АМС выводится на траекторию полета к Венере. Используя четыре гравитационных маневра при последовательных пролетах около Венеры, АМС выходит на рабочую орбиту с радиусом перигелия 20 млн. км и наклонением к плоскости эклиптики 40 град.
Проект являлся скорее рекламным, чем всерьез рассчитанным на реализацию, т.к. предложенная энергетическая установка представляет собой новое непроверенное решение, да к тому же на базе сложной пространственной конструкции, развертывание которой само по себе является сложной и требующей отработки задачей.
6.4.5. Проект «Интергелиос»
В конце 1990-х годов ESA определила одной из краеугольных задач космических исследований задачу изучения Солнца, в том числе с близких расстояний. Программа создания АМС для наблюдения Солнца с орбиты, имеющей перигелий менее орбиты Меркурия, получила наименование «Interhelios». К работе над проектом были приглашены ученые разных стран. В процессе работ разными разработчиками, в том числе и российскими, было последовательно подготовлено несколько проектов АМС.
6.4.5.1. Проект «Солнечный зонд»
В СССР научно-исследовательские работы по определению характеристик аппарата для изучения Солнца с близких расстояний проводились с 1980-х годов. НИР «Солнечный зонд», выполненная в ЦНИИМаш, была направлена на разработку основы конструкции околосолнечной АМС - конических многослойных теплозащитных экранов. Позднее результаты НИР были переданы в ИЗМИРАН, где были положены в основу проекта АМС «Интергелиос».
6.4.5.2. Проект АМС «Интергелиос»
Российско-германский проект «Интергелиос» предусматривал создание АМС для исследования Солнца с расстояния 12-30 солнечных радиусов. АМС должна быть выведена на рабочую гелиоцентрическую орбиту путем многократного использования гравитационных маневров при пролете Венеры. Проект разрабатывался Российской академией наук в конце 1990-х годов с участием ученых из Германии.
7.1.4. КА «АРКОН-1» («АРАКС» 11Ф664)
Спутник двойного назначения (военного - оптико-электронной разведки, и гражданского - наблюдения за земной поверхностью в интересах науки, экологии и народного хозяйства) на базе модуля МВМ.
КА предназначался для проведения съемки поверхности Земли в восьми полосах видимого и ближнего ИК диапазонов (0.4-1.1 мкм). Зеркальная телескопическая система КА имела фокусное расстояние 27 м, разрешение 2-5 м и ширину полосы захвата 30 км.
Были запущены два КА: 06.06.97 г. «Космос-2344» и 25.07.02 г. «Космос-2392». Перигей составляет около 1 500 км, апогей - 1 700-2 700 км, наклонение орбиты 63,5 град. Масса - около 6 000 кг. Запуск производился РН 8К82К «Протон-К» с разгонным блоком 17С40.